1.本发明涉及一种联动机构及包含其的护理床。
背景技术:
2.长期卧床不能自理的老年人、瘫痪者或者因医疗需要身体无法挪位的患者,生活不能自理,完全靠他人服侍生活,他们的背部长期与被褥接触容易产生褥疮,在炎热的夏季这种现象尤其突出。褥疮的形成是由于人体重心没有位移,重力集中在一点,人体局部组织长期受重压,血液循环发生障碍,主要是人体的骶骨和髋骨部位,一旦护理不好,很快就形成溃烂和褥疮。减少褥疮的最好办法是要经常左右翻身,或者从卧姿变为座姿,但是将一个不能自理的病人翻身,一般需要两个成年人合力帮助才能完成,这给医院的护理人员或家庭成员造成不小的负担。
3.现在市场上出现了一种护理床,可以将背部和腿部的床板顶起,实现将卧床的患者的背部或腿部的躯体顶起,从而避免褥疮的产生以及方便患者吃饭或排便等。但是,现有的护理床的背部和腿部床板的升降都是由单独的驱动机构来驱动升降,成本较高。
技术实现要素:
4.本发明要解决的技术问题是为了克服现有技术中的上述缺陷,提供一种联动机构及包含其的护理床。
5.本发明是通过下述技术方案来解决上述技术问题:
6.一种联动机构,包括第一翻转单元、第二翻转单元,所述第一翻转单元和所述第二翻转单元相对翻转设置,所述联动机构还包括联动组件,所述联动组件具有第一连杆和第二连杆,所述第一连杆和所述第二连杆分别与所述第一翻转单元和所述第二翻转单元连接;
7.所述第一连杆与所述第二连杆可切换连接状态,从而使得所述第二连杆随同所述第一连杆移动,或者所述第二连杆不随同所述第一连杆移动。
8.在本方案中,采用上述结构形式,通过改变第一连杆和第二连杆的连接状态,就可实现第一翻转单元与第二翻转单元共同翻转或第一翻转单元单独翻转两种控制模式,不仅结构简单,而且降低了生产成本。
9.较佳地,所述联动机构还包括锁止件,所述锁止件用于使所述第一连杆和所述第二连杆在连接状态和非连接状态之间切换;
10.当所述第一连杆和所述第二连杆处于连接状态且所述第一翻转单元翻转时,所述第一连杆带动所述第二连杆朝所述第一连杆移动的方向移动,所述第二连杆驱使所述第二翻转单元朝与所述第一翻转单元相反的翻转方向翻转;
11.当所述第一连杆和所述第二连杆处于非连接状态且所述第一翻转单元翻转时,所述第二连杆不移动。
12.在本方案中,采用上述结构形式,通过锁止件改变联动组件的第一连杆和第二连
杆的连接状态,结构简单,控制方便。
13.较佳地,所述联动机构还包括第一转轴和第一连接件,所述第一转轴设置于所述第一翻转单元的下方,所述第一连接件的一端固定在所述第一转轴上,所述第一连接件的另一端滑设于所述第一翻转单元;
14.所述第一连杆连接于所述第一转轴,所述第一转轴用于驱使所述第一翻转单元翻转。
15.在本方案中,采用上述结构形式,通过第一转轴的转动带动第一翻转单元进行翻转,结构简单。
16.较佳地,所述联动机构还包括第二转轴和第二连接件,所述第二转轴设置于所述第二翻转单元的下方,所述第二连接件的一端固定在所述第二转轴上,所述第二连接件的另一端滑设于所述第二翻转单元;
17.所述第二连杆连接于所述第二转轴,所述第二转轴用于驱使所述第二翻转单元翻转。
18.在本方案中,采用上述结构形式,通过第二转轴的转带动第二翻转单元进行翻转,第二转轴通过联动组件与第一转轴连接并通过第一转轴的转动带动第二转轴的转动,结构简单。
19.较佳地,所述联动机构还包括第三连接件,所述第三连接件的一端固定在所述第一转轴上,所述第三连接件的另一端与所述第一连杆铰接;
20.其中,在所述第一转轴沿第一方向转动时,所述第一连杆朝远离所述第二转轴的方向移动;
21.在所述第一转轴沿第二方向转动时,所述第一连杆朝靠近所述第二转轴的方向移动。
22.较佳地,所述联动机构还包括第四连接件,所述第四连接件的一端固定在所述第二转轴上,所述第四连接件的另一端与所述第二连杆铰接;
23.其中,在所述第一转轴沿第一方向转动时,所述第一连杆朝远离所述第二转轴的方向移动,且可使所述第二转轴沿所述第一方向转动;
