1.本发明涉及康复训练生产技术领域,具体为一种神经内科患者康复用行走训练设备及其使用方法。
背景技术:
2.在神经内科患者(例如脑血管疾病患者)康复后期需要用到行走训练设备进行患者的复健,以防止患者在长期卧床以后导致的身体机能丧失,一般情况下患者会使用行走训练车进行行走训练,在患者进行康复行走训练时,通常会有一个监护人在患者身边进行看护。
3.现有的行走训练车结构简单,主要是依靠患者上肢力量进行支撑,由于患者长期卧床,腿部肌肉组织萎缩,使得身体机能减弱,下肢力量会减弱,在使用行走训练车时,会由于下肢力量不足,发生向一侧跌落的情况,会对患者造成二次伤害,增重病情,由于在患者前方有训练车为患者提供支撑,又因为患者向后倾倒的时候,患者手会抓住训练车,因此向后倾倒较慢,容易被监护人发现,并进行保护,以防止患者向后倾倒,但是在两侧的倾倒没有办法通过人为判断并预防的,当患者向其中一侧跌落时,训练车难以给到患者一定扶持作用,因此会快速向一侧倾倒,而监护人来不及反应,从而导致患者受到二次伤害。
技术实现要素:
4.(一)解决的技术问题
5.患者在使用行走训练车时会因为上肢力量不足,发生向一侧跌落,监护人反应不及时,造成在患者跌落以后会对患者造成二次伤害,加重患者的病情。
6.(二)发明内容
7.针对现有技术中存在的上述技术问题,本发明的实施例提供了一种神经内科患者康复用行走训练设备及其使用方法。
8.为解决上述技术问题,本发明的实施例采用的技术方案是:
9.一种神经内科患者康复用行走训练设备及其使用方法,包括基板,其特征在于:所述基板一侧的外壁设置有固定患者肩部用的夹紧机构,所述夹紧机构贯穿并延伸至基板的另一侧外壁,所述基板一侧的外壁设置有控制机构,且患者肩部施加作用力于所述夹紧机构保持轴向摆动,并使所述控制机构保持同步运动;
10.所述基板相对两侧的外壁均设置有支撑脚,所述支撑脚内设置沿支撑脚槽口方向运动的滑动壳,所述滑动壳内设有辅助脚,所述辅助脚被装配于当所述控制机构向任一一侧保持偏转,并使同侧支撑脚沿竖直方向向下,且辅助脚向同侧旋转。
11.作为优选,所述夹紧机构包括第一弧形瓣、第二弧形瓣和靠背,所述第一弧形瓣和第二弧形瓣的数量均为两个,所述第一弧形瓣铰接于所述第二弧形瓣内,两个所述第二弧形瓣分别固定安装于所述靠背的两端,所述靠背铰接于所述基板一侧的外壁,所述靠背一侧的外壁固定安装有插接杆,且插接杆与所述控制机构传动连接。
12.作为优选,所述控制机构包括控制杆、第一推动杆、第二推动杆和控制单元,所述第一推动杆与第二推动杆均铰接于所述基板一侧的外壁,且所述第一推动杆与第二推动杆同轴心,所述控制单元的数量为两个,两个所述控制单元分别固定安装于所述基板两侧的内壁。
13.作为优选,所述控制单元包括套管、第一压缩弹簧、按钮件、第四压缩弹簧和限位块,所述第一压缩弹簧的一端固定安装于所述套管内,所述第一压缩弹簧的另一端固定安装于所述按钮件的一端,所述第四压缩弹簧的一端固定安装于所述支撑脚的外壁,所述第四压缩弹簧的另一端与所述限位块相焊接,所述限位块的一端位于所述套管内。
14.作为优选,所述支撑脚包括外壳、第二压缩弹簧、推动板,所述第二压缩弹簧的数量为两个,两个所述第二压缩弹簧的一端固定安装于所述滑动壳一侧的内壁,两个所述第二压缩弹簧的另一端均与所述推动板相焊接,所述滑动壳滑动连接于所述外壳内,所述滑动壳一侧的外壁设置有第五压缩弹簧,所述第五压缩弹簧上固定安装有卡块,所述外壳一侧的外壁开设有通孔。
