1.本发明属于智能交通技术领域,具体涉及一种基于神经网络的车辆队列控制模式切换系统及切换方法。
背景技术:
2.在城市道路驾驶环境中,由于车辆无法提前预知前方车辆的动态变化(加速,减速和换道等),可能会导致车速控制不当,使得车辆队列不稳定的情况时有发生,这意味着更多的交通拥堵,大量的燃油浪费,甚至会引发交通事故,对人生命财产造成重大威胁。
3.针对该问题,目前存在两种主要的技术:一种是基于车载传感器的自适应巡航控制(adaptive cruise control,acc),在acc模式下的每辆车通过车载传感器测量其与前车的相对距离和相对速度信息,辅助驾驶员对车辆进行控制,有助于提高行车的安全性;另一种是基于车
‑
车通信的协作式自适应巡航控制(cooperative adaptive cruise control,cacc),其通过车
‑
车通信实现车辆的协同控制,相比于acc模式,cacc模式能通过通信获得车辆队列中更多的车辆信息,从而进行控制器的设计,在保证车辆安全的前提下,车辆间以更小的车间距行驶,提高道路交通的吞吐量,减小车辆间距波动幅度,降低行车能耗,提高交通效率而对外部干扰的抑制能力也更强。
4.然而,在实际通信网络环境中,对于大规模车辆队列控制系统,通信延时的情况不可避免,对车辆的协同控制也造成了严重的影响。因此,当车辆队列中的车辆发生通信延时,如何设计巡航模式切换策略,使得车辆队列的串稳定性得到补偿,从而使车辆队列的间距不发生较大的波动,保证系统稳定安全运行是亟待解决的问题。
技术实现要素:
5.本发明的目的是为了解决通信延时影响车辆队列稳定性的问题,提出了一种基于神经网络的车辆队列控制模式切换系统及切换方法。
6.本发明的技术方案是:一种基于神经网络的车辆队列控制模式切换系统包括数据采集模块、数据处理模块和控制器切换模块;
7.数据采集模块用于接收当前车辆和前方车辆的数据信息;数据信息包括车辆的速度、水平位置坐标和垂直位置坐标;
8.数据处理模块用于对当前车辆和前方车辆的数据信息进行处理;
9.控制器切换模块用于根据处理后的数据信息,切换当前车辆的控制方式。
10.本发明的有益效果是:本发明的车辆队列控制模式切换系统可以使神经网络处理产生的数据信息更接近前方车辆的真实轨迹信息,并在从cacc控制器方式切换到acc控制器方式时,使得每一辆车只接受前方一辆车的数据信息,从而提高了预测数据的准确性。
11.在本发明实施例中,为了防止系统接收到的车辆行车信息中包含异常的数据,数据处理模块用于将雷达设备接收到的前车行车信息数据进行清洗,其次将清洗后的数据选取80%进行训练,20%进行测试放入到网络中进行训练。为了提高预测数据的准确性,选取
了不同的输入参数进行试验。例如:分别将第一车辆的水平位置坐标、第二车辆的水平位置坐标和垂直位置坐标、第三车辆的水平位置坐标和垂直位置坐标以及车辆的行驶速度作为网络的输入参数,通过改变网络的内部结构,即从单影响变量到多影响变量的转换,进行多次的实验,同时记录每次实验的rmse结果,选取结果值更优的输入情况作为网络的输入参数进行试验预测,使得通过网络处理产生的数据信息更接近前方车辆的真实行驶轨迹信息。
12.控制器切换模块,是当系统感知到车辆行驶的当前区域存在较大的信息延迟时,为了避免车辆队列的不稳定情况更加严重,系统将在头车巡航的阶段(此处不是立即切换),车辆队列中的车辆将采用神经网络输出的数据作为此时车辆的接收数据,替代了车辆前端雷达设备的接收数据。同时系统将采取由cacc控制器切换方式到acc控制器方式,使得每一辆车只接受前方一辆车的数据信息,从而降低了车辆在行驶过程中的系统开销,提高了在通信延时条件下车辆队列的稳定性。
