技术特征:
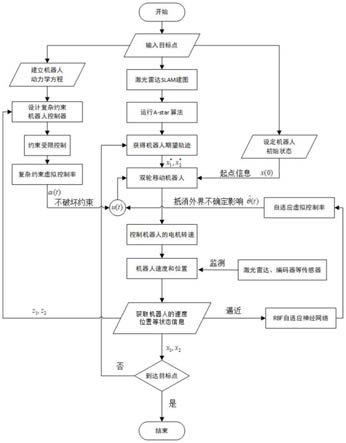
1.一种复杂约束下的移动机器人跟踪控制方法,其特征在于:包括以下步骤:步骤1、输入机器人的目标点,并设定机器人的初始状态,同时对机器人的每个部件进行受力分析,建立机器人的动力学模型,设置复杂约束机器人控制器;步骤2、遥控控制机器人使用二维激光雷达扫描周围环境,通过slam算法创建环境地图;步骤3、利用a
‑
star路径规划算法在所述环境地图中进行规划,并计算得到最优路径,从而获得机器人期望轨迹;步骤4、通过激光雷达、编码器实时监测机器人的状态信息;步骤5、设计复杂约束受限控制算法,根据机器人的实时状态信息,得到实际轨迹与期望轨迹的偏差,把此偏差输入到复杂约束机器人控制器,通过约束受限控制算法得到复杂约束虚拟控制律;步骤6、同时将机器人的实时状态信息反馈给rbf自适应神经网络,rbf自适应神经网络算法通过逼近未知非线性项,来确定自适应虚拟控制律步骤7、将复杂约束虚拟控制律和自适应虚拟控制律进行结合,得到最终的实际控制律;步骤8、实际控制律控制机器人的电机转速,来控制机器人持续平稳的运行;步骤9:判断机器人是否到达目标点,如果到达目标点,机器人停止运行,如果没有到达目标点,重复步骤3至8,直至到达目标点。2.如权利要求1所述的一种复杂约束下的移动机器人跟踪控制方法,其特征在于,步骤1中所述的动力学模型设计如下:步骤1.1、所述动力学方程描述如下:其中,q=[x,y]
t
表示位置向量,x和y分别表示机器人几何中心的横坐标和纵坐标。m(q)∈r2×2表示正定惯性矩阵,表示向心矩阵和科里奥利矩阵,表示地面摩擦,τ
d
表示未知有界扰动,b(q)∈r2×2表示输入变换式矩阵,τ∈r2×1表示力矩的输入矢量,并且τ=[τ
r
,τ
l
],a
t
(q)λ∈r2×1表示非完整约束力;步骤1.2、确定所述动力学方程模型后,定义x1=q=[x,y]
t
,,然后将所述动力学方程模型转换成下面形式:其中,x1为位置状态信息,x2为速度状态信息;g(t)表示系统的集总不确定性。3.如权利要求1所述的一种复杂约束下的移动机器人跟踪控制方法,其特征在于,步骤3中所述的a
‑
star路径规划算法如下:f(n)=g(n) h(n)其中g(n)表示从节点n到起始点的移动代价;f(n)表示第n个节点的综合优先级,算法
根据节点的优先级大小选择下一个要遍历的节点;h(n)表示节点n到终点的期望代价;所述a
‑
star路径规划算法完整步骤描述如下:步骤3.1、初始化开集和闭集;步骤3.2、把初始点放入开集,并设优先级为最高;步骤3.3、如果开集不为空,则从开集中选择优先级最高的节点作为节点n;步骤3.3.1、如果节点n是目标节点,则完成路径规划,跟踪父节点n从终点到起点;步骤3.3.2、如果节点n不是目标节点:将节点n从开集中移除,并置于闭集中;遍历节点n相邻的所有节点;步骤3.3.2.1、如果n相邻的节点m在闭集中:跳过并检测下一个节点;步骤3.3.2.2、如果n相邻的节点m既不在开集也不在闭集中,赋值n为m的父节点,计算m的优先级,将节点m加入开集;步骤3.3.2.3、如果n相邻的节点m在开集中:计算比较综合优先级f(m)的值,如果f(m)是开集中的最小值,则该节点m为父节点;步骤3.3.3、判断节点m是否为目标节点,如果节点m是目标节点,则完成路径规划,跟踪父节点m从终点到起点;如果节点m不是目标节点,重复步骤3.3.2~步骤3.3.2.3,直至到达目标节点。4.如权利要求3所述的一种复杂约束下的移动机器人跟踪控制方法,其特征在于,所述期望代价公式如下:其中n
