1.本揭露有关于载具系统。
背景技术:
2.由于农业人口逐年减少与老化,导致传统农业人力缺工问题逐年严重。举例而言,对于采茶工作来说,现有便利于采茶工作的采茶工具包括双人式采茶刀,必须二人以上才能使用。在缺工的情况下,这样一类的双人式采茶刀便难以使用。而若使用更先进的其他采茶工具,则成本还需再增加,并且还有学习门槛的问题。
3.因此,如何提供一种人机协作的采集工具,借以在保留现有农业采集流程情况下,协助农民采收,是相关领域技术人员所感兴趣的课题。
技术实现要素:
4.本揭露的一态样有关于一种载具系统。
5.根据本揭露的一实施方式,一种载具系统包括载具机构、驱动系统、感测器以及控制系统。载具机构用以承载工作件。驱动系统传动载具机构于移动路径上移动。感测器侦测使用者的移动信息或指令,与载具机构的移动方向上的范围侦测内的环境信息。控制系统连接于驱动系统与感测器之间。控制系统接收使用者的移动信息,以及环境信息以建立侦测范围的地图,根据使用者的移动信息或者使用者的指令,并设置当前目标于地图的边界范围内。控制系统根据载具机构的当前位置与当前目标进行规划移动路径,并进行循迹路径移动。
6.在一或多个实施方式中,载具机构设置位于彼此平行的多个开放道路其中之一内。当载具机构转弯换行至另一开放道路,控制系统于地图建立虚拟障碍物,借以从边界区隔出无效段,使得当前目标设置于无效段以外的边界上。
7.在一或多个实施方式中,感测器还包括对准使用者的影像与深度相机(rgb-d camera),以感测使用者与载具机构的相对位置。控制系统进一步根据相对位置规划移动路径,以使载具机构与使用者保持并排平行移动。
8.在一或多个实施方式中,载具机构与使用者分别位于彼此平行的两相邻开放道路。载具机构用以承载的工作件包括双人收割机。双人收割机的一侧抵靠载具机构。使用者手持双人收割机的另一侧,以采收二相邻开放道路之间的作物。
9.在一些实施方式中,载具机构包括一固定机构与一高度调整模组。工作件通过固定机构固定于高度调整模组上,借以根据欲采收的作物的高度来调整工作件的高度。
10.在一或多个实施方式中,载具机构包括双履带底盘。驱动系统包括用以传动双履带底盘的电动马达。
11.在一或多个实施方式中,如前所述的载具系统进一步包括人机界面。人机界面连接控制系统,以供使用者下达移动指令,移动指令包括启动载具系统的自动转弯功能、手动调整载具机构移动速度与方向、停止载具机构移动等。人机界面还具有一显示装置可以显
示载具系统目前移动状态,供使用者读取。
12.在一或多个实施方式中,该控制系统进一步储存多个环境参数,并根据所述多个环境参数规划该移动路径。环境参数包括开放道路的多个宽度、开放道路之间的多个间距以及载具机构的回转半径。
13.在一或多个实施方式中,感测器包括光学雷达。光学雷达朝载具机构的移动方向发射光束,获得侦侧范围内的环境信息。
14.本揭露的另一态样有关于一种载具系统。
15.根据本揭露的一实施方式,一种载具系统包括载具机构、驱动系统、感测器以及控制系统。载具机构用以承载工作件。驱动系统传动载具机构于移动路径上移动。感测器包括对准使用者的深度相机,以感测使用者与载具机构的相对位置。控制系统用以根据相对位置规划移动路径,以使载具机构与使用者保持并排移动。
16.综上所述,本揭露提供一种能够实现人机协作的载具系统,载具系统用以承载现有的采收工具,能够智慧地实现自动转弯,并且还能够跟随使用者行走。如此,能够在保留现有农业相关的采收流程下协助采收。
17.应理解到,以上的一般说明与以下的详细描述都是通过示例做进一步说明,旨在为本揭露提供做进一步的解释,而不应以此限制本揭露。
附图说明
