1.本发明涉及雷达的距离分辨,具体为一种基于lfm回波信号频域去斜和压缩感知的雷达距离超分辨方法。
背景技术:
2.距离分辨率是雷达系统的一个重要指标,提高距离分辨能力是雷达目标检测、成像、以及分类识别的基础。雷达通常发射大时宽带宽积信号,通过匹配滤波或相关处理提高距离分辨能力,此时距离分辨率δr=c/(2b),δr又称为常规距离分辨的瑞利限,若要进一步改善距离分辨率,则需要增加信号带宽b,这在实际中经常难以实现,因此在不增加信号带宽b的情况下研究距离超分辨方法具有重要意义。
3.因此,本发明提供一种基于lfm回波信号频域去斜和压缩感知的雷达距离超分辨方法,用来实现距离超分辨。
技术实现要素:
4.本发明的目的在于提供一种基于lfm回波信号频域去斜和压缩感知的雷达距离超分辨方法,在雷达信号带宽相同的条件下,本发明突破了常规距离分辨的瑞利限,实现了距离超分辨;距离超分辨改善了雷达目标检测、成像、以及分类识别的性能。
5.为达到上述目的,根据本发明的一个方面,本发明提供如下技术方案:
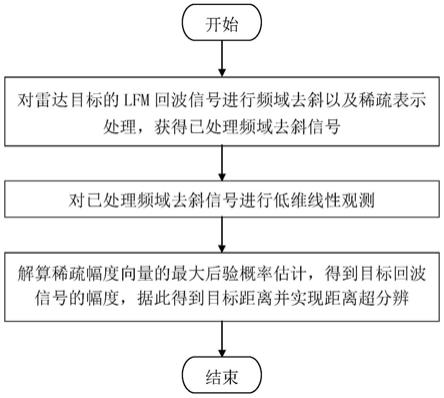
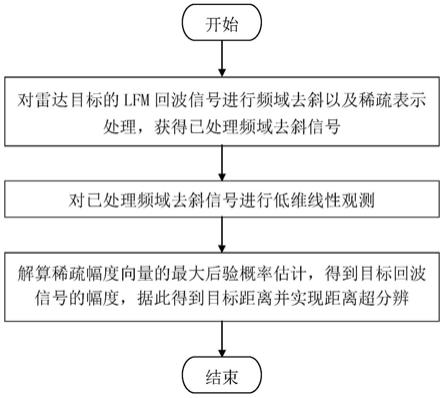
6.基于频域去斜和压缩感知的雷达距离超分辨方法,包括以下步骤:
7.1)对雷达目标的线性调频回波信号即lfm回波信号进行频域去斜以及稀疏表示处理,获得已处理频域去斜信号;
8.2)对已处理频域去斜信号进行低维线性观测;
9.3)对已处理频域去斜信号中未知的稀疏幅度向量,解算其最大后验概率估计,得到目标回波信号的幅度,据此得到目标距离并实现雷达距离超分辨。
10.本发明进一步设置为:所述步骤1)对雷达目标的线性调频回波信号即lfm回波信号进行频域去斜以及稀疏表示处理,获得已处理频域去斜信号,具体为,
[0011]1‑
1)设雷达发射的lfm信号u(t)为,
[0012][0013]
式中,t为时间,a0为lfm信号的幅度,t0为lfm信号的时宽,j为虚数单位,j2=
‑
1,γ为lfm信号的调频斜率,γ=b/t0,b为lfm信号的带宽,rect(
·
)为矩形函数,rect(t)=1,
‑
1/2≤t≤1/2;
[0014]1‑
2)设雷达探测距离上有m个静止点目标,这m个静止点目标的回波信号s
e
(t)为,
[0015]
[0016]
式中,a
m
为第m个静止点目标回波信号的幅度,m=1,2,...,m,m为自然数,t
m
=2r
m
/c为第m个静止点目标回波信号的双程时延,r
m
为第m个静止点目标的距离,c为光速;
[0017]1‑
3)对式(2)进行采样,令t
m
=p
m
t
s
,p
m
为正整数,t
s
为采样周期,则式(2)的数字域表达式s
e
(l)为,
[0018][0019]
式中,l=(t
r
‑
t0)/t
s
为数字域上lfm回波信号的长度,t
r
为雷达的脉冲重复周期;
[0020]1‑
4)取正整数其中表示向上取整,利用快速傅里叶变换计算lfm回波信号的频谱,则式(3)的频域表达式s
e
(k)为,
[0021][0022]
式中,w=exp(
‑
j2π/k)是一个已知的中间参量,u(k)为单位幅度lfm信号的离散频谱;
[0023]1‑
5)取u(k)的复共轭并与式(4)相乘以实现lfm信号的频域去斜,得到频域去斜后的信号表达式s(k)为,
[0024][0025]
式中,u
*
(k)为u(k)的复共轭,为频域去斜后第m个静止点目标回波信号的幅度;
[0026]1‑
6)设采样周期t
s