x
,n
y
分别表示当前点的横纵坐标,中p
x
,p
y
分别表示目标点的横纵坐标。5.如权利要求1所述的一种复杂约束下的移动机器人跟踪控制方法,其特征在于,在步骤5中,所述复杂约束受限控制算法的设计包括速度约束受限控制算法的设计和位置约束受限控制算法的设计:步骤5.1、位置约束受限控制算法设计如下:采用backstepping的方法,基于对数函数z1为位置偏差,然后选取满足约束条件的lyapunov函数v1,v1>0,为满足位置约束条件的lyapunov函数,对所选取的lyapunov函数求一阶导数,并化简得到其中位置约束虚拟控制律拟控制律运用杨氏不等式使得进而确定合适的位置约束虚拟控制律α1;其中a1>2k1h1,b1<s1h1z1,a1、b1分别代表位置约束状态的上下限,a1、b1、k1均为常数;步骤5.2、速度约束受限控制算法设计如下:采用backstepping的方法,基于对数函数z2为速度偏差,然后选取满足约束条件的lyapunov函数v2,v2>0,为满足速度约束条件的lyapunov函数,对所
选取的lyapunov函数求一阶导数,并化简得到其中速度约束虚拟控制律拟控制律运用杨氏不等式使得进而确定合适的速度虚拟控制律α2;其中a2>2k2h2,b2<s2h2z2,a2、b2分别代表速度约束状态的上下限,a2、b2、k2均为常数;步骤5.3、综合位置约束虚拟控制律和速度约束虚拟控制律,得到的动态复杂约束虚拟控制律α(t)。6.如权利要求1所述的一种复杂约束下的移动机器人跟踪控制方法,其特征在于,在步骤6中所述rbf自适应神经网络是一种三层的神经网络,包括输入层、隐含层和输出层;输入层到隐含层的转换是非线性的,而隐含层到输出层的转换是线性的;所述rbf自适应神经网络算法设计如下:利用所述rbf自适应神经网络θ
t
φ(z) δ
z
(z),去近似不确定量g(t),使得g(t)=θ
t
φ(z) δ
z
(z)上述等式成立时对应的θ
t
,即为最合适的自适应虚拟控制律7.如权利要求5所述的一种复杂约束下的移动机器人跟踪控制方法,其特征在于,所述rbf自适应神经网络算法通过对未知非线性项逼近,最终确定的自适应虚拟控制律为其中z2为速度偏差,a2、b2为常数,φ(z)=[φ1(z),...,φ
l
(z)]
t
∈r
l
是高斯函数,为虚拟控制律的导数。8.如权利要求1所述的一种复杂约束下的移动机器人跟踪控制方法,其特征在于,步骤7中所述实际控制律为:其中m为正定惯性矩阵,τ∈r2×1表示力矩的输入矢量,对数函数表示力矩的输入矢量,对数函数z2为速度偏差,a2、b2、k为常数,为自适应虚拟控制律,φ(z)=[φ1(z),...,φ
l
(z)]
t
∈r
l
是高斯函数。
技术总结
本发明提供了一种复杂约束下的移动机器人跟踪控制方法。方法包括如下步骤:设定机器人的起点和目标点,通过SLAM算法,利用激光雷达建图,在此基础上利用A
技术研发人员:赵承浩 郑世祺 徐彬彬
受保护的技术使用者:中国地质大学(武汉)
技术研发日:2021.09.07
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。