18.本揭露的优点与附图,应由接下来列举的实施方式,并参考附图,以获得更好的理解。这些附图的说明仅仅是列举的实施方式,因此不该认为是限制了个别实施方式,或是限制了揭露申请专利范围的范围。
19.图1根据本揭露的一实施方式绘示一载具系统的一方块示意图;
20.图2根据本揭露的一实施方式绘示一载具系统的一立体图;
21.图3a至图3d根据本揭露的一实施方式绘示一转弯路径规划方法中,载具系统于不同流程的多个示意图;
22.图4根据本揭露的另一实施方式绘示绘示一载具系统的一移动路径的一示意图;
23.图5根据本揭露的一实施方式绘示一载具系统与一使用者人机协作的一示意图;
24.图6根据本揭露的一实施方式绘示一载具系统的一控制方法的一流程图;以及
25.图7a至图7e分别绘示在图6的控制方法的不同流程下,载具系统与使用者的示意图。
26.【符号说明】
27.100:载具系统
28.110:载具机构
29.112:支架
30.114:高度调整模组
31.116:固定机构
32.118:双履带底盘
33.120:驱动系统
34.130:感测器
35.132:光学雷达
36.134:影像与深度相机
37.140:控制系统
38.142:电控箱
39.150:人机界面
40.200:双人采收机
41.200’:刀具
42.300:使用者
43.rd0,rd1,rd2:开放道路
44.r
t
:作物区域
45.w
rd
,w
t
:宽度
46.r:侦测距离
47.θ:侦测角度
48.m:侦测范围
49.bc:边界
50.vo:虚拟障碍物
51.po:实体障碍物
52.l:距离
53.t:当前目标
54.p,p’:路径
55.q1:起点
56.q2:终点
57.c1,c2,c3:圆弧曲线
58.dr
t
:已采收区域
具体实施方式
59.下文列举实施例配合所附附图进行详细说明,但所提供的实施例并非用以限制本揭露所涵盖的范围,而结构运作的描述非用以限制其执行的顺序,任何由元件重新组合的结构,所产生具有均等功效的装置,皆为本揭露所涵盖的范围。另外,附图仅以说明为目的,并未依照原尺寸作图。为使便于理解,下述说明中相同元件或相似元件将以相同的符号标示来说明。
60.除非另有定义,本文所使用的所有词汇(包括技术和科学术语)具有其通常的意涵,其意涵是能够被熟悉此领域者所理解。更进一步的说,上述的词汇在普遍常用的字典中的定义,在本说明书的内容中应被解读为与本揭露相关领域一致的意涵。除非有特别明确定义,这些词汇将不被解释为理想化的或过于正式的意涵。
61.在本文中所使用的用词“包含”、“包括”、“具有”、“含有”等等,均为开放性的用语,即意指包含但不限于。
62.于本文中,除非内文中对于冠词有所特别限定,否则“一”与“该”可泛指单一个或多个。将进一步理解的是,本文中所使用的“包含”、“包括”、“具有”及相似词汇,指明其所记
载的特征、区域、整数、步骤、操作、元件与/或组件,但不排除其所述或额外的其一个或多个其它特征、区域、整数、步骤、操作、元件、组件,与/或其中的群组。
63.本揭露提供一种能够用于人机协作的载具系统,借以不修改传统农业作业方式的情况下节省人力。举例而言,在传统的双人机械采茶流程中,必须要至少二名采茶工。二名采茶工分别位于茶树两侧,以共持横跨茶树的一台双人采茶机,使得双人采茶机的能够采集到茶树上的茶叶。而本揭露的载具系统能够取代其中一名采茶工,以人机协作方式完成传统的双人机械采茶流程。
64.图1根据本揭露的一实施方式绘示一载具系统100的一方块示意图。在本实施方式中,载具系统100包括载具机构110、驱动系统120、感测器130、控制系统140、人机界面150以及电源160。电源160分别连接驱动系统120、感测器130与控制系统140,借以提供电力。
