1.本发明涉及图像处理技术领域,尤其是涉及一种图像校正方法、 装置、电子设备、存储介质。
背景技术:
2.现有通用的ois(光学防抖)、dis(数码防抖)、eis(电子防 抖)防抖方法可以减弱镜头焦距低倍率下的防抖问题。但是dis与 eis需要进行图像校正,例如在图像传感器横向高速转动时,画面需 大量裁剪,这会减小视场,ois的方案成本高昂。另外,超高镜头焦 距倍率下如摄像机端出现高频振动时,画面出现横向抖动和纵向压缩 问题,具体如图1所示,图1为超高镜头焦距倍率下如摄像机端出现 高频振动时,画面出现横向抖动问题的示意图。现有的通用的防抖方 法均无法解决该问题。
技术实现要素:
3.本发明提供一种图像校正方法、装置、电子设备、存储介质。该 方法能够减弱图像横向抖动以及纵向压缩问题,同时实现横向快速运 动倾斜偏移校准。
4.为解决上述技术问题,本发明提供的第一个技术方案为:提供一 种图像校正方法,包括:调高图像传感器的行运动频率,以使得所述 图像传感器的行运动频率大于预设行运动频率;利用所述图像传感器 进行图像拍摄,以得到第一图像。
5.其中,所述行运动频率小于10us/行。
6.其中,所述方法还包括:获取所述第一图像对应的陀螺仪参数; 利用所述陀螺仪参数得到图像传感器的姿态;基于所述图像传感器的 姿态以及所述陀螺仪参数计算得到校正参数;利用所述校正参数对所 述第一图像进行校正,以得到第二图像。
7.其中,所述利用所述陀螺仪参数得到图像传感器的姿态的步骤, 包括:获取所述陀螺仪的旋转矩阵;基于所述旋转矩阵以及所述陀螺 仪参数得到所述图像传感器的姿态。
8.其中,所述方法还包括:利用卡尔曼滤波算法对所述旋转矩阵进 行滤波。
9.其中,所述基于所述图像传感器的姿态以及所述陀螺仪参数计算 得到校正参数的步骤,包括:利用所述陀螺仪的旋转矩阵计算得到三 维旋转矩阵;利用所述三维旋转矩阵以及所述图像传感器的姿态计算 得到所述陀螺仪的参数矩阵;利用所述第一图像的像素点坐标、所述 陀螺仪的参数矩阵以及世界坐标计算得到所述图像传感器的内参,所 述校正参数为所述图像传感器的内参。
10.其中,所述方法包括:利用所述陀螺仪第一方向的旋转矩阵、第 二方向的旋转矩阵以及第三方向的旋转矩阵计算得到所述三维旋转 矩阵。
11.为解决上述技术问题,本发明提供的第二个技术方案为:提供一 种图像校正方法,包括:配置图像传感器的行运动频率为预设运动频 率;利用所述图像传感器进行图像拍摄,以得到第一图像;获取所述 第一图像对应的陀螺仪参数;利用所述陀螺仪参数得到所述图像传感 器的姿态;基于所述图像传感器的姿态以及所述陀螺仪参数计算得到 校正
参数;利用所述校正参数对所述第一图像进行校正,以得到第二 图像。
12.为解决上述技术问题,本发明提供的第三个技术方案为:提供一 种图像校正装置,包括:配置模块,调高图像传感器的行运动频率, 以使得所述图像传感器的行运动频率大于预设行运动频率;图像获取 模块,用于利用所述图像传感器进行图像拍摄,以得到第一图像。
13.为解决上述技术问题,本发明提供的第四个技术方案为:提供一 种图像校正装置,包括:配置模块,用于配置图像传感器的行运动频 率为预设运动频率;图像获取模块,用于利用所述图像传感器进行图 像拍摄,以得到第一图像;参数获取模块,用于获取所述第一图像对 应的陀螺仪参数;姿态计算模块,用于利用所述陀螺仪参数得到所述 图像传感器的姿态;计算模块,基于所述图像传感器的姿态以及所述 陀螺仪参数计算得到校正参数;校正模块,利用所述校正参数对所述 第一图像进行校正,以得到第二图像。
