1.本发明涉及一种用于控制/调节线路工程用机械的作业机组的旋转驱动器的方法,其中,借助传感器检测根据驱动器的旋转得出的测量参量,该测量参量具有近似周期性的曲线函数,其中,借助评估装置确定曲线函数的频率或周期时间,并且其中,所述频率或周期时间与用于预设调节信号的额定值相比较。此外,本发明还涉及一种用于实施该方法的设备。
背景技术:
2.从auer f.等人的公开文献:用于可持续的轨道改进的高技术捣固机组,ei
‑
铁路工程师,2015年11月,第18
‑
22页已知一种用于捣固机组的旋转驱动器的转速调节的方法。偏心轴被驱动以用于产生振动,振动通过进给驱动器被传输到捣固镐。
3.因此提供在捣固周期期间有针对性地改变振动频率的可能性。在捣固镐到碎石道床中的沉入过程期间预设更高的频率(42
‑
50hz)。在捣固镐的挤压过程中,最佳的频率为35hz。在提升状态下,设置更小的空转频率(大约28hz),在空转频率中机组运行最安静。
4.在具有转速调节的捣固机器中,相位稳定也是已知的。在此,在空转中,所有振动发生器的转速被同步,并且旋转驱动器的相应的相移被设置为,使得振动重叠被最小化。
5.旋转振动驱动器也可以用于线路工程用机械的其他的作业机组中。例如,wo 2008/009314 a1公开了所谓的轨道稳定器,其中,具有旋转不平衡的稳定机组处于振动中。在此,两个同步的稳定机组以可调节的振动频率运行。
6.此外,由hauke r.等人的文献:道床清洗机械概览,ei
‑
轨道机械和设备,2016年5月,第30至35页已知具有不同的筛网设施的道床清洗机器。在此,同样使用具有可调节的振动频率的旋转驱动器。
技术实现要素:
7.本发明所要解决的技术问题在于,改进上述类型的方法,从而可以利用快速的变化检测来精确地确定频率或周期时间。此外,本发明所要解决的技术问题在于,提供一种相应的用于实施改进的方法的设备。
8.根据本发明,这些技术问题通过独立权利要求1和11的特征来解决。本发明的有利的扩展方案由从属权利要求得到。
9.在此,针对所述测量参量形成时间离散的测量值的序列,并且借助计算单元实施这些测量值的自相关,以用于确定所述频率或周期时间。由此,与具有交零检测的传统方法相比,也可以在两个交零之间精确检测频率变化。利用检测的时间离散的测量值,在任何时间可以确定自相关函数的函数值。相应的函数计算的结果是关于时间轴的函数值。在时间轴上,在零与首先出现的最大值之间的时间段说明了测量参量的曲线函数的周期时间。因此,利用每个新检测的测量值可以立即实施频率的重新确定。
10.在本发明的扩展方案中,通过另外的传感器检测根据另外的驱动器的旋转得出的另外的测量参量,该另外的测量参量具有近似周期性的曲线函数,其中,针对另外的测量参量形成另外的时间离散的测量值的序列,并且其中,借助计算单元实施两个测量参量的测量值的交叉相关,以用于确定相移。通过可在任何时间实施的交叉相关可以立即识别预设的相移的偏差。因此确保多个旋转驱动器的精确同步(相位稳定)。
11.有利的是,为了形成时间离散的测量值而预设周期时间,其中,所述周期时间确定评估周期。以这种方式,利用每个重新检测的测量值实施对频率或周期时间和必要时相移的评估。该方法的精度在此随着周期时间的减小而升高。
12.另外的改进规定,利用每个新的测量值通过相同数量的测量值乘积的求和,迭代地计算出相关函数的函数值。由此,限制了计算耗费并且提供进一步的简化的可能性。
13.在此尤其有意义的是,针对函数值的当前的计算,从先前计算的测量值乘积的总和中减去具有最早的测量值的测量值乘积,并且加上具有当前的测量值的新的测量值乘积。以这种方式,只需要很少的计算运行,便可更新相关函数的函数值。由于对计算性能的低要求,可以利用廉价的和节约空间的计算单元几乎实时地实施计算。