=1/(qb),其中正整数q>1,此时对于式(5)频域去斜后的信号表达式s(k)来说,信号仅位于中间的个频率点则得到频谱中间个频率点上的信号表达式为,
[0027][0028]
式中,为频谱中间个频率点上的第m个静止点目标回波信号的幅度;
[0029]1‑
7)将式(6)中的频域去斜信号表示成矩阵形式,则得矩阵表达式s为,
[0030][0031]
式中,是一个已知的字典矩阵,是已处理频域去斜信号中未知的稀疏幅度向量,其中非零元素是各个目标回波信号的幅度,零元素表示没有目标,由于中仅有少量的非零元素,因此它是稀疏的,其中非零元素的位置代表了目标的距离;
[0032]1‑
8)雷达接收信号在考虑背景噪声的情况下,得已处理频域去斜信号为,
[0033][0034]
式中,n为背景噪声。
[0035]
本发明进一步设置为:所述步骤2)对已处理频域去斜信号进行低维线性观测,具体为,
[0036]
设φ:是一个观测矩阵,n为自然数,它的每个元素都独立地服从均值为零、方差为的高斯分布,用观测矩阵φ对已处理频域去斜信号执行线性观测,得到低维的线性观测向量为,
[0037][0038]
式中,ω=φψ是一个已知的中间矩阵,是观测噪声。
[0039]
本发明进一步设置为:所述步骤3)对已处理频域去斜信号中未知的稀疏幅度向量,解算其最大后验概率估计,得到目标回波信号的幅度,据此得到目标距离并实现雷达距离超分辨,具体为,
[0040]3‑
1)设是均值为零、方差为σ2的高斯噪声向量,则得到低维的线性观测向量的似然函数为,
[0041][0042]
式中,||
·
||表示欧几里得范数;
[0043]3‑
2)记上标t表示转置,
[0044]
设中各元素都是独立的随机变量,服从均值为零、方差为g
i
的高斯分布,则有先验函数为,
[0045][0046]
式中,方差向量g=[g1,g2,...,g
k
]
t
,其中各元素都是未知参数;
[0047]3‑
3)利用式(10)和式(11)可以得到参数g和σ2的似然函数为,
[0048][0049]
式中,σ
z
=σ2i
n
ω
h
gω为的协方差矩阵,i
n
为n阶单位阵,g=diag(g),diag(
·
)表示对角化,上标h表示共轭转置;
[0050]
通过求解式(12)的最大值,可以得到σ2的最大似然估计以及g的最大似然估计g
ml
;
[0051]3‑
4)利用贝叶斯公式,可以得到的后验概率密度函数为,
[0052][0053]
式中,为的均值向量,σ
a
=(σ
‑2ω
h
ω g
‑1)
‑1为的协方差矩阵;
[0054]3‑
5)将步骤3
‑
3)得到的和g
ml
代入式(13),然后求导,得到的最大后验概率
估计为,
[0055][0056]
式中,向量的非零元素为各个目标信号的幅度,零元素表示没有目标,因此,经过上述处理后就得到了各个目标的距离并实现雷达距离超分辨。
[0057]
与现有技术相比,本发明具有的有益之处是:
[0058]
(1)在雷达信号带宽相同的条件下,本发明突破了常规距离分辨的瑞利限,实现了距离超分辨,具有更高的距离分辨能力。
[0059]
(2)本发明的距离超分辨改善了雷达目标检测、成像、以及分类识别的性能。
附图说明
[0060]
图1为本发明基于lfm频域去斜和压缩感知的雷达距离超分辨方法的流程图;
[0061]
图2为常规脉压的距离分辨与本发明距离超分辨的比较图;
[0062]
图3为本发明超分辨方法的距离超分辨概率与信噪比的关系图。
具体实施方式
[0063]
下面结合说明书附图,对本发明作进一步的说明。
[0064]