65.载具机构110能够用于承载工作件。工作件包含但不限于双人采收机、机械手臂或是农药喷洒装置。双人采收机举例而言,包括双人采茶机。在一些实施方式中,载具机构110包括不同类型的车辆系统,并设置有用以固定工作件的固定机构116。驱动系统120则设置连接于载具机构110上,借以传动载具机构110移动。驱动系统120例如是电动马达,能够用以传动车辆的轮胎。
66.在本实施方式中,感测器130是用以侦测环境信息。控制系统140连接于感测器130与驱动系统120之间。控制系统140能够用以接收感测器130接收到的环境信息,借以规划移动路径并提供予驱动系统120。如此,驱动系统120便可以传动载具机构110于控制系统140规划的移动路径上移动。
67.具体而言,感测器130所侦测到的环境信息,可以包括载具机构110所处附近环境的地理信息,例如载具机构是位在开放道路上的何处,以及与茶树或障碍物的相对空间信息等。此外,在一些实施方式中,环境信息可以进一步包括载具系统100的使用者与载具机构110的相对位置。在使用者欲与载具系统100进行人机协作,则载具系统100的控制系统140便可以根据使用者与载具机构110的相对位置来规划移动路径,借以使载具机构110自动跟随使用者行走,从而替代人力。
68.进一步地,人机界面150连接至控制系统140。人机界面150能够呈现载具系统100的当前模式,并且使用者也可以通过人机界面150来控制载具机构110,借以下达移动指令。人机界面150可以具有显示装置,以显示载具系统100的载具机构110目前移动状态,供使用者读取。移动指令举例而言,包括启动自动转弯功能、手动调整移动速度与方向、停止载具机构移动等等。人机界面150上可以设置有自动按钮与转弯按钮。当使用者按住自动按钮,则载具机构110可以自动跟随使用者移动,直到使用者不再按住自动按钮,载具机构110离开自动模式而停止。随后,使用者可再按下转弯按钮,启动自动转弯功能,通过本揭露的一转弯路径规划方法,载具系统100的载具机构便能够自动转弯。在一些实施方式中,人机界面150使载具系统100进入遥控模式,使用者可以手动调整载具系统100的载具机构110的移动速度与方向,从而将载具系统100移动定位。
69.图2根据本揭露的一实施方式绘示一载具系统100的一立体图。应留意到,人机界面150是为使用者所持,为了简单说明的目的,使用者与人机界面150均未绘示于图2上。
70.在本实施方式中,驱动系统120为一电动马达。载具机构110为一双履带车辆,而能够较无障碍地于不同种类的地型上移动。载具机构110包括双履带底盘118。电源160为设置
于双履带底盘118上的电池。进一步地,在双履带底盘118上,载具机构110进一步包括支架112、高度调整模组114以及固定机构116。支架112设置于双履带底盘118带动的车体上。高度调整模组114设置于支架112上,并且固定机构116设置于高度调整模组114之上。如此,工作件便可以通过固定机构116固定于高度调整模组114上,以根据欲采收的作物的高度来调整工作件的高度。
71.在本实施方式中,感测器130包括光学雷达(lidar)132与影像与深度相机134。光学雷达132能够通过光学的方式来侦测道路,并借以实现直线侦测技术来获知道路的边界。光学雷达132是设置朝向载具机构110的移动方向来发射侦测用的光束,从而获得侦测范围内的环境信息。影像与深度相机134用以在人机协作时对准使用者,以获得使用者与载具机构110的相对位置,使载具系统100的控制系统140规划出与使用者并排行走的移动路径。在一些实施方式中,可以进一步通过影像与深度相机134来辨视使用者利用手势或肢体语言来下达的指令,借以使载具系统100根据指令移动。举例而言,使用者摆出向特定方向移动的手势,控制系统140便可以通过影像与深度相机134撷取使用者手势,经判别后指示驱动系统120使载具机构110向特定方向移动。在一些实施方式中,感测器130也包括麦克风,通过语音辨识技术,使用者可以口头向载具系统100发出指令。
