技术特征:
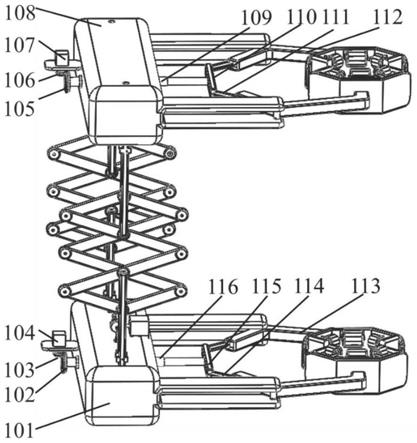
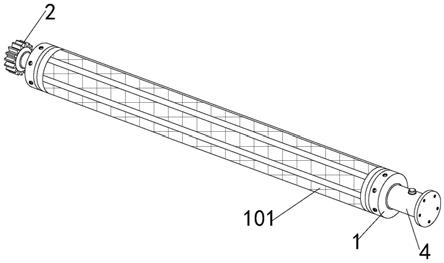
1.一种矿井钢丝绳尘垢清除机器人,其特征在于:它包括抱紧装置(1)、升降装置(2)、驱动装置(3)及尘垢清除装置(4);其中抱紧装置(1)包括上抱紧装置和下抱紧装置,其中上抱紧装置设有用以夹住矿井钢丝绳的上夹持(112),下抱紧装置设有用以夹住矿井钢丝绳的下夹持(113),升降装置(2)设置在上抱紧装置和下抱紧装置之间,通过调节升降装置(2)从而改变上抱紧装置和下抱紧装置之间的距离以避免机器人在驱动装置(3)驱动攀爬时产生晃动,尘垢清除装置(4)设置在上夹持(112)与下夹持(113)的拱字形壁内表面上与钢丝绳表面接触,尘垢清除装置(4)配合驱动装置(3)在钢丝绳上行走实现尘垢清除。2.根据权利要求1所述的矿井钢丝绳尘垢清除机器人,其特征在于:所述下抱紧装置包括下抱紧平台(101)、下锥齿轮a(102)、下锥齿轮b(103)、下抱紧电机(104)、下连杆a(115)、下夹持(113)和下连杆b(114)、下套筒(116);下连杆b(114)为t字型结构,其中下抱紧电机(104)通过支架设置在下抱紧平台(101)上,下抱紧平台(101)一侧设有指向钢丝绳的轨道,下套筒(116)和下连杆a(115)之间螺纹伸缩连接,锥齿轮b(103)设置在下套筒(116)尾端,下抱紧电机(104)的输出轴与下锥齿轮a(102)啮合,通过下锥齿轮a(102)驱动锥齿轮b(103)旋转从而使下连杆a(115)在下套筒(116)内伸缩,下连杆a(115)端部和有双叉结构,双叉结构分别设有两根下连杆b(114),两根下连杆b(114)分的端部别限制在轨道中,两根下连杆b(114)的端部设有下夹持(113),所述下夹持(113)包括相互连接的耳廓型连杆臂和拱字形壁,驱动装置(3)及尘垢清除装置(4)均设置在拱字形壁内表面上,耳廓型连杆臂与连根下连杆b(114)铰接,下连杆b(114)与下抱紧平台(101)铰接,下连杆a(115)在下套筒(116)内进行伸缩从而带动下连杆b(114)的转动;下连杆b(114)带动耳廓型连杆臂进行转动,耳廓型连杆臂和拱字形壁相互连接,通过拱字形壁使驱动装置(3)与矿井钢丝绳接触并抱紧。3.根据权利要求2所述的矿井钢丝绳尘垢清除机器人,其特征在于:上抱紧装置与下抱紧装置结构相同并对称式设置,为机器人提供足够的夹紧力,便于适应不同直径的钢丝绳,提高机器人在攀爬过程中的平稳性;上连杆b(111)为t字型结构,其中上抱紧电机(107)通过支架设置在上抱紧平台(108)上,上抱紧平台(108)一侧设有指向钢丝绳的轨道,上套筒(109)和上连杆a(110)之间螺纹伸缩连接,锥齿轮b(103)设置在上套筒(109)尾端,上抱紧电机(107)的输出轴与上锥齿轮a(110)啮合,通过上锥齿轮a(110)驱动锥齿轮b(103)旋转从而使上连杆a(110)在上套筒(109)内伸缩,上连杆a(110)端部和有双叉结构,双叉结构分别设有两根上连杆b(111),两根上连杆b(111)分的端部别限制在轨道中,两根上连杆b(111)的端部分别设有上夹持(112),所述上夹持(112)包括相互连接的耳廓型连杆臂和拱字形壁,驱动装置(3)及尘垢清除装置(4)均设置在拱字形壁内表面上,耳廓型连杆臂与连根上连杆b(111)铰接,上连杆b(111)与上抱紧平台(108)铰接,上连杆b(111)在上套筒(109)内进行伸缩从而带动上连杆b(111)的转动;上连杆b(111)带动耳廓型连杆臂进行转动,从而使拱字形壁跟随转动产生角度变化,通过拱字形壁转动从而使驱动装置(3)与矿井钢丝绳接触并抱紧。4.根据权利要求1所述的矿井钢丝绳尘垢清除机器人,其特征在于:所述升降装置包括左右对称设置的伸缩机构,伸缩机构顶底端分别与上抱紧平台(108)和下抱紧平台(101)连接,在下抱紧平台(101)上还设有驱动伸缩机构的同步驱动装置,所述伸缩机构包括剪刀结构的伸缩架(206),伸缩架(206)与上抱紧平台(108)之间设有上支撑架(205),与下抱紧平