14.为解决上述技术问题,本发明提供的第三个技术方案为:提供一 种电子设备,包括:存储器和处理器,其中,存储器存储有程序指令, 处理器从存储器调取程序指令以执行上述任一项的方法。
15.为解决上述技术问题,本发明提供的第四个技术方案为:提供一 种计算机可读存储介质,存储有程序文件,程序文件能够被执行以实 现上述任一项的方法。
16.本发明的有益效果,区别于现有技术的情况,本发明调高图像传 感器的行运动频率,以使得所述图像传感器的行运动频率大于预设行 运动频率,然后利用所述图像传感器进行图像拍摄,以得到第一图像。 通过使得图像传感器运动在行高频运动频率下,进而减弱图像的横向 抖动以及纵向压缩问题,同时实现横向快速运动倾斜偏移校准。
附图说明
17.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例 描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的 附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在 不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图, 其中:
18.图1为图像横向抖动的第一实施例的示意图;
19.图2为本发明图像校正方法的第一实施例的流程示意图;
20.图3为图1所示的图像经过图2所示的方法后得到的图像示意 图;
21.图4为图像横向快速运动的第一实施例的示意图;
22.图5为图4所示的图像经过图2所示的方法后得到的图像示意 图;
23.图6为本发明图像校正方法的第二实施例的流程示意图;
24.图7为本发明图像校正装置的第一实施例的结构示意图;
25.图8为本发明图像校正方法的第三实施例的流程示意图;
26.图9为本发明图像校正装置的第二实施例的结构示意图;
27.图10为本发明电子设备的一实施例的结构示意图;
28.图11为本发明计算机可读存储介质的一实施例的结构示意图。
具体实施方式
29.cmos与ccd传感器是当前被普遍采用的两种图像传感器,两 者都是利用感光二极管进行光电转换,将图像转换为数字数据,两者 的主要差异是数字数据传送的方式不同。卷帘式cmos传感器的工 作原理是采用逐行曝光方式,各行像素曝光存在非同步性,导致同一 帧图像的不同行之间存在时差,当高速运动时,由于cmos传感器 逐行曝光的特性会产生果冻效应,即图像存在不同程度的畸变现象, 需要采取校正措施。
30.果冻效应是一个一直未能很好解决的问题,特别是在高倍率高频 抖动的场景,视频的防抖效果较差。现有通用的ois、dis、eis防 抖方法可以减弱镜头低倍率下的防抖问题,但是在超高倍率下如摄像 机端出现高频振动,画面出现横向抖动和纵向压缩问题,通用的防抖 方法均无法解决该问题。因此有必要提出一种解决上述果冻效应(或 rolling shutter效应)的技术方案,解决摄像机在拍摄视频过程中的抖 动,提升图像传感器画质。
31.本发明提供一种图像校正方法,该方法能够有效的降低图像的横 向抖动和纵向压缩问题。下面将结合本技术实施例中的附图,对本申 请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施 例仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中 的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得 的所有其他实施例,都属于本技术保护的范围。