本发明提供了一种基于lfm回波信号频域去斜和压缩感知的雷达距离超分辨方法,在雷达信号带宽相同的条件下,本发明突破了常规距离分辨的瑞利限,实现了距离超分辨;距离超分辨改善了雷达目标检测、成像、以及分类识别的性能。
[0065]
一种基于lfm回波信号频域去斜和压缩感知的雷达距离超分辨方法,如图1所示,包括以下步骤:
[0066]
1)对雷达目标的线性调频回波信号即lfm回波信号进行频域去斜以及稀疏表示处理,获得已处理频域去斜信号;
[0067]
具体为,
[0068]1‑
1)设雷达发射的lfm信号u(t)为,
[0069][0070]
式中,t为时间,a0为lfm信号的幅度,t0为lfm信号的时宽,j为虚数单位,j2=
‑
1,γ为lfm信号的调频斜率,γ=b/t0,b为lfm信号的带宽,rect(
·
)为矩形函数,rect(t)=1,
‑
1/2≤t≤1/2;
[0071]1‑
2)设雷达探测距离上有m个静止点目标,这m个静止点目标的回波信号s
e
(t)为,
[0072][0073]
式中,a
m
为第m个静止点目标回波信号的幅度,m=1,2,...,m,m为自然数,t
m
=2r
m
/c为第m个静止点目标回波信号的双程时延,r
m
为第m个静止点目标的距离,c为光速;
[0074]1‑
3)对式(2)进行采样,令t
m
=p
m
t
s
,p
m
为正整数,t
s
为采样周期,则式(2)的数字域
表达式s
e
(l)为,
[0075][0076]
式中,l=(t
r
‑
t0)/t
s
为数字域上lfm回波信号的长度,t
r
为雷达的脉冲重复周期;
[0077]1‑
4)取正整数其中表示向上取整,利用快速傅里叶变换计算lfm回波信号的频谱,则式(3)的频域表达式s
e
(k)为,
[0078][0079]
式中,w=exp(
‑
j2π/k)是一个已知的中间参量,u(k)为单位幅度lfm信号的离散频谱;
[0080]1‑
5)取u(k)的复共轭并与式(4)相乘以实现lfm信号的频域去斜,得到频域去斜后的信号表达式s(k)为,
[0081][0082]
式中,u
*
(k)为u(k)的复共轭,为频域去斜后第m个静止点目标回波信号的幅度;
[0083]1‑
6)设采样周期t
s
=1/(qb),其中正整数q>1,此时对于式(5)频域去斜后的信号表达式s(k)来说,信号仅位于中间的个频率点则得到频谱中间个频率点上的信号表达式为,
[0084][0085]
式中,为频谱中间个频率点上的第m个静止点目标回波信号的幅度;
[0086]1‑
7)将式(6)中的频域去斜信号表示成矩阵形式,则得矩阵表达式s为,
[0087][0088]
式中,是一个已知的字典矩阵,是已处理频域去斜信号中未知的稀疏幅度向量,其中非零元素是各个目标回波信号的幅度,零元素表示没有目标,由于中仅有少量的非零元素,因此它是稀疏的,其中非零元素的位置代表了目标的距离;
[0089]1‑
8)雷达接收信号在考虑背景噪声的情况下,得已处理频域去斜信号为,
[0090][0091]
式中,n为背景噪声。
[0092]
2)对已处理频域去斜信号进行低维线性观测;
[0093]
具体为,
[0094]
设φ:是一个观测矩阵,n为自然数,它的每个元素都独立地服从均值为零、方差为的高斯分布,用观测矩阵φ对已处理频域去斜信号执行线性观测,得到低维的线性观测向量为,
[0095][0096]
式中,ω=φψ是一个已知的中间矩阵,是观测噪声。
[0097]
3)对已处理频域去斜信号中未知的稀疏幅度向量,解算其最大后验概率估计,得到目标回波信号的幅度,据此得到目标距离并实现雷达距离超分辨;