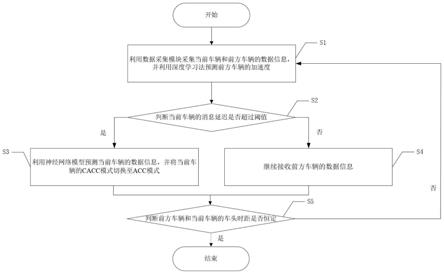
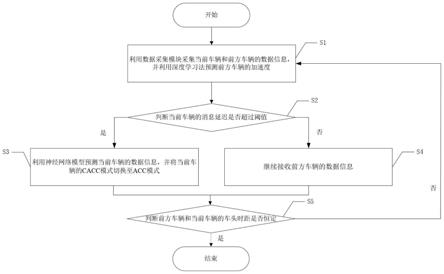
13.基于以上系统,本发明还提出一种基于神经网络的车辆队列控制模式切换方法,包括以下步骤:
14.s1:利用数据采集模块采集当前车辆和前方车辆的数据信息,并利用深度学习法预测前方车辆的加速度;
15.s2:根据当前车辆的数据信息、当前车辆的加速度、前方车辆的数据信息和前方车辆的加速度,利用控制器切换模块判断当前车辆的行驶区域的消息延迟是否超过阈值,若是进入步骤s3,否则进入步骤s4;
16.s3:利用神经网络模型预测当前车辆的数据信息,并将当前车辆的cacc模式切换至acc模式,控制车辆的行驶轨迹,并进入步骤s5;
17.s4:继续接收前方车辆的数据信息,并进入步骤s5;
18.s5:判断前方车辆和当前车辆的车头时距是否恒定,若是则完成车辆队列控制,否则返回步骤s1。
19.进一步地,步骤s2中,判断当前车辆的行驶区域是否存在消息延迟的具体方法为:若当前车辆的响应信号和前方车辆的响应信号满足||λ
i
(t)||2≤||λ
i
‑1(t)||2,则当前车辆的行驶区域存在消息延迟,其中,λ
i
(t)表示当前第i辆车的响应信号,λ
i
‑1(t)表示前方第i
‑
1辆车的响应信号,||
·
||2表示信号能量,响应信号包括车辆的间距误差、速度和加速度。
20.进一步地,步骤s3包括以下子步骤:
21.s31:利用数据处理模块对前方车辆的数据信息进行清洗;
22.s32:选取清洗后前方车辆的数据信息的80%对神经网络模型进行训练,选取清洗后前方车辆的数据信息的20%对神经网络模型进行测试,得到神经网络模型的输出数据;
23.s33:将神经网络模型的输出数据作为当前车辆的数据信息,并将当前车辆的cacc模式切换至acc模式。
24.进一步地,步骤s32中,对神经网络模型进行训练的具体方法为:将当前车辆的速度作为神经网络模型的第一输入参数,将当前车辆的速度和水平位置坐标作为神经网络模型的第二输入参数,将当前车辆的速度、水平位置坐标和垂直位置坐标作为神经网络模型的第三输入参数,分别计算第一输入参数、第二输入参数和第三输入参数的均方根误差,利
用最小均方根误差对应的输入参数对神经网络模型进行训练。
25.本发明的有益效果是:本发明在通信延时条件下,基于神经网络预测的方式对车辆队列的控制模式进行切换,降低了车辆在行驶过程中的系统开销,提高了在通信延时条件下车辆队列的稳定性。
附图说明
26.图1为车辆队列控制模式切换方法的流程图;
27.图2为串稳定性较差情况下的加速度曲线图;
28.图3为串稳定性较好情况下的加速度曲线图;
29.图4为lstm三层预测结构示意图;
30.图5为车辆的加速度曲线图;
31.图6为lstm预测1秒后的加速度曲线图;
32.图7为在acc模式下lstm预测1秒后的加速度曲线图。
具体实施方式
33.下面结合附图对本发明的实施例作进一步的说明。
34.在描述本发明的具体实施例之前,为使本发明的方案更加清楚完整,首先对本发明中出现的缩略语和关键术语定义进行说明:
35.acc模式:基于车载传感器的自适应巡航控制(adaptive cruise control),在acc模式下的每辆车通过车载传感器测量其与前车的相对距离和相对速度信息,辅助驾驶员对车辆进行控制,有助于提高行车的安全性。
36.cacc:基于车
‑
车通信的协作式自适应巡航控制(cooperative adaptive cruise control),其通过车
‑
车通信实现车辆的协同控制。