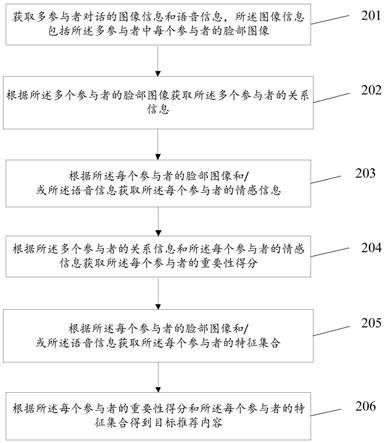
32.请参见图2,为本发明图像校正方法的第一实施例的流程示意图。 具体包括:
33.步骤s11:调高图像传感器的行运动频率,以使得所述图像传感 器的行运动频率大于预设行运动频率;
34.经过研究人员的长期研究发现,图像传感器工作在行高频速率 下,可极大减缓图像传感器行读出时间对高频振动物体的振动记录, 能够有效的解决果冻效应(或rolling shutter效应),例如横向抖动和 纵向压缩问题,并且大大提高了画质。
35.因此,在本实施例中,在进行拍摄之前,调高图像传感器的行运 动频率,使得图像传感器的行运动频率大于预设运动频率。需要说明 的是,预设运动频率为图像传感器正常进行拍摄时的正常行运动频 率,具体根据图像传感器的需求进行设置。在一实施例中,可以调高 图像传感器的行运动频率,使得图像传感器的行运动频率为图像传感 器能够支持的最大的运动频率。例如在一实施例中,可以调高图像传 感器的行运动频率,使得图像传感器的行运动频率小于10um/行。
36.在一实施例中,可以调高图像传感器的行运动频率,以使得所述 图像传感器的行运动频率大于预设行运动频率,并且配置图像传感器 工作在正常帧率下进行拍摄。
37.图像传感器的行运动频率的计算方法为:
38.row_frequency=hts/sclk;
39.其中,hts(horizontal timing length)为横向时序长度,sclk 指系统时钟,当图像传感器正常工作状态时,行运动频率较低,此时 需要根据调高图像传感器的行运动频率。例如将图像传感器的行运动 频率调至图像传感器能够支持的最大运动频率。在一实施例中,提高 图像传感器的行运动频率的方式包括:降低系统时钟的时间,或者, 还可以增加横向时序长度。
40.调高图像传感器的行运动频率,使得图像传感器工作在行高频速 率下,可极大减缓图像传感器行读出时间对高频振动物体的振动记 录,可通过修改保持图像传感器在行
高频速率模式下的低帧率实现, 不影响曝光时间和低照性能。例如,在可热融合应用方案中,热成像 设备制冷机带有高频振动的制冷设备,可见光设备使用的图像传感器 为rolling shutter(卷帘快门)图像传感器,其逐行曝光的特性记录 高频振动的制冷设备振动,使得图像画面产生横向抖动和纵向压缩特 性,如图1所示,图1为横向抖动问题效果。
41.步骤s12:利用图像传感器进行图像拍摄,以得到第一图像。
42.利用图像传感器进行图像拍摄,以得到第一图像。具体的,在本 实施例中,调高图像传感器的行运动频率,以使得所述图像传感器的 行运动频率大于预设行运动频率,然后利用调节后的图像传感器进行 图像拍摄,得到的图像为图3所示。
43.具体的,图1中,由于运动物体(例如制冷机)的高频振动,图 像画面出现明显横向抖动问题。由上图3可看出,使用行高频速率校 正图像方案可大幅度缓解高频振动情况下的滚动横向抖动问题,纵向 压缩问题也是相同的解决方案。
44.在一具体实施例中,在ptz图像传感器横向转动方案中,可见 光设备使用的为rolling shutter图像传感器,其逐行曝光的特性记录 快速横向转动瞬时图像,使得图像纵向竖线变斜,具体如图4所示。 使用行高频速率读出方案可大幅缓解快速横向转动时的倾斜问题,具 体如图5所示。图像传感器工作在行高频速率读出速率时,图像传感 器的行间间隔时间短,由于此时图像传感器每行快速读出,等效时间 内读出的行数更多,横向偏移更小,进而缓解横向抖动问题,同时 实现横向快速运动倾斜偏移校准。