15.作为优选,所述辅助脚包括固定板、转接座、第一铰连、第二铰连、滑动块、第三压缩弹簧、弹出板和支撑杆,所述转接座固定安装于所述固定板一侧的外壁,所述支撑杆铰接于所述转接座内,所述滑动块滑动连接于所述支撑杆的外壁,所述第一铰连与第二铰连的数量均为两个,所述第一铰连的一端铰接于所述第二铰连的一端。
16.作为优选,所述第一铰连远离所述第二铰连的一端与所述滑动块一侧的外壁相铰接,所述第二铰连远离所述第一铰连的一端铰接于所述滑动壳一侧的内壁,所述固定板一侧的外壁开设有方槽,所述第三压缩弹簧的数量为两个,两个所述第三压缩弹簧的一端均固定安装于所述方槽内,两个所述第三压缩弹簧的另一端与所述弹出板一侧的外壁相焊接。
17.作为优选,所述第一弧形瓣、第二弧形瓣和靠背一侧的外壁均填充有记忆棉。
18.作为优选,该方法具有以下步骤:
19.s1:将基板与行走训练车进行连接,将夹紧机构的第一弧形瓣、第二弧形瓣固定在患者肩部,使患者背部与靠背接触,使垫背与患者腰背部卡接。
20.s2:患者手推行走训练车,进行康复训练,当患者因手部支撑力量不足,向任一一侧跌落时,患者肩部发生偏转,通过靠背的插接杆驱动控制杆转动,使第一推动杆或是第二推动杆发生转动,再使第一推动杆或第二推动杆驱动同侧控制单元启动。
21.s3:当第一推动杆或是第二推动杆推动按钮件,按钮件推动限位块移动,使限位块移动至滑动壳内。
22.s4:当限位块完全位于滑动壳内时,第二压缩弹簧推动推动板沿外壳槽口方向移动,使滑动壳向外壳移动。
23.s5:当滑动壳滑动出外壳时,且滑动壳滑动出外壳时,第三压缩弹簧推动弹出板将支撑杆向外弹出,在支撑杆向外转动的同时拉动第一铰连和第二铰连,使滑动块滑动,当滑动块滑动一段距离以后,带动第一铰连和第二铰连保持固定,使滑动块保持固定,此时支撑杆与地面接触,整个辅助脚保持固定,此时滑动壳与地面接触。
24.现有技术相比,本发明的实施例所提供的神经内科患者康复用行走训练设备及其使用方法,可通过夹紧机构检测患者肩部位置来控制控制机构使控制机构内的控制杆使其
中一侧的控制单元控制支撑脚内的滑动壳向外弹出,为患者提供一个支撑作用力,防止患者因上肢力量不足而发生意外跌落,对患者造成二次伤害增重病情,在滑动壳向外弹出的同时可以带动辅助脚从滑动壳内向外转动,待滑动壳与地面接触以后,为滑动壳提供一个侧向的支撑作用力,防止患者进一步向一侧跌落。
25.应当理解,前面的一般描述和以下详细描述都仅是示例性和说明性的,而不是用于限制本公开。
26.本技术文件提供本公开中描述的技术的各种实现或示例的概述,并不是所公开技术的全部范围或所有特征的全面公开。
附图说明
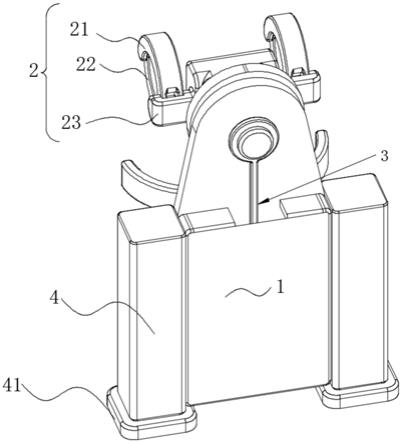
27.图1为本发明立体结构示意图;
28.图2为本发明正面立体结构示意图;
29.图3为本发明的a处放大结构示意图;
30.图4为本发明的控制机构内部结构示意图;
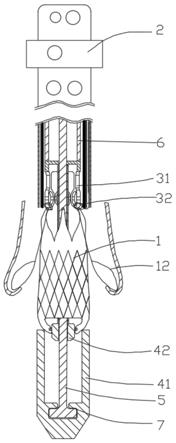
31.图5为本发明内部结构示意图;
32.图6为本发明的支撑脚内部结构示意图;
33.图7为本发明的b处放大示意图。
34.图中:1、基板;2、夹紧机构;21、第一弧形瓣;22、第二弧形瓣;23、靠背;3、控制机构;31、控制杆;32、第一推动杆;33、第二推动杆;34、控制单元;341、套管;342、第一压缩弹簧;343、按钮件;344、第四压缩弹簧;345、限位块;4、支撑脚;41、滑动壳;42、外壳;43、第二压缩弹簧;44、推动板;45、第五压缩弹簧;46、卡块;5、辅助脚;51、固定板;52、转接座;53、第一铰连;54、第二铰连;55、滑动块;56、第三压缩弹簧;57、弹出板;58、支撑杆。
具体实施方式