24.在所述第一转轴沿第二方向转动时,所述第一连杆朝靠近所述第二转轴的方向移动,且可使所述第二转轴沿所述第二方向转动。
25.较佳地,所述联动机构还包括驱动单元,所述驱动单元用于驱动所述第一转轴转动。
26.在本方案中,采用上述结构形式,通过驱动单元驱动第一转轴的转动可使第一翻转单元发生翻转。
27.较佳地,所述锁止件包括锁轴,所述第一连杆滑动套设于所述第二连杆内,所述第二连杆上设有所述锁止件,所述第一连杆上设有与所述锁止件对应的锁槽;
28.所述锁轴位于所述锁槽内时,所述第一连杆和所述第二连杆处于连接状态;
29.所述锁轴位于所述锁槽外时,所述第一连杆和所述第二连杆处于非连接状态,所述第一连杆和所述第二连杆相对滑动。
30.在本方案中,采用上述结构形式,锁轴与锁槽的卡合时,第一连杆和第二连杆连接,第一翻转单元与第二翻转单元同时翻转,锁轴与锁槽的分离时,第一连杆和第二连杆不
连接,只有第一翻转单元翻转,第二翻转单元没有第二连杆的带动,不发生翻转。
31.较佳地,所述锁槽具有多个,多个锁槽沿所述第一连杆的长度方向间隔设置。
32.在本方案中,采用上述结构形式,通过将锁轴卡合在不同的锁槽内,改变第二连杆的移动行程,进而改变第二转轴的转动角度,从而使第二翻转单元翻转不同的角度。
33.较佳地,所述锁止件还包括操作手柄,所述操作手柄用于驱动所述锁轴进入或脱离所述锁槽。
34.在本方案中,采用上述结构形式,通过操作手柄,方便患者在床上可以自己调节翻转的部位或者翻转的角度。
35.较佳地,所述联动机构还包括安装架,所述第一翻转单元和所述第二翻转单元分别铰接在所述安装架上。
36.较佳地,所述联动机构还包括第三翻转单元,所述第三翻转单元位于所述第二翻转单元远离所述第一翻转单元的一侧,所述第三翻转单元靠近所述第二翻转单元的一侧与所述第二翻转单元铰接,所述第三翻转单元远离所述第二翻转单元的一侧铰接于所述安装架上的滑动件上,所述滑动件可在所述安装架上滑动。
37.在本方案中,采用上述结构形式,通过第二翻转单元的翻转带动第三翻转单元的翻转,可使第二翻转单元和第三翻转单元的两块翻转板形成符合人体腿部弯折的角度。
38.一种护理床,所述护理床包含如上所述的联动机构。
39.在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实施例。
40.本发明的积极进步效果在于:本发明的联动机构通过改变第一连杆和第二连杆的连接状态,就可实现第一翻转单元与第二翻转单元共同翻转或第一翻转单元单独翻转两种控制模式,不仅结构简单,而且降低了生产成本,更增加了护理床的使用功能和使用者的体验感受的选择性。
附图说明
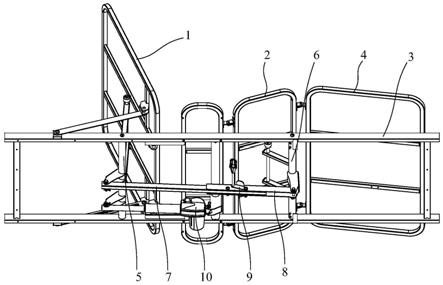
41.图1为本发明较佳实施例中联动机构的结构示意图。
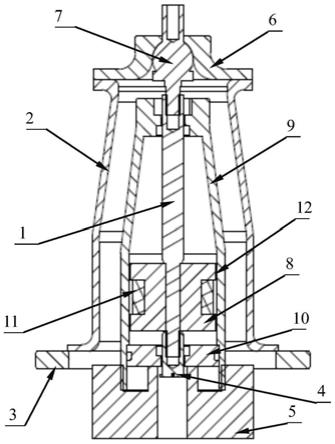
42.图2为本发明较佳实施例中联动机构的局部结构放大图。
43.图3为本发明较佳实施例中联动组件的结构示意图。
44.图4为本发明较佳实施例中联动机构的联动状态示意图。
45.图5为图4中a处结构放大图。
46.图6为本发明较佳实施例中联动组件的锁止状态结构示意图。
47.图7为本发明较佳实施例中联动机构的非联动状态示意图。
48.图8为图7中b处结构放大图。
49.附图标记说明:
50.第一翻转单元1
51.第二翻转单元2
52.安装架3
53.第三翻转单元4
54.第一转轴5
55.第二转轴6
56.第一连杆7
57.锁槽701
58.滑槽702
59.第二连杆8
60.开口801
61.导轴802
62.锁止件9
63.锁轴901
64.转动部902
65.驱动单元10
66.操作手柄11
67.第一连接件12
68.第二连接件13
69.第三连接件14
70.第四连接件15
71.第五连接件16
具体实施方式