45.在一具体实施例中,如图4所示,使用行高频速率读出方案可大幅 缓解快速横向转动时的倾斜问题,图像传感器工作在行高频速率读出速 率时,图像传感器的行间间隔时间短,由于此时图像传感器每行快速读 出,等效时间内读出的行数更多,横向偏移更小。如果图像传感器本身 支持的最大行高频速率不足的情况下,可在此基础上添加rolling shutter 校正方法,方法如下:根据rolling shutter曝光原理,记录第i帧视频图 像中某一像素点的曝光时间,进一步可根据各行像素点的曝光时间用陀 螺仪角度和相应时间进行插值得到每行的实际抖动值。然后基于每行的 实际抖动至进行校正。
46.具体的,像素点记为u=[u
x
,u
y
]
t
,像素点u的曝光时间表示为:
[0047][0048]
其中,t
i
是第i帧的时间戳,h是每帧图像的总行数,t
r
是每帧读 出时间。
[0049]
本实施例中,图像传感器工作在行高频速率时,图像传感器行运 行频率高,此时图像传感器曝光处于高频运动状态,其等效工作频率 增高,记录制冷机振动时间频率变短,横向振动与纵向压缩问题明显 减弱。图像传感器工作在行高频速率下,可极大减缓ptz图像传感 器快速横向运动导致的rolling shutter效应,可通过修改图像传感器的 运动频率,使其保持在低帧率模式下,不影响曝光时间和低照性能。
[0050]
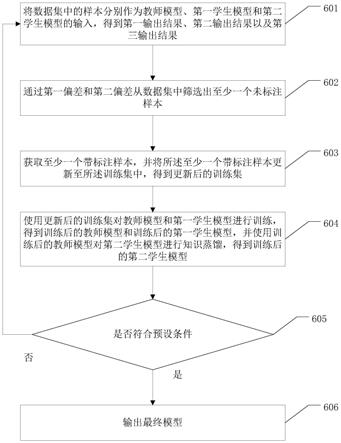
请参见6,为本发明图像校正方法的第二实施例的流程示意图, 其中步骤s61、步骤s62与上述图2所示的第一实施例中的步骤s11、 步骤s12相同,区别在于,步骤s62之后还包括:
[0051]
步骤s63:获取所述第一图像对应的陀螺仪参数。
[0052]
具体的,由于陀螺仪的工作频率与图像传感器的工作频率不同, 为了确保陀螺仪与图像传感器的运动位移同步,则需要将陀螺仪与图 像传感器的时间戳同步。使得图像传
感器在输出第一图像时,陀螺仪 同时输出第一图像所对应的时间的陀螺仪参数。陀螺仪参数为角速度 值。
[0053]
步骤s64:利用所述陀螺仪参数得到图像传感器的姿态。
[0054]
可以通过陀螺仪的参数得到图像传感器的姿态。在一实施例中, 首先获取陀螺仪的旋转矩阵;基于所述旋转矩阵以及所述陀螺仪参数 得到所述图像传感器的姿态。具体的,可以根据陀螺仪角频率配置陀 螺仪旋转矩阵。
[0055]
在一实施例中,例如陀螺仪x方向的旋转矩阵为:
[0056][0057]
陀螺仪y方向的旋转矩阵为:
[0058][0059]
陀螺仪z方向的旋转矩阵为:
[0060][0061]
其中,θ
x
为陀螺仪x方向的旋转角度,θ
y
为陀螺仪y方向的旋 转角度,θ
z
为陀螺仪z方向的旋转角度。
[0062]
此时,已知陀螺仪的旋转矩阵和陀螺仪参数,利用陀螺仪参数乘 以陀螺仪的旋转矩阵即可得到图像传感器的姿态。
[0063]
在另一实施例中,由于实际在图像传感器防抖时需要排除主观运 动校正,仅校正主观抖动部分,可以利用卡尔曼滤波算法对所述旋转 矩阵进行滤波。使用卡尔曼滤波进行路径平滑,使得主观运动与抖动 分离,实际仅校正抖动部分,提高算法的鲁棒性。具体的,也可以使 用非线性滤波算法进行本步骤。利用陀螺仪参数乘以滤波后的陀螺仪 的旋转矩阵即可得到图像传感器的姿态。
[0064]
步骤s65:基于所述图像传感器的姿态以及所述陀螺仪参数计算 得到校正参数。