37.本发明提供了一种基于神经网络的车辆队列控制模式切换系统,包括数据采集模块、数据处理模块和控制器切换模块;
38.数据采集模块用于接收当前车辆和前方车辆的数据信息;数据信息包括车辆的速度、水平位置坐标和垂直位置坐标;
39.数据处理模块用于对当前车辆和前方车辆的数据信息进行处理;
40.控制器切换模块用于根据处理后的数据信息,切换当前车辆的控制方式。
41.基于以上系统,本发明还提出一种基于神经网络的车辆队列控制模式切换方法,如图1所示,包括以下步骤:
42.s1:利用数据采集模块采集当前车辆和前方车辆的数据信息,并利用深度学习法预测前方车辆的加速度;
43.s2:根据当前车辆的数据信息、当前车辆的加速度、前方车辆的数据信息和前方车辆的加速度,利用控制器切换模块判断当前车辆的行驶区域的消息延迟是否超过阈值,若是进入步骤s3,否则进入步骤s4;
44.s3:利用神经网络模型预测当前车辆的数据信息,并将当前车辆的cacc模式切换至acc模式,控制车辆的行驶轨迹,并进入步骤s5;
45.s4:继续接收前方车辆的数据信息,并进入步骤s5;
46.s5:判断前方车辆和当前车辆的车头时距是否恒定,若是则完成车辆队列控制,否则返回步骤s1。
47.在本发明实施例中,步骤s2中,判断当前车辆的行驶区域是否存在消息延迟的具体方法为:若当前车辆的响应信号和前方车辆的响应信号满足||λ
i
(t)||2≤||λ
i
‑1(t)||2,则当前车辆的行驶区域存在消息延迟,其中,λ
i
(t)表示当前第i辆车的响应信号,λ
i
‑1(t)表示前方第i
‑
1辆车的响应信号,||
·
||2表示信号能量,响应信号包括车辆的间距误差、速度和加速度。
48.在本发明实施例中,步骤s3包括以下子步骤:
49.s31:利用数据处理模块对前方车辆的数据信息进行清洗;
50.s32:选取清洗后前方车辆的数据信息的80%对神经网络模型进行训练,选取清洗后前方车辆的数据信息的20%对神经网络模型进行测试,得到神经网络模型的输出数据;
51.s33:将神经网络模型的输出数据作为当前车辆的数据信息,并将当前车辆的cacc模式切换至acc模式。
52.在本发明实施例中,步骤s32中,对神经网络模型进行训练的具体方法为:将当前车辆的速度作为神经网络模型的第一输入参数,将当前车辆的速度和水平位置坐标作为神经网络模型的第二输入参数,将当前车辆的速度、水平位置坐标和垂直位置坐标作为神经网络模型的第三输入参数,分别计算第一输入参数、第二输入参数和第三输入参数的均方根误差,利用最小均方根误差对应的输入参数对神经网络模型进行训练。
53.在本发明实施例中,车辆动力学模型定义为x
i
=(s
i
,v
i
,a
i
)
t
,其中s
i
,v
i
,a
i
分别代表第i辆车的位置、速度和加速度。采用线性纵向车辆动力学模型来制定后续车的动力学模型如下式所示。
[0054][0055]
其中,u
i
=u
i
。u
i
表示根据上层控制器计算的加速度的输入。
[0056]
串稳定性分析过程中,通常使用面向性能的频域方法,因为它具有用于控制器分析和合成的实用性特性,在这种方法中,串稳定性定义为头车或前车产生的动态扰动,如:加速度绕道,速度扰动和间距误差扰动,不能在想车辆队列上游方向传播是放大。它的数学表达式为:
[0057][0058]
该公式表示的含义为车辆信号中的能量必须在车队上游方向衰减。
[0059]
在本发明实施例中,采用matlab绘画出车辆队列中每一辆车的行驶情况。为了清楚展示车辆队列串稳定性的情况,水平坐标为时间,纵坐标为车辆的加速度变化。设定车辆队列中有4辆车,每一辆车的行驶情况如图2和图3所示,图2为串稳定性较差情况的下加速度曲线图,图3为串稳定性较好情况的下加速度曲线图。
