技术特征:
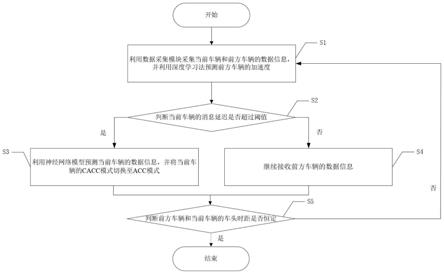
1.一种基于神经网络的车辆队列控制模式切换系统,其特征在于,包括数据采集模块、数据处理模块和控制器切换模块;所述数据采集模块用于接收当前车辆和前方车辆的数据信息;所述数据信息包括车辆的速度、水平位置坐标和垂直位置坐标;所述数据处理模块用于对当前车辆和前方车辆的数据信息进行处理;所述控制器切换模块用于根据处理后的数据信息,切换当前车辆的控制方式。2.一种基于神经网络的车辆队列控制模式切换方法,其特征在于,包括以下步骤:s1:利用数据采集模块采集当前车辆和前方车辆的数据信息,并利用深度学习法预测前方车辆的加速度;s2:根据当前车辆的数据信息、当前车辆的加速度、前方车辆的数据信息和前方车辆的加速度,利用控制器切换模块判断当前车辆的行驶区域的消息延迟是否超过阈值,若是进入步骤s3,否则进入步骤s4;s3:利用神经网络模型预测当前车辆的数据信息,并将当前车辆的cacc模式切换至acc模式,控制车辆的行驶轨迹,并进入步骤s5;s4:继续接收前方车辆的数据信息,并进入步骤s5;s5:判断前方车辆和当前车辆的车头时距是否恒定,若是则完成车辆队列控制,否则返回步骤s1。3.根据权利要求2所述的基于神经网络的车辆队列控制模式切换方法,其特征在于,所述步骤s2中,判断当前车辆的行驶区域存在消息延迟的具体方法为:若当前车辆的响应信号和前方车辆的响应信号满足则当前车辆的行驶区域存在消息延迟,其中,λ
i
(t)表示当前第i辆车的响应信号,λ
i
‑1(t)表示前方第i
‑
1辆车的响应信号,||
·
||2表示信号能量,响应信号包括车辆的间距误差、速度和加速度。4.根据权利要求2所述的基于神经网络的车辆队列控制模式切换方法,其特征在于,所述步骤s3包括以下子步骤:s31:利用数据处理模块对前方车辆的数据信息进行清洗;s32:选取清洗后前方车辆的数据信息的80%对神经网络模型进行训练,选取清洗后前方车辆的数据信息的20%对神经网络模型进行测试,得到神经网络模型的输出数据;s33:将神经网络模型的输出数据作为当前车辆的数据信息,并将当前车辆的cacc模式切换至acc模式。5.根据权利要求4所述的基于神经网络的车辆队列控制模式切换方法,其特征在于,所述步骤s32中,对神经网络模型进行训练的具体方法为:将当前车辆的速度作为神经网络模型的第一输入参数,将当前车辆的速度和水平位置坐标作为神经网络模型的第二输入参数,将当前车辆的速度、水平位置坐标和垂直位置坐标作为神经网络模型的第三输入参数,分别计算第一输入参数、第二输入参数和第三输入参数的均方根误差,利用最小均方根误差对应的输入参数对神经网络模型进行训练。
技术总结
本发明公开了一种基于神经网络的车辆队列控制模式切换系统及切换方法,其系统包括数据采集模块、数据处理模块和控制器切换模块;数据采集模块用于接收当前车辆和前方车辆的数据信息;数据处理模块用于对当前车辆和前方车辆的数据信息进行处理;控制器切换模块用于根据处理后的数据信息,切换当前车辆的控制方式。本发明的车辆队列控制模式切换系统可以使神经网络处理产生的数据信息更接近前方车辆的真实轨迹信息,并在从CACC控制器方式切换到ACC控制器方式时,使得每一辆车只接受前方一辆车的数据信息,从而提高了预测数据的准确性。性。性。
技术研发人员:童星 赵祥模 田彬 徐志刚 张鑫
受保护的技术使用者:长安大学
技术研发日:2021.09.18
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。