14.另外的改进规定,在计算相关函数的函数值之前确定插入的测量值。通过附加的测量值在给定的后续值之间的插入,可以更精确地确定相关函数的最大值的位置。以这种方式,可以更精确地确定频率或周期时间。
15.在计算相关函数的函数值之前过滤测量值,由此进一步提高了频率确定的质量。例如,通过所谓的无限脉冲响应滤波器(四阶iir带通滤波器)进行测量信号准备。在此,高通消除了信号的稳定分量,而低通减弱并且消除了信号中的高频干扰。iir滤波器此外具有以下优点,即与其他的数字滤波器类型(例如fir滤波器)不同,其具有明显更少的计算运行。该特性在此是有用的,因为对计算单元的计算性能的要求是有限的。
16.所述方法也以如下方式改进,即在确定相关函数的最大值之前,确定插入的函数值。有意义地,插入仅在极值周围的范围内被插入,以便能够更精确地确定极值的位置。由此,可以以更少的计算工作实现更高的精度。
17.在本发明的有利的实现方案中,所述传感器的敏感元件与利用驱动器驱动的偏心轴的距离被检测作为测量参量。由于在通过相关函数确定频率期间的误差容限,在此不需要精确安装传感器或校准过程。如果驱动器驱动由铁磁材料制成的偏心轴,那么可以使用电感式距离传感器,无需附加地调整旋转部件。
18.备选的实现方案规定,随驱动器转动的磁场的作用于传感器的场强被检测作为测量参量。在此,被驱动的轴被磁化,或补充有磁铁,以便产生旋转磁场。即使在安置磁铁的情况下,附加的空间需求也是很小的。通过轴附近的合适的传感器检测在轴旋转期间变化的场强。
19.根据本发明的用于实施所述方法之一的设备具有用于检测根据驱动器的旋转得出的测量参量的传感器,该测量参量具有近似周期性的曲线函数,所述设备还具有用于确定曲线函数的频率或周期时间的评估装置和用于可调节地控制所述驱动器的控制装置。在此,向计算单元提供测量参量的时间离散的测量值,其中,在所述计算单元中设置有算法,所述算法用于实施这些测量值的自相关,以确定所述频率或周期时间。由此,可以利用每个新检测的测量值立即实施精确的频率确定。
20.在改进的设备中布置有另外的传感器,用于检测根据另外的驱动器的旋转得出的另外的测量参量,其中,向所述计算单元提供另外的测量参量的时间离散的测量值,并且其中,在所述计算单元中设置有算法,用于实施两个测量参量的测量值的交叉相关,以用于确定相移。由此实现了用于相位稳定的简单的布置方式。
21.为了实现具有少量和紧凑的部件的设备而有意义的是,所述计算单元是微处理器。在此,使用优化的算法并有效实现信号处理路径,以便使计算性能适配于微处理器的特性连同有限的工作存储器。
22.有利地,具有通信接口的计算单元布置在第一结构组件中,其中,针对所述驱动器,自身的结构组件与所述第一结构组件耦连,所述自身的结构组件包括电力电子器件、调节单元和通信接口。分离的结构组件能够实现设备的简单缩放。以这种方式,所述计算单元可以用于确定多个驱动器的频率或周期时间。
23.为了有效地检测测量参量而有利的是,所述传感器包括用于电容地或电感地或磁性地检测测量参量的敏感元件。安装传感器不存在特殊要求,因为传感器信号的幅度的偏差和精确值都与进一步处理无关。
附图说明
24.以下以示例性的方式参照附图阐述本发明。在附图中:
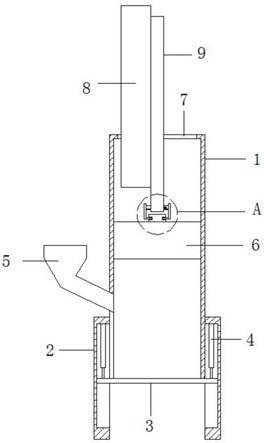
25.图1示出具有捣固机组的线路工程用机械的示意图;
26.图2示出具有稳定机组的线路工程用机械的示意图;
27.图3示出捣固机组的侧视示意图;
28.图4示出剖切轨道和捣固机器所得的剖面示意图;
29.图5示出具有距离测量的传感器的示意图;
30.图6示出具有场强测量的传感器的示意图;
31.图7示出测量值;
32.图8示出相关函数;
33.图9示出函数项的形成;