[0065]
在一实施例中,利用陀螺仪的旋转矩阵计算得到三维旋转矩阵。 具体的,陀螺仪的旋转矩阵包括陀螺仪第一方向(x方向)的旋转矩 阵rx,陀螺仪第二方向(y方向)的旋转矩阵ry,陀螺仪第三方向 (z方向)的旋转矩阵rz。三维旋转矩阵为r3d=rx
×
ry
×
rz。
[0066]
利用三维旋转矩阵以及所述图像传感器的姿态计算得到所述陀 螺仪的参数矩阵。假设图像传感器的姿态为rp,陀螺仪参数矩阵r=rp
×
r3d。
[0067]
利用所述第一图像的像素点坐标、所述陀螺仪的参数矩阵以及世 界坐标计算得到所述图像传感器的内参,所述校正参数为所述图像传 感器的内参。具体计算方式为:x=krx;其中,x为第一图像的像素 点坐标,x为世界坐标,k为图像传感器的内参,r为陀螺仪的参数 矩阵。计算得到图像传感器的内参k后,即可得到校正参数。具体 的,图像传感器的内参k即为校正参数。
[0068]
在一实施例中,可以采用参数搜索的方式得到最优的校正参数。
[0069]
步骤s66:利用所述校正参数对所述第一图像进行校正,以得到 第二图像。
[0070]
具体的,将校正参数带入第一图像中对第一图像进行校正,进而 得到第二图像。
[0071]
在校正过程中,会出现部分运动超出画面幅值,部分角落无细节 等问题,需对第一图像四周画面进行裁剪。为保证出现较大抖动时画 面仍正常,需进行对四周像素的最大偏移量做限制,防止画面偏移幅 度过大。
[0072]
通过本实施例的方法,能够进一步解决图像抖动问题。
[0073]
本发明的图像校正方法中,调高图像传感器的行运动频率,使得 图像传感器工作在行高频频率下,即可在一定程度上减弱横向抖动和 纵向压缩问题,操作简单,成本低。为了进一步减弱图像抖动问题, 引入了图像传感器的内参以及陀螺仪的参数进行校正。
[0074]
具体的,本技术中,利用图2所示的图像校正方法,部分sensor 支持的行运动频率过低,可能导致校正效果不足,但是操作简单,成 本低,不需要对图像进行裁剪。利用图6所示的图像校正方法,需要 引入图像传感器的内参以及陀螺仪的参数的计算,计算复杂,需要对 图像进行裁剪,但是校正精度高。因此在实际应用中,可以根据需求 选择合适的校正方法。
[0075]
请参见图7,为本发明图像校正装置的第一实施例的结构示意图。 具体包括:配置模块71、图像获取模块72。
[0076]
其中,配置模块71用于调高图像传感器的行运动频率,以使得 所述图像传感器的行运动频率大于预设行运动频率。
[0077]
经过研究人员的长期研究发现,图像传感器工作在行高频速率 下,可极大减缓图像传感器行读出时间对高频振动物体的振动记录, 能够有效的解决果冻效应(或rolling shutter效应),例如横向抖动和 纵向压缩问题,并且大大提高了画质。
[0078]
因此,在本实施例中,在进行拍摄之前,利用配置模块71调高 图像传感器的行运动频率,使得图像传感器的行运动频率大于预设运 动频率。需要说明的是,预设运动频率为图像传感器正常进行拍摄时 的正常行运动频率,具体根据图像传感器的需求进行设置。在一实施 例中,可以调高图像传感器的行运动频率,使得图像传感器的行运动 频率为图像传感器能够支持的最大的运动频率。例如在一实施例中, 可以调高图像传感器的行运动频率,使得图像传感器的行运动频率小 于10um/行。
[0079]
在一实施例中,可以利用配置模块71调高图像传感器的行运动 频率,以使得所述图像传感器的行运动频率大于预设行运动频率,并 且配置图像传感器工作在正常帧率下进行拍摄。