35.使得本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
36.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,还可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
37.如图1至图7所示,本发明提供的一种神经内科患者康复用行走训练设备及其使用方法,包括基板1,基板1一侧的外壁设置有固定患者肩部用的夹紧机构2,夹紧机构2贯穿并延伸至基板1的另一侧外壁,基板1一侧的外壁设置有控制机构3,且患者肩部施加作用力于夹紧机构2保持轴向摆动,并使控制机构3保持同步运动;基板1相对两侧的外壁均设置有支撑脚4,支撑脚4内设置沿支撑脚4槽口方向运动的滑动壳41,滑动壳41内设有辅助脚5,辅助
脚5被装配于当控制机构3向任一一侧保持偏转,并使同侧支撑脚4沿竖直方向向下,且辅助脚5向同侧旋转,夹紧机构2可通过检测患者肩部位置来控制控制机构3使控制机构3内的控制杆31使其中一侧的控制单元34控制支撑脚4内的滑动壳41向外弹出,为患者提供一个垂直方向的支撑作用力,防止患者因上肢力量不足而发生意外跌落,对患者造成二次伤害增重病情,在滑动壳41向外弹出的同时可以带动辅助脚5从滑动壳41内向外转动,待滑动壳41与地面接触以后,为滑动壳41提供一个侧向的支撑作用力,防止患者进一步向一侧跌落。
38.如图2所示,夹紧机构2包括第一弧形瓣21、第二弧形瓣22和靠背23,第一弧形瓣21和第二弧形瓣22的数量均为两个,第一弧形瓣21铰接于第二弧形瓣22内,两个第二弧形瓣22分别固定安装于靠背23的两端,靠背23铰接于基板1一侧的外壁,靠背23一侧的外壁固定安装有插接杆,且插接杆与控制机构3传动连接,第一弧形瓣21、第二弧形瓣22和靠背23一侧的外壁均填充有记忆棉,基板1一侧的外壁固定安装有垫背6,垫背6与患者腰部接触面上填充有记忆棉,在第一弧形瓣21、第二弧形瓣22与患者肩部接触的地方填充的记忆棉可以为患者提供较为舒适的使用感受,插接杆连接夹紧机构2的靠背23与控制机构3,保证了在夹紧机构2的靠背23发生偏转的同时能将控制机构3同步带动。
39.如图4所示,控制机构3包括控制杆31、第一推动杆32、第二推动杆33和控制单元34,第一推动杆32与第二推动杆33均铰接于基板1一侧的外壁,且第一推动杆32与第二推动杆33同轴心,控制单元34的数量为两个,两个控制单元34分别固定安装于基板1两侧的内壁,插接杆和控制杆31传动连接,保证了在靠背23在使用中因为患者的肩部位置发生改变时,能通过靠背23驱动控制杆31发生偏转,使第一推动杆32或者是第二推动杆33发生转动,再使第一推动杆32或第二推动杆33驱动同侧控制单元34启动。
40.如图7所示,控制单元34包括套管341、第一压缩弹簧342、按钮件343、第四压缩弹簧344和限位块345,第一压缩弹簧342的一端固定安装于套管341内,第一压缩弹簧342的另一端固定安装于按钮件343的一端,第四压缩弹簧344的一端固定安装于支撑脚4的外壁,第四压缩弹簧344的另一端与限位块345相焊接,限位块345的一端位于套管341内,在默认情况下,限位块345卡接在支撑脚4的滑动壳41上,防止滑动壳41在重力作用下向外滑动,第一压缩弹簧342套接在按钮件343的外壁,在第一推动杆32或者是第二推动杆33的作用力失去以后使按钮件343复位,在使用时按钮件343在第一推动杆32或者是第二推动杆33的作用下挤压限位块345,限位块345挤压第四压缩弹簧344往滑动壳41内移动,当限位块345完全移动至滑动壳41内时,滑动壳41可沿着外壳42槽口方向滑动。