[0098]
具体为,
[0099]3‑
1)设是均值为零、方差为σ2的高斯噪声向量,则得到低维的线性观测向量的似然函数为,
[0100][0101]
式中,||
·
||表示欧几里得范数;
[0102]3‑
2)记上标t表示转置,
[0103]
设中各元素都是独立的随机变量,服从均值为零、方差为g
i
的高斯分布,则有先验函数为,
[0104][0105]
式中,方差向量g=[g1,g2,...,g
k
]
t
,其中各元素都是未知参数;
[0106]3‑
3)利用式(10)和式(11)可以得到参数g和σ2的似然函数为,
[0107][0108]
式中,σ
z
=σ2i
n
ω
h
gω为的协方差矩阵,i
n
为n阶单位阵,g=diag(g),diag(
·
)表示对角化,上标h表示共轭转置;
[0109]
通过求解式(12)的最大值,可以得到σ2的最大似然估计以及g的最大似然估计g
ml
;
[0110]3‑
4)利用贝叶斯公式,可以得到的后验概率密度函数为,
[0111][0112]
式中,为的均值向量,σ
a
=(σ
‑2ω
h
ω g
‑1)
‑1为的协方差矩阵;
[0113]3‑
5)将步骤3
‑
3)得到的和g
ml
代入式(13),然后求导,得到的最大后验概率
估计为,
[0114][0115]
式中,向量的非零元素为各个目标信号的幅度,零元素表示没有目标,因此,经过上述处理后就得到了各个目标的距离并实现雷达距离超分辨。
[0116]
采用本发明的基于lfm回波信号频域去斜和压缩感知的雷达距离超分辨方法进行仿真,通过仿真实例来验证距离超分辨方法的性能。
[0117]
假设lfm信号的时宽t0=100μs,lfm信号的带宽b=1mhz,因此常规脉压的距离分辨率为δr=150m。设雷达观测距离上有两个大小相等的静止点目标,距离间隔为0.75δr,则这两个目标无法通过常规脉压来分辨。
[0118]
常规脉压的距离分辨率仅取决于信号带宽,但是超分辨方法的距离分辨能力除此之外还与回波信号的信噪比有关。设信噪比为3db,图2示出了两目标超分辨处理的蒙特
‑
卡洛仿真结果,可见两个目标显著地分辨开来。作为比较,图2中还给出了常规脉压的处理结果,由于两个目标靠得太近,它们的脉压主瓣重叠在一起,区分不开。另外,超分辨处理中伪峰的数量少而且幅度小,因此能够更真实地反映目标的距离分布状况。
[0119]
由于超分辨方法的距离分辨能力与回波信号的信噪比有关,因此具有统计性。在前面给定的假设条件下,对于不同的信噪比,图3示出了两个目标的超分辨概率,其中每个概率值都是100次蒙特
‑
卡洛仿真的运行结果。参照文献(liu s.,xiang j.novel method for super
‑
resolution in radar range domain.iee proc.radar sonar navig.,1999,146,(1),pp.40
‑
44.),在1次蒙特
‑
卡洛仿真中,要求同时满足以下两个条件才称两目标是可分辨的:
①
对超分辨方法得到的目标幅值进行归一化处理,大于0.5的尖峰的个数等于2;
②
目标超分辨估计位置与其真实位置的偏差不超过
±
δr/6。
[0120]
与所期望的结果一样,由图3可见:在常规脉压无法分辨两个目标的情况下,本发明可以依照一定的概率实现目标的距离超分辨;目标的超分辨概率随信噪比的提高而提高。
[0121]
以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。