72.在图2中,控制系统140是设置于电控箱142内。举例而言,控制系统140可以包括一个整合电脑,包括用以运算与规划移动路径的处理器,以及运算所需的记忆体。整合电脑例如是tx2电脑模组。控制系统140连接驱动模组120,借以使驱动模组120传动双履带底盘118带动整个载具系统100沿规划好的移动路径移动。
73.在本揭露中,控制系统140规划的移动路线,包括根据使用者位置规划以并排行走的移动路径,以及根据载具系统100所处环境所自动规划的转弯路径。本揭露载具系统100所处环境所自动规划的转弯路径,借以自动转弯换行的具体流程,请见以下说明。
74.图3a至图3d根据本揭露的一实施方式绘示一转弯路径规划方法中,载具系统100于不同流程的多个示意图。在本实施方式中,载具系统100是用于茶叶的采收为例,其设置于平行的开放道路rd1或rd2上,借以采收开放道路rd1与rd2之间作物区域r
t
的茶树的茶叶,但本揭露并不以此为限。开放道路rd1与rd2可以认为是茶树之间的茶道。
75.在图3a中,载具系统100是移动至于开放道路rd1的底端。此时,使用者通过人机界面150指示载具系统100向左转,借以从开放道路rd1转弯换行至开放道路rd2。载具系统100停止,而载具系统100的光学雷达132(如图2所示)朝向左侧侦测一侦测范围m。侦测范围m由侦测距离r以及侦测角度θ来定义出的扇形。边界bc是侦测范围m的边界。
76.一般而言,对于设计过的茶园,开放道路rd1与rd2可以认为是种植茶树的作物区域r
t
之间的茶道,并具有相同的宽度w
rd
,而各个作物区域r
t
也都具有相同的宽度w
t
,然而并不用以限定本揭露。
77.如图3a所示,在一些实施方式中,侦测距离r可以设置为2公尺,侦测角度θ总合为120度,包括以载具系统100移动方向为基准的顺时针15度到逆时针105度。若使用者通过人机界面150指示载具系统100右转,则载具系统100的光学雷达132可以朝载具系统100移动方向的右侧侦测,以提供另一个侦测角度总合为120度的侦测范围,其侦测距离设置为2公尺,侦测角度以载具系统100移动方向为基准从顺时针105度到逆时针15度。
78.控制系统140根据侦测范围m内的环境信息,便可以建立侦测范围m相应的地图,地
图内包括有开放道路rd1与作物区域r
t
的信息。在控制系统140建立的地图中,作物区域r
t
被设定为是障碍物的一种,因此控制系统140将不会规划与作物区域r
t
重叠的转弯路径作为移动路径,从而避免毁损到作物区域r
t
内的茶树。
79.控制系统140根据环境信息所建立的侦测范围m内的地图中,应包含开放道路rd1的部分、开放道路rd1与rd2的交界以及作为障碍物的作物区域r
t
。在建立的地图中,作为障碍物的部分将不会与移动路径重叠。侦测范围m的边界bc,对应到也是所建立地图的边界。
80.在本揭露中,是使用基于边界(frontier-based)的自主探勘(exploration)方法来规划移动路径。如此,控制系统140可以将载具系统100移动的目的地设置在已探索区域与未探索区域(未知边界)的交界,使得载具系统100能够持续朝未侦测的区域前进。