[0060]
由图2和图3可以看出,在串稳定性不好的情况下,当前车产生扰动后,后面车辆并
不会立即接收到前车的扰动信息,做出判断减少这种扰动。如图2所示,在15秒的时候,头车开始减速,然而其后车辆的加速度依旧在增加。由此,当车辆所处的区域有较大的信息延迟时,车辆队列的串稳定性受到较大影响,后面车辆并不能及时接收到头车产生的扰动信息,依旧会按照当前的行驶轨迹进行行驶,会造成车祸等情况发生。
[0061]
为了确保车辆队列的串稳定性,需要对车辆的接收信息进行控制。当系统感知到车辆行驶的当前区域存在较大的信息延迟时,将不再采用车辆前端的雷达设备收集的实时数据作为系统的输入,而是将预测数据作为系统的输入,控制车辆队列中车辆的行驶轨迹。
[0062]
因此,需要对前车的加速度进行预测。目前,可选的预测网络有:gru、rnns和lstm。对比这三种网络的优缺点以及结合当前需求,最终选择lstm进行前车加速度的预测。lstm三层预测结构图如图4所示。
[0063]
本实验首先在pycharm中绘制了车辆雷达收集的一段时间内前车的车辆加速度信息图像,图像的横坐标表示时间,纵坐标表示车辆行驶的加速度。并创建lstm预测模型,调整参数,实验结果如下图5所示。
[0064]
将车辆雷达收集到的数据放入到调整好的lstm网络中进行训练,得到如图6所示的车辆动态轨迹图。由图6可以看出,通过预测网络得到车辆加速度信息,较为符合真实车辆的行车轨迹。
[0065]
由于cacc模式能通过通信获得车辆队列中更多的车辆信息,因此对于当前区域的通信网络也有一定的要求。而当车辆行驶的当前区域存在较大的信息延迟时,采用cacc控制器模式接收到的信息多为延迟信息,即使应用lstm网络预测下一秒时刻的车辆轨迹信息,对维持车辆队列的稳定性也有不好的影响。因此,采用acc模式进行控制。在acc模式下利用lstm网络预测的车辆加速度图像如图7所示。
[0066]
通过图6和图7的车辆下一秒加速度预测数据图像可以看出,控制器由cacc模式转变为acc模式,lstm网络预测出的车辆的动态轨迹更加贴近真实的动态轨迹。
[0067]
本发明的工作原理及过程为:通信延时对协同式车辆队列的控制稳定性具有不利的影响,从而降低了车辆队列的安全性。本发明公开了一种基于神经网络预测的协同式车辆队列控制模式切换方法,从而实现车辆队列的间距不发生较大的波动。当车辆队列系统感知到当前交通环境使通信系统存在较大的信息延迟时,系统将在下游车辆处于巡航状态时,自动从cacc模式切换到acc模式,而此时对前车加速度的判断将十分关键。为此,本发明采用lstm对前车预测时域内的加速度进行预测,通过车辆前端装载的雷达设备获取车辆队列中前车的速度和位置等信息。将收集到的信息放进网络中,对收集的数据进行处理并对前车的加速度信息进行预测。本发明在通信延时条件下,基于lstm预测的方式对车辆队列的控制模式进行切换,降低了车辆在行驶过程中的系统开销,提高了在通信延时条件下车辆队列的稳定性。
[0068]
本发明的有益效果为:
[0069]
(1)本发明的车辆队列控制模式切换系统可以使神经网络处理产生的数据信息更接近前方车辆的真实轨迹信息,并在从cacc控制器方式切换到acc控制器方式时,使得每一辆车只接受前方一辆车的数据信息,从而提高了预测数据的准确性。
[0070]
(2)本发明在通信延时条件下,基于神经网络预测的方式对车辆队列的控制模式进行切换,降低了车辆在行驶过程中的系统开销,提高了在通信延时条件下车辆队列的稳
定性。
[0071]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。