34.图10示出系统示意图;
35.图11示出具有结构组件的系统示意图;
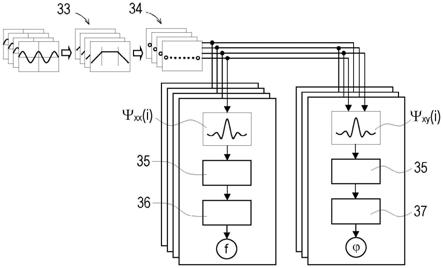
36.图12示出信号处理示意图。
具体实施方式
37.图1所示的线路工程用机械1是捣固机器并且包括可在轨道行走机构2上行进的机器框架3。在机器框架3上布置有捣固机组作为作业机组4。捣固机器用于对轨道5进行处理,其中,固定在轨枕6上的钢轨7支承在碎石道床8上。在捣固过程中,由轨枕6和钢轨7形成的轨道联组借助升降矫正机组9和测量系统10提升到额定位置中,并且必要时侧向移动。为了固定该位置,作业机组4的振动的捣固工具11伸入碎石道床8中。伸入的捣固工具11被相对彼此进给,并且在此压实被提升的轨枕6下方的碎石。
38.为了产生振动,捣固工具11与振动发生器12耦连。振动发生器12包括旋转驱动器13,该旋转驱动器驱动偏心轴14。进给驱动器15支承在偏心轴14上。在偏心轴14旋转时,偏
心轴的偏心性产生期望的振动幅度。
39.在捣固过程后,轨道5通常被稳定,以便减少沉降。为此使用图2所示的线路工程用机械1。在此涉及动态轨道稳定器(dgs),其具有两个作为作业机组4的稳定机组。每个稳定机组包括具有借助旋转驱动器13驱动的转动不平衡的振动发生器12。主动的振动发生器12使稳定机组横向于轨道纵向地振动。在此,具有滚轮式夹钳16的稳定机组扣紧轨道5的钢轨7,由此将振动传递到轨道联组。这导致轨道联组在碎石道床8中振颤。
40.不仅在捣固过程中,而且也在稳定过程中,并且在另外的在轨道施工中使用振动发生器12时,产生的振动应该相应于不同的预设。例如,为了优化碎石压实,预设35hz的振动频率。对于捣固工具11的伸入过程,大约45hz的更高的频率f是期望的,以便减小伸入阻力。在碎石道床8外部,频率f应该是更小的,以便减小噪声污染。
41.参考图3和4中的作业机组4阐述另外的要求。作业机组4包括四个捣固单元17,它们可以通过高度调节驱动器彼此独立地下降到碎石道床8中。在每个捣固单元17中,相对置的捣固工具11通过进给驱动器15与自身的振动发生器12耦连。通过共同的控制装置18控制振动发生器12。针对产生的振动,除了频率f以外还预设彼此间的相移捣固单元的镜像对称通常是期望的,以便使反作用到机器框架3上的振动和噪音最小化。
42.为了控制/调节振动发生器12中的旋转驱动器13而需要,持续检测频率f或周期时间t。此外,在轨道施工中存在对传感器装置的稳固性的高要求。众所周知,对过零的评估具有以下缺点,即由此较晚地识别频率变化。因此根据本发明规定,通过自相关来确定频率f或周期时间t。以此为基础形成测量参量x,该测量参量代表所产生振动的近似周期性的函数变化曲线。
43.为此布置有传感器19,其与振动发生器12磁耦合、电感耦合或电容耦合。例如,图5所示的距离传感器19包括敏感元件,其通过电感耦合测量与偏心轴14的偏心周面的距离。在偏心轴14旋转时改变的距离是测量参量x,其近似周期性的变化曲线随后被评估。
44.备选地,在图6中布置有振动发生器12的磁部件20,其通过旋转驱动器13转动。在此,产生旋转磁场,该旋转磁场通过固定的传感器19被检测。在该变型方案中,在旋转期间变化的场强作为测量参量x被检测和评估。
45.图7示出测量参量x(或针对另外的振动发生器12的y)的示例性的处理。在上方的图表中示出了随时间t的测量参量变化曲线。在此,它是近似周期性的曲线函数,其中,由于外部的影响而可能出现干扰。以下的方法步骤的目标是确定周期时间t或频率f=1/t。针对测量参量x,在第二图表中检测测量值x
i
(或针对另外的振动发生器12的y
i
),其中,通过周期时间预设测量值x
i
之间的时间间隔。为此,要么进行传感器19的周期性的查询,要么通过模数转换器从模拟传感器信号形成时间离散的测量值x