72.下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在以下实施例范围之中。
73.如图1-8所示,为本实施例的一种联动机构,该联动机构包括第一翻转单元1、第二翻转单元2、安装架3,第一翻转单元1和第二翻转单元2分别铰接在安装架3上,第一翻转单元1和第二翻转单元2相对翻转设置,该联动机构还包括联动组件和锁止件9,联动组件具有第一连杆7和第二连杆8,第一连杆7和第二连杆8分别与第一翻转单元1和第二翻转单元2连接,锁止件9用于使第一连杆7和第二连杆8在连接状态和非连接状态之间切换。
74.如图4-6所示,当第一连杆7和第二连杆8处于连接状态且第一翻转单元1翻转时,第一连杆7带动第二连杆8朝第一连杆7移动的方向移动,第二连杆8驱使第二翻转单元2朝与第一翻转单元1相反的翻转方向翻转。
75.如图7-8所示,当第一连杆7和第二连杆8处于非连接状态且第一翻转单元1翻转时,第二连杆8不移动,第二翻转单元2在无第二连杆8的带动下也不会发生翻转。
76.该联动机构通过锁止件9改变联动组件的第一连杆7和第二连杆8的连接状态,只需一个驱动机构就可实现第一翻转单元1与第二翻转单元2共同翻转或第一翻转单元1单独翻转两种控制模式,不仅结构简单,而且降低了生产成本。
77.在本实施例中,如图1和图2所示,该联动机构还包括第一转轴5、第二转轴6、第一连接件12和第二连接件13,第一转轴5和第二转轴6分别对应设置于第一翻转单元1和第二翻转单元2的下方,第一连接件12的一端固定在第一转轴5上,第一连接件12的另一端滑设于第一翻转单元1,第二连接件13的一端固定在第二转轴6上,第二连接件13的另一端滑设于第二翻转单元2;第一连杆7和第二连杆8分别连接于第一转轴5和第二转轴6,第一转轴5
和第二转轴6分别用于驱使第一翻转单元1和第二翻转单元2翻转。
78.采用上述结构形式,通过第一转轴5和第二转轴6的转动分别带动第一翻转单元1和第二翻转单元2进行翻转,第二转轴6通过联动组件与第一转轴5连接并通过第一转轴5的转动带动第二转轴6的转动,结构简单。
79.具体地,由于第一连接件12的一端固定在第一转轴5上,另一端滑设于第一翻转单元1,当第一转轴5转动时,第一连接件12滑设于第一翻转单元1的一端在第一翻转单元1上由远离铰接端一侧向靠近铰接端的一侧滑动,使得第一翻转单元1绕铰接端一侧翻转;同理,第二翻转单元2也是如此,在此不再赘述。
80.在其它实施方式中,第一连接件12与第一翻转单元1的接触的一端也可以是滚动形式,当第一转轴5转动时,第一连接件12与第一翻转单元1接触的一端的滚轮在第一翻转单元1上由远离铰接端一侧向靠近铰接端的一侧滚动,使得第一翻转单元1绕铰接端一侧翻转;同理,第二翻转单元2也是如此,在此不再赘述。
81.如图1和图2所示,该联动机构还包括第三连接件14和第四连接件15,第三连接件14的一端固定在第一转轴5上,第三连接件14的另一端与第一连杆7铰接;第四连接件15的一端固定在第二转轴6上,第四连接件15的另一端与第二连杆8铰接;其中,在第一转轴5沿第一方向转动时,第一连杆7朝远离第二转轴6的方向移动,且可使第二转轴6沿第一方向转动;在第一转轴5沿第二方向转动时,第一连杆7朝靠近第二转轴6的方向移动,且可使第二转轴6沿第二方向转动。
82.具体参见图1和图2,由于第三连接件14一端固定在第一转轴5上,另一端朝向第一转轴5的下方延伸,第四连接件15一端固定在第二转轴6上,另一端也朝向第二转轴6的下方延伸,当第一转轴5绕顺时针旋转时,第一翻转单元1顺时针翻转,第一连杆7朝左侧移动,从而带动第二连杆8也朝左侧移动,使得第二转轴6也沿顺时针转动,由于第二翻转单元2的铰接部与第一翻转单元1的铰接部相对设置,此时第二翻转单元2在第二转轴6的驱使下沿逆时针翻转。当第一转轴5绕逆时针转动时,第一翻转单元1逆时针翻转进行复位,此时,第一连杆7朝右侧移动,从而带动第二连杆8也朝右侧移动,使得第二转轴6也沿逆时针转动,此时第二翻转单元2在第二转轴6的驱使下沿顺时针翻转。