81.为此,对于载具系统100的控制系统140,可以选择将移动的当前目标设定于边界bc上。边界bc即为已探索区域与未探索区域的交界。然而,在转弯路径规划方法中,转弯的目的是为了使载具系统100从开放道路rd1换行至开放道路rd2。为避免载具系统100偏离开放道路rd1与开放道路rd2,如图3b所示,在本揭露的转弯路径规划方式中,控制系统140于建立的地图中设置虚拟障碍物vo。在一些实施方式中,虚拟障碍物vo与开放道路rd1或开放道路rd2的距离l为4公尺,并且虚拟障碍物vo阻隔开放道路rd1或开放道路rd2以外的道路,从而限制住移动路径。这对应到,在图3b中,边界bc为虚拟障碍物vo所阻障区隔的部分,将被视为无效段。控制系统140仅会将移动当前目标设置在无效段以外的边界bc。
82.在图3c中,绘示控制系统140是将当前目标t设置于为虚拟障碍物vo所区隔的无效段以外的边界bc。随后,如图3d所示,控制系统140便可以根据当前目标t与载具系统100的载具机构110的当前位置,来规划出局部的移动路径p。
83.如此一来,根据图3a至图3d呈现的流程,控制系统140便可以沿着虚拟障碍物vo来规划出转弯换行至开放道路rd2的多个局部的移动路径p。在一些实施方式中,可以利用动态视窗法(dynamic window)来设置移动路径p,控制系统140根据载具系统100当前的移动速度与角速度来设定避障策略,从而获得移动路径p。
84.请先参照图4。图4根据本揭露的另一实施方式绘示绘示一载具系统100的一移动路径p’的一示意图。载具系统100设置于开放道路rd1并欲转弯换行至开放道路rd2。开放道路rd1与rd2各自具有宽度w
rd
。开放道路rd1与rd2之间的作物区域r
t
则具有宽度w
t
。而在图4中,载具系统100所处的茶园具有实体障碍物po阻障,而为了转弯的目的,控制系统140于根据环境信息的地图中进一步设置虚拟障碍物vo。虚拟障碍物vo与开放道路rd1或rd2之间有距离l,距离l是用以作为载具机构110的回转宽度。
85.为了简单说明的目的,载具系统100未绘示于图上,而仅绘示出载具系统100的起点q1与终点q2。其中从起点q1到终点q2的移动路径p’,系由圆弧曲线c1、c2与c3及连接三者的直线所组成。
86.具体而言,在图4中,在动态视窗法的基础下,控制系统140可以进一步以reeds-shepp曲线的概念来来规划出移动路径p’。意即,移动路径p’的每一段局部移动路径,各自均为相同回转半径的圆的一部分。
87.一般而言,根据茶园土壤的环境、载具机构110本身的性能以及载具机构110本身的体积,会限制住载具机构110所能选用的回转半径。载具机构110所能选用的回转半径关系到其所能转弯的程度,因此,使用者当视载具系统100的载具机构110所处环境,选用载具
机构110的回转半径。
88.另一方面,开放道路rd1与rd2各自的宽度w
rd
,以及作物区域r
t
的宽度w
t
,也会限制载具系统100的载具机构110的移动路径。控制系统140当选择移动路径,避免载具系统100与作物区域与实体障碍物po接触。
89.综合以上,控制系统140根据环境信息,将可以储存多个环境参数,包括开放道路rd1与rd2各自的宽度w
rd
、作物区域r
t
的宽度w
t
以及虚拟障碍物vo与开放道路rd1与rd2之间的距离l。
90.在一些实施方式中,使用者应可根据茶园的设计,事先将开放道路各自的宽度w
rd
以及作物区域r
t
的宽度w
t
输入至控制系统140。虚拟障碍物vo与开放道路之间的距离l也可以事先设定输入。随后,控制系统140再根据这些环境参数来规划移动路径。在一些实施方式中,距离l为2.5公尺、作物区域r
t
的宽度w
t
