一种自适应的gnss载波相位差分滑坡监测方法
技术领域
1.本发明涉及卫星导航定位技术领域,尤其涉及一种自适应的gnss载波相位差分滑坡监测方法。
背景技术:
2.随着全球卫星导航系统(gnss,globalnavigation satellite system)的发展,高精度差分定位技术已广泛应用于山体滑坡等高精度监测领域。传统高精度差分定位技术通常构建载波相位双差观测方程通过卡尔曼滤波技术求的高精度定位结果,但当观测环境较差时使用传统卡尔曼滤波技术与全部模糊度固定的方法,通常会出现周跳频繁、固定困难、精度达不到要求等情况。。
技术实现要素:
3.本发明的目的在于提供一种自适应的gnss载波相位差分滑坡监测方法,旨在解决传统高精度差分定位技术在恶劣观测环境下的固定率及定位精度较差的技术问题。
4.为实现上述目的,本发明采用一种自适应的gnss载波相位差分滑坡监测方法,包括下列步骤:
5.步骤1、在监测区域放置参考站接收机和监测站接收机,接收gnss观测数据,获得观测到的卫星数据;
6.步骤2、根据所述gnss观测数据计算监测站接收机的位置,并计算每颗卫星仰角;
7.步骤3、选取参考站与监测站间的共视卫星,构建载波相位双差观测方程;
8.步骤4、求解所述载波相位双差观测方程,计算得到监测站位置及站间单差整周模糊度的浮点状态矩阵和浮点状态协方差矩阵;
9.步骤5、筛选站间单差整周模糊度并进行单差转双差处理,搜索整周模糊度的最优估计值;
10.步骤6、对所述最优估计值判定确认,输出整周模糊度固定解或浮点解;
11.步骤7、将双差模糊度恢复成单差模糊度,进入下一历元解算。
12.其中,观测到的卫星数据包括卫星的伪距、载波相位和载噪比。
13.其中,在根据所述gnss观测数据计算监测站接收机的位置,并计算每颗卫星仰角的过程中,根据接收到的gnss观测数据,使用单点定位计算监测站接收机的位置,为抗差卡尔曼滤波的时间更新过程提供位置初始值,并计算每颗卫星仰角。
14.其中,在步骤4中,具体为:使用抗差卡尔曼滤波算法进行时间和状态的更新,包括下列步骤:
15.统计当前历元连续锁定历元数大于设定值的卫星占卫星总数的比例,
16.当比例大于或等于设定值时,采用连续解算模式;
17.当比例小于设定值时,采用单历元解算模式;
18.根据时间更新过程的状态预测值及观测值,得到新的浮点状态矩阵和浮点状态协
方差矩阵。
19.统计当前历元连续锁定历元数大于设定值的卫星占卫星总数比例的计算为抗差卡尔曼的时间更新,根据根据时间更新过程的状态预测值及观测值可以进行抗差卡尔曼的状态更新。
20.其中,所述连续解算模式的更新过程包括下列步骤:
21.若当前历元为首历元,则根据监测站单点定位位置及载波相位单差初始值来初始化浮点状态矩阵和浮点状态协方差矩阵;
22.若当前历元为非首历元且上一历元的解为固定解,则根据上一历元的固定解状态矩阵和状态协方差矩阵来更新当前历元的浮点状态矩阵和浮点状态协方差矩阵;
23.若当前历元为非首历元且上一历元的解为浮点解,则根据上一历元的浮点解状态矩阵和状态协方差矩阵来更新当前历元的浮点状态矩阵及浮点状态协方差矩阵。
24.其中,采用所述单历元解算模式的更新时,根据当前历元监测站单点定位位置及载波相位单差初始值来更新浮点状态矩阵和浮点状态协方差矩阵,并且增加滤波迭代次数。
25.其中,在筛选站间单差整周模糊度并进行单差转双差处理,搜索整周模糊度的最优估计值的过程中,包括下列步骤:
26.将各卫星剔除标志置0;
27.根据预设的卫星仰角门限值、载噪比门限值以及卫星连续锁定历元数门限值,将低于门限值的卫星剔除标志置1;
28.将卫星剔除标志为0的卫星在状态矩阵中的单差载波相位和状态协方差矩阵中的对应部分提取出来;
29.对提取出来的状态矩阵和状态协方差矩阵进行单差转双差处理;
30.采用mlambda算法搜索整周模糊度的最优估计值。
31.其中,在步骤6中,采用ratio算法对步骤5获得的整周模糊度最优估计值进行确认,判定成功则输出整周模糊度固定解,判定失败则输出浮点解。
32.步骤1至步骤6为单次历元解算过程,步骤7作为连续解算的准备步骤,根据计算要求自适应转回步骤1进入循环解算操作。