83.上述描述的是第一连杆7和第二连杆8处于连接状态的动作原理,当第一连杆7与第二连杆8不连接时,上述动作中只有第一翻转单元1翻转,第二翻转单元2不翻转。
84.当然,也可以进行如下操作,起初使第一连杆7和第二连杆8连接,驱使第一翻转单元1和第二翻转单元2同时翻转,在第一翻转单元1和第二翻转单元2翻转完毕后,使用限位机构限制第二转轴6的转动或者限制第二翻转单元2的翻转,通过操作手柄11控制锁止件9将第一连杆7和第二连杆8分开,此时再驱动第一翻转单元1翻转复位,就可以保持第二翻转单元2的翻转状态。
85.联动机构还包括驱动单元10,驱动单元10用于驱动第一转轴5转动。通过驱动单元10驱动第一转轴5的转动可使第一翻转单元1发生翻转。
86.在本实施例中,如图1和图2所示,驱动单元10是一个线性马达,线性马达的伸缩端通过第五连接件16与第一转轴5连接,其中第五连接件16与第三连接件14平行设置,第五连接件16一端固定在第一转轴5上,另一端铰接于线性马达的伸缩端。
87.在其它实施方式中,驱动单元10也可以为气动或液压伸缩机构或者是其它类型的
伸缩机构;驱动单元10也可以是步进电机,电机输出端通过联轴器直接驱动第一转轴5。
88.在本实施例中,锁止件9包括锁轴901,第一连杆7滑动套设于第二连杆8内,第二连杆8上设有锁止件9,第一连杆7上设有与锁止件9对应的锁槽701;锁轴901位于锁槽701内时,第一连杆7和第二连杆8处于连接状态;锁轴901位于锁槽701外时,第一连杆7和第二连杆8处于非连接状态,第一连杆7和第二连杆8相对滑动。即,锁轴901与锁槽701的卡合时,第一连杆7和第二连杆8连接,第一翻转单元1与第二翻转单元2同时翻转,锁轴901与锁槽701的分离时,第一连杆7和第二连杆8不连接,只有第一翻转单元1翻转,第二翻转单元2没有第二连杆8的带动,不发生翻转。
89.锁槽701具有多个,多个锁槽701沿第一连杆7的长度方向间隔设置。通过将锁轴901卡合在不同的锁槽701内,改变第二连杆8的移动行程,进而改变第二转轴6的转动角度,从而使第二翻转单元2翻转不同的角度。
90.具体地,参见图3、图5、图6和图8所示,第一连杆7可在第二连杆8内滑动,第一连杆7的侧面在长度方向上具有滑槽702,第二连杆8上设有导轴802,滑槽702与导轴802相配合使第一连杆7在第二连杆8内滑动。
91.第一连杆7的上端面设有锁槽701,第二连杆8的上端面开有开口801,锁止件9包括转动部902和锁轴901,转动部902铰接在第二连杆8上,转动部902的转动带动锁轴901移动,锁轴901可穿过第二连杆8的开口801进入锁槽701内,实现第一连杆7与第二连杆8的联动。
92.锁槽701具有一定的长度,以使第一连杆7先移动一端距离后第二连杆8再移动,保证第一翻转单元1比第二翻转单元2具有更大的翻转角度。
93.锁止件9还包括操作手柄11,操作手柄11用于驱动锁轴901进入或脱离锁槽701。通过操作手柄11,方便患者在床上可以自己调节翻转的部位或者翻转的角度。在本实施例中,操作手柄11的连杆与锁轴901为一体结构。
94.如图1、图4和图7所示,在本实施例中,联动机构还包括第三翻转单元4,第三翻转单元4位于第二翻转单元2远离第一翻转单元1的一侧,第三翻转单元4靠近第二翻转单元2的一侧与第二翻转单元2铰接,第三翻转单元4远离第二翻转单元2的一侧铰接于安装架3上的滑动件上,滑动件可在安装架3上滑动。通过第二翻转单元2的翻转带动第三翻转单元4的翻转,可使第二翻转单元2和第三翻转单元4的两块翻转板形成符合人体腿部弯折的角度。
95.本发明还公开了一种护理床,该护理床包含如上的联动机构。增加了护理床的使用功能和使用者的体验感受的选择性。
96.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。