约为1.2公尺,开放道路各自的宽度w
rd
约为1.5公尺至1.8公尺的范围内。
91.在reeds-shepp曲线概念的基础下,根据使用者选择的载具机构110的回转半径,可以有三种情况。其一,是载具机构110的回转半径小于作物区域r
t
的宽度w
t
,此时载具系统100的移动路径,可以仅由单一个圆弧所组成。其二,是载具机构110的回转半径介于作物区域r
t
的宽度w
t
以及作为回转宽度的距离l之间,则此时载具系统100的移动路径可以由二个圆弧部分与连接二个圆弧的直线所组成。第三种情况则如图4所示,载具机构110的回转半径大于作物区域r
t
的宽度w
t
以及作为回转宽度的距离l,则移动路径p’由二个以上的圆弧曲线c1、c2与c3,以及连接组成圆弧曲线c1、c2与c3的直线所组成。如图4所示,移动路径p’是由起点q1出发,沿圆弧曲线c1移动,随后沿连接圆弧曲线c1与c2的直线倒退至圆弧曲线c2的一端,沿圆弧曲线c2移动,再沿连接圆弧曲线c2与c3的直线倒退至圆弧曲线c3的一端,最后沿圆弧曲线c3移动到达终点q2。
92.回到图3d,控制系统140也可以基于reeds-shepp曲线的基础下,设置使路径p由多个圆弧曲线所组成。在一些实施方式中,控制系统140也可以在不知道开放道路的宽度w
rd
与作物区域r
t
的宽度w
t
的情况下,使用者选择较小的回转半径,使载具系统100根据自主探勘的演算法沿虚拟障碍物vo转弯换行至另一开放道路。如此,在作为驱动系统120的电动马达的扭力有限的情况下,载具系统100的控制系统140可以根据不同的外部阻力来适应性的调节可行的回转半径,随时重新规划最适合且可行的路径。外部阻力(包括开放道路rd1与rd2的土壤参数)。根据以上移动路径的规划,再加上来自土壤力学的加速度限制(具体而言,例如莫尔库伦破坏准则减bekker’s下沉阻力公式除上质量)后,控制系统140便可以确保移动路径是可以追踪不会使载具系统100的载具机构110的双履带底盘118无法动弹,同时也不会造成开放道路rd1与rd2土壤崩坏。
93.总体而言,在图3a至图3d与图4,针对载具系统100,使用者可以先对光学雷达132设置取用侦测范围m,并在载具系统100根据侦测到的环境信息建立的地图中设置虚拟障碍物vo,再通过载具系统100的控制系统140基于边界的自主探勘概念找到欲前往的当前目标,透过动态视窗法生成路径,使载具系统100的载具机构110能够在非特定环境中规划出预期的转弯路径。考量到载具机构110的驱动系统120特性(例如电动马达扭力)、载具机构110体积、周遭环境等因素,可以在已生成的移动路径中,取数个中继点作为局部当前目标,根据reeds-shepp曲线的概念,规划出由多个圆弧曲线组成的移动路径,进而使载具机构
110带动载具系统100整体准确到达欲目标点。应留意到,使用者得视需要设置虚拟障碍物vo,使得载具系统100转弯到并非最相邻于开放道路rd1的其他开放道路。如此一来,载具系统100便能够跟随使用者移动,并能够自动地执行转弯换行。而如前所述,本揭露的载具系统并包含但不限于茶叶采收产业。
94.在本揭露的一些实施方式中,载具系统100的并排行走,也可以通过类似如前所述的基于边界的自主探勘的算法,来实现并排行走的移动路径的规划。具体而言,当载具系统100位于开放道路(例如开放道路rd1、rd2)中,感测器130于一侦测范围内接收到开放道路内的环境信息,控制系统140透过直线侦测算法界定出开放道路的边缘,在建立并地图后将开放道路的边缘设置为已知区域。如此,控制系统140设置的当前目标便被限制在开放道路内,随后再根据使用者的移动信息或指令,包括使用者与载具系统100的相对位置,以及载具机构110的移动方向上的范围侦测内的环境信息,设置当前目标于地图的边界范围内。控制系统140并根据载具机构110的当前位置与当前目标进行规划开放道路内的移动路径,载具系统100并借以进行循迹路径移动,实现与使用者并排行走。