台(101)支架内设有下支撑架(204),其中下支撑架(204)上还设有伸缩杆(203),两根对称设置的伸缩杆(203)外表面设有螺纹,两个伸缩杆(203)外表面螺纹旋向相反,保证两伸缩杆(203)的同方向性,两个伸缩杆(203)下端部分别设有左锥齿轮a(201)和右锥齿轮a(207);所述同步驱动装置包括升降电机(210),升降电机(210)的输出轴两侧分别设有右传动轴(209)和左传动轴(214),右传动轴(209)两端分别设有右锥齿轮c(211)和右锥齿轮b(208),左传动轴(214)两端分别设有左锥齿轮c(213)和左锥齿轮b(202),其中升降电机(210)的输出轴通过锥齿轮(212)同时啮合右传动轴(209)的右锥齿轮c(211)以及左传动轴(214)的左锥齿轮c(213),左锥齿轮a(201)和右锥齿轮a(207)分别与左锥齿轮b(202)和右锥齿轮b(208)啮合;机器人抱紧钢丝绳时;上抱紧装置中上夹持(112)处于非夹紧钢丝绳状态,下夹持(113)处于夹紧钢丝绳状态;通过升降电机(210)的转动带动锥齿轮(212)转动,右锥齿轮c(211)和左锥齿轮c(213)与锥齿轮(212)相互啮合,锥齿轮(212)转动,带动右锥齿轮c(211)和左锥齿轮c(213)的转动,从而左传动轴(214)和右传动轴(209)转动,左传动轴(201)和右传动轴(209)的转动,通过带动左锥齿轮a(201)和右锥齿轮a(207)转动使两个伸缩杆(203)螺纹转动,伸缩架(206)与伸缩杆(203)铰接,其铰接处可沿下支撑架(204)内表面滑动,从而使伸缩架(206)上下升降,伸缩杆(203)与伸缩架(206)的相互配合,根据机器人运行速度和不同种类的钢丝绳以及应用工况的不同,适当调节上夹持(112)和下夹持(113)之间的距离,减小机器人攀爬时产生的径向晃动幅度,增加攀爬的稳定性,然后上抱紧装置中上夹持(112)夹紧矿用钢丝绳;上夹持(112)和下夹持(113)中的拱字形壁采用强度和刚度较好的材质,防止机器人抱紧时在力的作用下发生变形,使机器人重心与矿用钢丝绳轴线基本重合;控制上夹持和下夹持从打开状态变为闭合状态,使得机器人被安置在钢丝绳上。5.根据权利要求3所述的矿井钢丝绳尘垢清除机器人,其特征在于:所述驱动装置(3)包括设置在上夹持(112)端部拱字形壁的上驱动装置,以及设置在下夹持(113)端部拱字形壁的下驱动装置,上驱动装置和下驱动装置均包括驱动轮(301)、直流减速电机(302)、弹簧(303)、驱动轮支撑架(304);驱动轮支撑架(304)分别设置在上夹持(112)和下夹持(113)的拱字形壁内侧,支撑架(304)通过转轴连接有用以在钢丝绳上行走的驱动轮(301),驱动轮支撑架(304)与拱字形壁之间通过两个弹簧(303)连接,使驱动轮支撑架(304)可前后伸缩,以实现不同直径钢丝绳的匹配,弹簧(303)用于产生夹紧力,使机器人抱紧在钢丝绳上,矿井钢丝绳尘垢清除机器人在钢丝绳攀爬遇到障碍时,通过弹簧(303)实现越障功能;驱动轮(301)外表面采用橡胶材质,并纹理处理,直流减速电机(302)设置在驱动轮支撑架(304)侧,并通过输出轴直连驱动轮(301),所有直流减速电机(302)同时运转,实现机器人攀爬钢丝绳。通过上下抱紧装置产生足够的夹紧力,机器人抱紧在钢丝绳上;然后控制直流减速电机(302),驱动滚轮转动,使上下驱动装置的驱动轮同步转动,实现机器人高效攀爬钢丝绳。6.根据权利要求5所述的矿井钢丝绳尘垢清除机器人,其特征在于:所述尘垢清除装置(4)包括通过拱字形壁设置在上驱动装置两侧的上尘垢清除装置,以及通过拱字形壁设置在下驱动装置两侧的下尘垢清除装置,两个拱字形壁相互配合,从而使上驱动装置和上尘垢清除装置、下驱动装置和下尘垢清除装置将钢丝绳包裹夹持。7.根据权利要求6所述的矿井钢丝绳尘垢清除机器人,其特征在于:所述上尘垢清除装置和下尘垢清除装置结构相同,尘垢清除装置包括尘垢清除辅助轮(402)、尘垢清除铜刷