i
的序列(具有下标i的序列值)。
46.有利地,通过数字滤波器识别和消除不正确的测量值x
f
。此外有意义的是,通过例如四阶的iir滤波器改进传感器信号。在此,二阶的高通去除稳定分量,而二阶的低通减弱信号的高频干扰。
47.在下一步骤中,进行测量值变化曲线的插入,以便获得用于形成自相关函数ψ
xx
(i)的改进的数据基础。例如,在每个检测的测量值x
i
之间插入附加值(图7中的第三图表)。
48.图8示出了自相关函数ψ
xx
(i)的函数值ψ
i
的示例性的变化曲线。在此,自相关函数ψ
xx
(i)的值ψ
i
从测量值乘积x
n
·
x
n
‑
i
的求和如下地得到:
49.ψ
xx
(i)=∑
n
x
n
·
x
n
‑
i
50.对于本发明有意义的是,针对每个函数值ψ
i
,求和相同数量的测量值乘积。
51.有利地,通过自相关函数ψ
xx
(i)的新计算,对频率f或周期时间t的评估在由周期时间预设的每个周期中发生。为此,在函数值的当前的计算中,从先前的计算的测量值乘积的总和中减去具有最早的测量值的测量值乘积,并且加上具有当前的测量值的新的测量值乘积:
52.∑
(i,t 1)
=∑
(i,t)
x
(2n
‑
i,t)
·
x
(2n,t)
x
(0,t)
·
x
(i,t)
53.在图9中说明相应的求和。通过这种简单的迭代的处理方式可以以有限的计算性能几乎实时实施持续计算自相关函数ψ
xx
(i)。
54.在优化步骤中,从函数值ψ
i
的在图8的上方的图表中示出的变化曲线插入另外的函数值。在下方的图表中可看到结果。因为要确定的周期时间t由第一最大值的位置(零除外)确定,所以有意义地仅在该范围内实施插入。该待预期的范围通常通过轨道施工中的预设的频率已知。
55.为了实施所说明的方法步骤,计算单元22布置在评估装置21中。在此,在图10中的系统图中,向计算单元22输送受控的作业机组4的多个振动发生器12的测量值x
i
。在输出侧,通过相关联的功率等级23来控制作业机组4的各个驱动器13。
56.该系统结构在图11中更详细地示出。第一结构组件24包括计算单元22、模数转换器25、预处理单元26和通信接口27。传感器19的测量信号通过预处理单元26和模数转换器25被预处理用于计算单元22。具体地,形成时间离散的测量值序列,其代表相应的周期性的测量值变化曲线。
57.计算单元22通过通信接口27与配置和诊断单元28以及控制器29连接,以用于预设一般的控制命令。此外,针对每个振动发生器12设置自身的结构组件30,该结构组件通过通信接口27与计算单元22耦连。在此,每个结构组件30均包括调节单元31和用于控制相关联的驱动器13的电力电子器件32。
58.针对作业机组4的四个受控的/调节的振动发生器12,图12示出了测量信号或测量值x
i
的示例性的处理。每个振动发生器均配有传感器19,用于产生针对相应的测量参量x的周期性变化曲线。由此,利用相应的滤波33和扫描速率转换34形成测量值序列。
59.由振动发生器12的测量值序列持续形成自相关函数ψ
xx
(i),以用于确定相应当前的频率f。由此,借助极值确定35进行频率确定36。
60.对于相应两个振动发生器12,相关联的相移的确定平行地进行三次。为此,首先从两个测量值序列形成交叉相关。利用一个振动发生器12的测量值x
i
和另一振动发生器12的测量值y
i
产生以下交叉相关函数:
61.ψ
xy
(i)=∑
n
=x
n
·
y
n
‑
i
62.从交叉相关函数ψ
xx
(i)的相应持续形成的变化曲线,通过极值确定35进行相应的相移确定37。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。