95.在一些实施方式中,本揭露的载具系统能够用于叶菜类植物采收。通过在载具系统装设相对应采收刀具,透过高度调整至适合姿态,以感测器撷取使用者的姿态,遂进行协作式采收,并侦测外界环境,于换行转弯时使机器自行操作转弯指令,以利叶菜类作物的采收进行。
96.在一些实施方式中,本揭露的载具系统能够用于温室内进行协作运作,如搬运及协作采摘作物,于载具系统上装设可协助搬运及采收的机械手臂,以感测器撷取使用者的姿态,遂进行协作式运作,并侦测外界环境,于换行转弯时使机器自行执行转弯指令,进行省工操作。
97.在一些实施方式中,本揭露的载具系统可以仅包括自动转弯换行的功能,而无需撷取使用者的姿态。例如,本揭露的载具系统可用于喷洒农药,将相对应器具装设于载具系统上,经姿态调整后,使用者由远端遥控载具系统,并经由感测器侦测田园环境,判断转弯处并执行转弯指令,实现远端协作式的农业操作。
98.为进一步说明本揭露的载具系统100如何应用于茶园中茶树的采收,请参照图5。图5根据本揭露的一实施方式绘示一载具系统100与一使用者300人机协作的一示意图。使用者300与载具系统100的载具机构110分别位于作物区域r
t
两侧的开放道路。作物区域r
t
种植茶树。而使用者300与载具机构110则共持横跨作物区域r
t
的双人采收机200。双人采收机200上设置有采收刀具,而能够借以采集作物区域r
t
中茶树的茶叶。
99.通过对准使用者300的影像与深度相机134,使用者300与载具系统100可以保持并排沿移动方向d平行前进。光学雷达132则可以沿载具系统100的移动方向d进行直线侦测,确保载具系统100是位于开放道路(茶道)内。
100.为了简单说明的目的,载具系统100的人机界面150未绘示于图5中。人机界面150实质为使用者300所持。使用者300再根据人机界面150上的自动按钮与转弯按钮,来指示或停止载具系统100的载具机构110的移动。
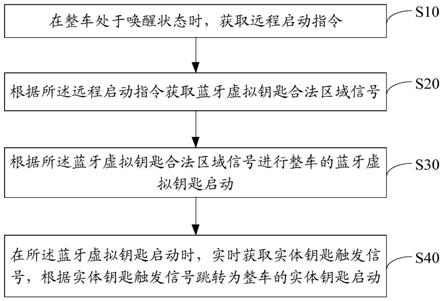
101.请参照图6,并同时参考图7a至图7e。图6根据本揭露的一实施方式绘示一载具系统100的一控制方法400的一流程图。图7a至图7e分别绘示在图6的控制方法的不同流程下,载具系统100与使用者300的示意图。
102.控制方法400包括流程410至流程450。在流程410,启动以开始载具系统100的运作。而如图7a至图7e所示,在本实施方式中,载具系统100是承载刀具200’,刀具200’涵盖的宽度仅有作物区域r
t
宽度的一半,但并不以此限制本揭露所使用的用于采收的刀具所能横跨的宽度。在一些实施方式中,刀具200’设置于如图5所示意的横跨作物区域r
t
的双人采收机200上,使用者300通过双人采收机200,以与载具系统100共持刀具200’,以通过刀具200’来采收作物区域r
t
,实现人机协作。在一些实施方式中,也可以将刀具200’直接架设在载具系统100上。为了简单说明的目的,在图7a至图7e仅绘示刀具200’。
103.进入到流程415,进入遥控模式,使用者300操作载具机构110移动载具系统100整体定位。如图7a所示,使用者300通过人机界面150,遥控载具系统100定位至开放道路rd0。此时人机界面150上显示为“遥控模式”。随后,将刀具200’设置于载具系统100的载具机构110上,通过高度调整模组114调整高度为合适使用者300的高度。最后,使用者300移动至平行于开放道路rd0的开放道路rd1,借以与载具系统100共持刀具200’。在本实施方式中,刀具200’可以设置于如图5所示的双人采收机200上,为了简单说明的目的,仅绘示出刀具200’。