33.本发明的一种自适应的gnss载波相位差分滑坡监测方法,通过接收监测站和参考站gnss观测数据,得到观测到的卫星的伪距、载波相位、载噪比,将观测数据中的载波相位观测量作双差组成载波相位双差观测方程组,通过抗差卡尔曼滤波进行解算,得到监测站位置的浮点解,并通过剔除观测质量较差卫星来对载波相位的整周模糊度参数进行筛选,采用mlambda算法搜索整周模糊度,最终得到监测站位置的固定解,另外通过统计所有卫星的连续锁定历元数大于设定值的比例,并与设定比例值比较,自动调整滤波策略,将连续解算与单历元解算的优势结合,保证恶劣观测环境下的固定率及定位精度。
附图说明
34.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以
根据这些附图获得其他的附图。
35.图1是本发明的一种自适应的gnss载波相位差分滑坡监测方法的流程示意图。
36.图2是本发明的一种自适应的gnss载波相位差分滑坡监测方法的具体执行流程图。
37.图3是本发明的抗差卡尔曼滤波过程流程图。
38.图4是本发明的模糊度筛选流程图。
39.图5是本发明的载波相位双差模型示意图。
具体实施方式
40.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
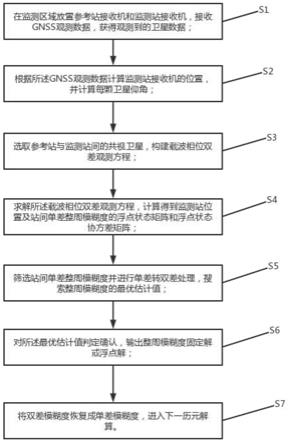
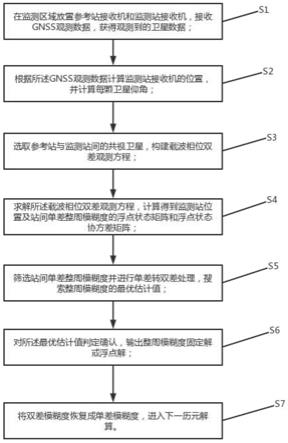
41.请参阅图1,本发明提出了一种自适应的gnss载波相位差分滑坡监测方法,包括下列步骤:
42.s1、在监测区域放置参考站接收机和监测站接收机,接收gnss观测数据,获得观测到的卫星数据;
43.s2、根据所述gnss观测数据计算监测站接收机的位置,并计算每颗卫星仰角;
44.s3、选取参考站与监测站间的共视卫星,构建载波相位双差观测方程;
45.s4、求解所述载波相位双差观测方程,计算得到监测站位置及站间单差整周模糊度的浮点状态矩阵和浮点状态协方差矩阵;
46.s5、筛选站间单差整周模糊度并进行单差转双差处理,搜索整周模糊度的最优估计值;
47.s6、对所述最优估计值判定确认,输出整周模糊度固定解或浮点解;
48.s7、将双差模糊度恢复成单差模糊度,进入下一历元解算。
49.详细执行流程请参阅图2,所述自适应的gnss载波相位差分滑坡监测方法基于复杂环境下的高精度要求,采用抗差卡尔曼滤波与部分模糊度固定策略,并根据所有卫星的周跳情况将滤波策略调整,使得单历元解算对周跳不敏感和连续解算的高精度优势充分结合,保证恶劣观测环境下的固定率及精度。
50.以下本发明基于实施步骤和具体参数进一步说明:
51.步骤s1:通过放置在监测区域的参考站接收机和监测站接收机,同时接收gnss观测数据,得到观测到的卫星的伪距与载波相位与载噪比与
52.步骤s2:根据接收到的gnss数据,使用单点定位计算监测站接收机的位置(x
s,r
,y
s,r
,z
s,r
),为抗差卡尔曼滤波的时间更新过程提供位置初始值,并计算每颗卫星仰角el
i
;
53.具体地,计算监测站接收机位置的单点定位数学表达式为:
[0054][0055]
[0056]
其中,表示监测站接收机观测到的卫星i的伪距值;表示监测站与卫星i的几何距离;δt
moni
表示监测站接收机钟差,为待求量;δt
i
表示卫星i的钟差,可通过星历参数求得;i、t分别表示电离层误差和对流层误差,可通过建模得到;表示伪距的随机性噪声误差;(x
s,r
,y
s,r
,z
s,r
)表示待求的监测站接收机位置;可通过卫星i的星历求得,表示卫星i的位置。
[0057]
根据数学表达式可知,由于有4个未知参数,包括3个接收机位置参数和1个接收机钟差参数,则至少观测到4颗卫星组成方程组后,即可得到单点定位结果,解算方法可采用最小二乘法。
[0058]
具体地,计算各颗卫星仰角el
i
的数学表达式为:
[0059][0060][0061][0062][0063]
其中,(δx,δy,δz)为观测向量,s为变换矩阵,el
i
为卫星i的仰角,lat和lon分别为监测站接收机坐标对应的纬度和经度,可由接收机坐标(x
s,r
,y
s,r
,z
s,r
)经坐标变换得到。
[0064]
步骤s3:选取参考站与监测站间的共视卫星i,构建载波相位双差观测方程;
[0065]
具体地,对于共视卫星i,监测站接收机和参考站接收机的载波相位观测值分别可表示为:
[0066][0067][0068]
其中,和分别表示监测站接收机和参考站接收机的载波相位观测值;λ表示波长;f表示频率;和分别表示监测站接收机和参考站接收机与共视卫星i的几何距离,计算方法同式(2);δt
moni