41.如图5、6所示,支撑脚4包括外壳42、第二压缩弹簧43、推动板44,第二压缩弹簧43的数量为两个,两个第二压缩弹簧43的一端固定安装于滑动壳41一侧的内壁,两个第二压缩弹簧43的另一端均与推动板44相焊接,滑动壳41滑动连接于外壳42内,滑动壳41一侧的外壁设置有第五压缩弹簧45,第五压缩弹簧45上固定安装有卡块46,外壳42一侧的外壁开设有通孔,第二压缩弹簧43能在限位块345完全移动至滑动壳41内部时,推动推动板44沿外壳42槽口方向移动,并推动滑动壳41沿外壳41槽口方向弹出,第五压缩弹簧45在滑动壳41移动至一定位置时,将卡块46推入外壳42开设的通孔内,使滑动壳41与外壳42卡接,在使用完成以后,使用手将卡块46按动到滑动壳41内部,此时再将滑动壳41滑动至外壳42内部,且卡块46的直径大于套管341的内径。
42.如图3、4、6所示,辅助脚5包括固定板51、转接座52、第一铰连53、第二铰连54、滑动
块55、第三压缩弹簧56、弹出板57和支撑杆58,转接座52固定安装于固定板51一侧的外壁,支撑杆58铰接于转接座52内,滑动块55滑动连接于支撑杆58的外壁,第一铰连53与第二铰连54的数量均为两个,第一铰连53的一端铰接于第二铰连54的一端,第一铰连53远离第二铰连54的一端与滑动块55一侧的外壁相铰接,第二铰连54远离第一铰连53的一端铰接于滑动壳41一侧的内壁,固定板51一侧的外壁开设有方槽,第三压缩弹簧56的数量为两个,两个第三压缩弹簧56的一端均固定安装于方槽内,两个第三压缩弹簧56的另一端与弹出板57一侧的外壁相焊接,在默认情况下,支撑杆58位于外壳42内,且滑动壳41通过控制单元34与外壳42卡接,两个第三压缩弹簧56能在滑动壳41滑动出外壳42时,且滑动壳41滑动出外壳42时,推动弹出板57将支撑杆58向外弹出,在支撑杆58向外转动的同时拉动第一铰连53和第二铰连54,使滑动块55滑动,当滑动块55滑动一段距离以后,带动第一铰连53和第二铰连54保持固定,使滑动块55保持固定,此时支撑杆58与地面接触,整个辅助脚5保持固定。
43.而本发明在具体实施的过程中:
44.第一步:将基板1与行走训练车进行连接,将夹紧机构2的第一弧形瓣21、第二弧形瓣22固定在患者肩部,使患者背部与靠背23接触,使垫背6与患者腰背部卡接;
45.第二步:患者手推行走训练车,进行康复训练,当患者因手部支撑力量不足,向任一一侧跌落时,患者肩部发生偏转,通过靠背23的插接杆驱动控制杆31转动,使第一推动杆32或是第二推动杆33发生转动,再使第一推动杆32或第二推动杆33驱动同侧控制单元34启动;
46.第三步:当第一推动杆32或是第二推动杆33推动按钮件343,按钮件343推动限位块345移动,使限位块345移动至滑动壳41内;
47.第四步:当限位块345完全位于滑动壳41内时,第二压缩弹簧43推动推动板44沿外壳42槽口方向移动,使滑动壳41向外壳42移动;
48.第五步:当滑动壳41滑动出外壳42时,且滑动壳41滑动出外壳42时,第三压缩弹簧56推动弹出板57将支撑杆58向外弹出,在支撑杆58向外转动的同时拉动第一铰连53和第二铰连54,使滑动块55滑动,当滑动块55滑动一段距离以后,带动第一铰连53和第二铰连54保持固定,使滑动块55保持固定,此时支撑杆58与地面接触,整个辅助脚5保持固定,此时滑动壳41与地面接触。
49.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。