104.回到流程420,载具系统100的控制系统140确认使用者300是否按下人机界面150的自动按钮。如否,载具系统100仍为遥控模式。如是,则进入到流程425,载具系统100进入自动模式,载具系统100的载具机构110通过影像与深度相机134保持与使用者300并排行走。此时,人机界面150显示为“自动模式”。
105.流程425如图7b所示,载具系统100与使用者300保持以相同移动方向d并排行走。与此同时,刀具200’采集作物区域r
t
中的茶叶,跟随载具系统100与使用者300,部分的作物区域r
t
被采集而变为已采收区域dr
t
。
106.在流程430,于自动模式下或遥控模式下,载具系统100的控制系统140确认使用者300是否按下人机界面150的转弯按钮。转弯按钮包括左转与右转。若否,则回到流程425,保持自动模式,这对应到一种防呆机制,若使用者300因故移开自动按钮,则载具系统100停止并进入遥控模式。而若否且再次按下自动按钮,载具系统100的控制系统140识别使用者300要解除自动模式,从而回到流程415,载具系统100回到遥控模式。如是,则进入到流程435,载具系统100进入到转弯询问模式,载具系统100通过人机界面150向使用者300询问使用者转弯意愿。使用者转弯意愿包括:使用者300是有确认要转弯,以及要往左还是往右转。此时,人机界面150呈现为“转弯询问模式”。
107.流程435如图7c所示。当载具系统100移动至开放道路rd0的底端,对应作物区域r
t
有一半已被刀具200’所采集,变为已采收区域dr
t
。此时,使用者300离开开放道路rd1,使载具系统100能够从开放道路rd0转弯换行至开放道路rd0。
108.进入到流程440,载具系统100确认使用者300是否按下人机界面150相同的转弯按钮,已确保使用者转弯意愿是否有误。若否,回到流程430。如是,则进入流程445,载具系统100进入转弯警示模式,载具系统100的载具机构110根据环境自动转弯,如图7d所示。此时,人机界面150显示为“转弯警示模式”。在流程445中载具机构110自动转弯的流程,如前的图3a至图3d或图4所示,在此不再重复说明。
109.在流程450,完成自动转弯,人机界面150供使用者300确认转弯完成,随后设定为自动模式,进入到流程425。如图7e所示,载具系统100换行至开放道路rd1,使用者300则移动到开放道路rd0,借以继续采收未被采集的作物区域r
t
。如此反复上述流程,便可以完成茶
园内茶叶的采集。应留意到,上述控制方法400包含但不限于茶叶的采集。
110.综上所述,本揭露提供一种载具系统,用以承载现有的农业工作件,设计能够于彼此平行的多个开放道路其中之一移动,并能够智慧地实现自动转弯换行至其他的开放道路中,从而协助处理开放道路之间的作物。进一步地,本揭露的载具系统可以感测使用者的姿态,跟随使用者行走,从而实现人机协作、共同采收的目的,能够在不改变传统双人采收作业(例如传统的机械双人采茶作业)的流程的情况下,以较低成本方式替代人力。
111.虽然本揭露已以实施例说明如上,但并不以此限定本揭露,任何熟悉此技艺者,在不脱离本揭露的精神和范围内,当可作各种的更动与润饰,因此本揭露的保护范围当视所附的权利要求书所界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。