和δt
ref
分别表示监测站接收机钟差和参考站接收机钟差;δt
i
表示共视卫星i的卫星钟差;i
moni
、i
ref
和t
moni
、t
ref
表示监测站和参考站的电离层及对流
层误差;和分别表示监测站接收机和参考站接收机对卫星i观测时载波相位的整周模糊度;和表示载波相位观测的随机性噪声误差。
[0069]
假设共视卫星i为当前历元仰角最高的卫星,将其作为参考为卫星。对于共视卫星i,在载波相位观测值和之间作站间单差,得到站间单差值再对于共视卫星j,在载波相位观测值和同样作站间单差得到可消除卫星钟差,短基线情况下可消除电离层误差及对流层误差。
[0070][0071][0072]
在两颗卫星i和j的站间单差值之间作差,得到双差载波相位观测方程:
[0073][0074]
经过双差后,可以进一步消除原观测方程中的接收机钟差以及部分随机误差。
[0075]
步骤s4,使用抗差卡尔曼滤波算法求解载波相位双差观测方程,计算得到监测站位置及站间单差整周模糊度的浮点状态矩阵和浮点状态协方差矩阵;
[0076]
具体地,如图3所示,首先,统计当前历元连续锁定历元数大于设定值的卫星占卫星总数的比例rlock,将比例rlock与设定值rlockmin进行比较,根据比较结果,抗差卡尔曼滤波的时间更新过程分为两种情况。
[0077]
情况1、比例rlock小于设定值rlockmin,采用单历元解算模式,增加滤波迭代次数,根据当前历元监测站单点定位位置及载波相位单差初始值来更新浮点状态矩阵及浮点状态协方差矩阵。
[0078]
情况2、比例rlock大于或等于设定值rlockmin,采用连续解算模式,抗差卡尔曼滤波时间更新过程可分为3种情况。
[0079]
情况1、若当前历元为首历元,则根据监测站单点定位位置及载波相位单差初始值来初始化浮点状态矩阵及浮点状态协方差矩阵。
[0080]
情况2、若当前历元为非首历元且上一历元的解为固定解,则根据上一历元的固定解状态矩阵及状态协方差矩阵来更新当前历元的浮点状态矩阵及浮点状态协方差矩阵。
[0081]
情况3、若当前历元为非首历元且上一历元的解为浮点解,则根据上一历元的浮点解状态矩阵及状态协方差矩阵来更新当前历元的浮点状态矩阵及浮点状态协方差矩阵。
[0082]
抗差卡尔曼滤波的状态更新过程:根据时间更新过程的状态预测值及观测值,得到新的浮点估计值及其协方差矩阵,其过程为:
[0083][0084][0085]
[0086][0087][0088]
其中,x
k
为系统的状态向量,k
k
为滤波增益矩阵,z
k
为系统的观测向量,h
k
为观测矩阵,w
k,i
为权因子,v
i
为观测向量z对应的残差向量,为v
i
的均方差,σ0为方差因子,k0和k
i
可根据需要分别取1.5~2.5、3.0~5.0,为等价权阵,为等价协方差阵可由等价权阵求逆得到。
[0089]
步骤s5:对站间单差整周模糊度进行筛选,选择出符合预设条件的站间单差整周模糊度进行单差转双差处理,采用mlambda算法搜索整周模糊度的最优估计值;
[0090]
具体地,如图4所示,为了避免质量较差卫星对整周模糊度的搜索效率的影响,对步骤s4中得到的单差整周模糊度进行筛选。首先将每颗卫星的剔除标志置0,然后将每颗卫星的仰角与预设值进行比较,将小于预设值的卫星剔除标志设置为1,将每颗卫星的载噪比与预设值进行比较,将小于预设值的卫星剔除标志设置为1,将每颗卫星的连续锁定历元数与预设值进行比较,将小于预设值的卫星剔除标志设置为1,然后将卫星剔除标志为0的卫星在状态矩阵中的单差载波相位及协方差阵中的对应部分提取出来,对筛选后的状态矩阵及其协方差矩阵进行单差转双差处理,最后采用mlambda算法搜索整周模糊度的最优估计值。
[0091]
步骤s6:采用ratio算法对步骤s5得到的整周模糊度最优估计值进行确认,判定成功则输出整周模糊度固定解,判定失败则输出浮点解。对模糊度进行确认的公式为:
[0092][0093]
其中,为n为经过抗差卡尔曼滤波之后的模糊度浮点值,q
n
为对应的协方差矩阵,r0为预设的门限值,为步骤5中模糊度的次优值,为步骤5中模糊度的最优值。
[0094]
步骤s7:得到浮点解或者固定解之后,将双差模糊度恢复成单差模糊度,进入下一历元解算,双差模糊度恢复成单差模糊度的数学表达式为:
[0095][0096]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。