(403)和齿轮箱体(401);尘垢清除辅助轮(402)安装在齿轮箱体(401)外侧,分布在驱动轮(301)两侧,防止驱动轮(301)在钢丝绳上打滑发生错位,有助于驱动轮(301)外表面中心处与钢丝绳表面接触,矿井钢丝绳尘垢清除机器人在直流减速电机(302)的驱动下进行攀爬,尘垢清除辅助轮(402)因为与钢丝绳间的摩擦力从而跟随机器人的上升而转动,齿轮箱体(401)设置在上夹持(112)与下夹持(113)内侧表面,将尘垢清除辅助轮(402)的转动转化为尘垢清除铜刷(403)的转动,齿轮箱体(401)包括相互啮合的箱体直齿圆柱齿轮a(409)和箱体直齿圆柱齿轮b(410),箱体直齿圆柱齿轮a(409)上设有与尘垢清除辅助轮(402)连接的箱体转动轴c(408),箱体直齿圆柱齿轮a(409)通过箱体转动轴a(404)将动力传递给端部设置的箱体锥齿轮a(405),箱体锥齿轮a(405)带动垂直其啮合的箱体锥齿轮b(407)从而带动箱体转动轴b(406)转动,箱体转动轴b(406)带动连接的尘垢清除铜刷(403)的转动,实现尘垢清除功能。8.一种使用上述任一权利要求所述矿井钢丝绳尘垢清除机器人的工作方法,其特征在于:步骤包括准备阶段、工作阶段、回收阶段;准备阶段:通过升降装置(2)调节上夹持(112)和下夹持(113)的状态,首先使上抱紧装置中上夹持(112)松开矿用钢丝绳,下夹持(113)夹紧矿用钢丝绳,调节上夹持(112)和下夹持(113)之间的距离使机器人重心与矿用钢丝绳轴线基本重合,机器人在矿用钢丝绳上运行不会产生径向晃动幅度,然后上抱紧装置中上夹持(112)夹紧矿用钢丝绳,开始准备攀爬钢丝绳;具体的,右锥齿轮c(211)和左锥齿轮c(213)与锥齿轮(212)相互啮合,升降电机(210)轴与锥齿轮(212)连接,锥齿轮(212)的转动,带动右锥齿轮c(211)和左锥齿轮c(213)转动;右锥齿轮b(208)和左锥齿轮b(202)分别与右传动轴(209)和左传动轴(214)连接,右锥齿轮c(211)和左锥齿轮c(213)的带动右传动轴(209)和左传动轴(214)转动;右锥齿轮c(211)和左锥齿轮c(213)分别与右锥齿轮a(207)和左锥齿轮a(201)啮合,从而右锥齿轮a(207)和左锥齿轮a(201)转动,通过右锥齿轮a(207)和左锥齿轮a(201)的转动使两个伸缩杆(203)伸缩,伸缩杆(203)与伸缩架(206)铰接,其铰接处可沿下支撑架(204)内表面滑动,从而使伸缩架(206)上下升降,伸缩杆(203)与伸缩架(206)的配合;工作阶段:在准备阶段的抱紧与升降工作完成后,驱动装置中的直流减速电机(302)开始运行并带动驱动轮(306)转动,从而机器人在矿用钢丝绳上开始攀爬,攀爬过程中带动尘垢清除辅助轮(402)的转动,接着通过齿轮箱体(401)的一系列传动带动尘垢清除铜刷(403)快速转动,在攀爬过程中对矿用钢丝绳进行尘垢清除;回收阶段:完成矿用钢丝绳的尘垢清除后,上抱紧电机(107)和下抱紧电机(104)输出轴反向转动,从而使上夹持(112)和下夹持(113)松开矿用钢丝绳从而取下机器人,此时通过升降装置缩短机器人长度从而便于机器人的搬动与存放以待下次作业使用。
技术总结
本发明公开了一种矿井钢丝绳尘垢清除机器人及工作方法,适用于矿井下使用。其包括抱紧装置、升降装置、驱动装置及尘垢清除装置;所述抱紧装置上下对称式设置,通过上下抱紧装置张开闭合,实现机器人松开抱紧钢丝绳;所述升降装置左右对称式设置,通过与抱紧装置配合,可实现灵活升降,保证机器人攀爬的稳定性;所述尘垢清除装置在拱字形壁表面对称式设置,与驱动装置相互配合,实现尘垢清除工作;所述驱动装置在拱字形壁内表面对称式设置,与抱紧装置配合,实现机器人在钢丝绳上攀爬。其结构简单,体积小重量轻,使用方便,满足在矿井钢丝绳上灵活攀爬的要求,实现高效安全的钢丝绳尘垢清除清洁作业。清除清洁作业。清除清洁作业。
技术研发人员:孙博文 杨建华 王亮 许钟奇 田丰 王重秋 单振 张晓光 陈世其
受保护的技术使用者:中国矿业大学
技术研发日:2021.09.27
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。