[0080]
图像传感器的行运动频率的计算方法为:
[0081]
row_frequency=hts/sclk;
[0082]
其中,hts(horizontal timing length)为横向时序长度,sclk 指系统时钟,当图像传感器正常工作状态时,行运动频率较低,此时 需要根据调高图像传感器的行运动频率。例如将图像传感器的行运动 频率调至图像传感器能够支持的最大运动频率。在一实施例中,利用 配置模块71提高图像传感器的行运动频率的方式包括:利用配置模 块71降低系统时钟的时间,或者,还可以利用配置模块71增加横向 时序长度。
[0083]
利用配置模块71调高图像传感器的行运动频率,使得图像传感 器工作在行高频
速率下,可极大减缓图像传感器行读出时间对高频振 动物体的振动记录,可通过修改保持图像传感器在行高频速率模式下 的低帧率实现,不影响曝光时间和低照性能。例如,在可热融合应用 方案中,热成像设备制冷机带有高频振动的制冷设备,可见光设备使 用的图像传感器为rolling shutter(卷帘快门)图像传感器,其逐行 曝光的特性记录高频振动的制冷设备振动,使得图像画面产生横向抖 动和纵向压缩特性,如图1所示,图1为横向抖动问题效果。
[0084]
图像获取模块72用于利用所述图像传感器进行图像拍摄,以得 到第一图像。
[0085]
具体的,图像获取模块72利用图像传感器进行图像拍摄,以得 到第一图像。具体的,在本实施例中,利用配置模块71调高图像传 感器的行运动频率,以使得所述图像传感器的行运动频率大于预设行 运动频率,然后图像获取模块72利用调节后的图像传感器进行图像 拍摄,得到的图像为图3所示。
[0086]
具体的,图1中,由于运动物体(例如制冷机)的高频振动,图 像画面出现明显横向抖动问题。由上图3可看出,使用行高频速率校 正图像方案可大幅度缓解高频振动情况下的滚动横向抖动问题,纵向 压缩问题也是相同的解决方案。
[0087]
在一具体实施例中,在ptz图像传感器横向转动方案中,可见 光设备使用的为rolling shutter图像传感器,其逐行曝光的特性记录 快速横向转动瞬时图像,使得图像纵向竖线变斜,具体如图4所示。 使用行高频速率读出方案可大幅缓解快速横向转动时的倾斜问题,具 体如图5所示。图像传感器工作在行高频速率读出速率时,图像传感 器的行间间隔时间短,由于此时图像传感器每行快速读出,等效时间 内读出的行数更多,横向偏移更小,进而缓解横向抖动问题。
[0088]
本实施例中,图像传感器工作在行高频速率时,图像传感器行运 行频率高,此时图像传感器曝光处于高频运动状态,其等效工作频率 增高,记录制冷机振动时间频率变短,横向振动与纵向压缩问题明显 减弱。图像传感器工作在行高频速率下,可极大减缓ptz图像传感 器快速横向运动导致的rolling shutter效应,可通过修改图像传感器的 运动频率,使其保持在低帧率模式下,不影响曝光时间和低照性能。
[0089]
请参见图8,为本发明图像校正方法的第三实施例的流程示意图, 其中,步骤s83至步骤s86与上述图6所示的第二实施例相同,区别 在于,本实施例在步骤s83之前还包括:
[0090]
步骤s81:配置图像传感器的行运动频率为预设运动频率。
[0091]
本实施例中,配置图像传感器的行运动频率为预设运动频率,预 设运动频率为图像传感器进行工作时的正常运动频率。
[0092]
步骤s82利用所述图像传感器进行图像拍摄,以得到第一图像。
[0093]
利用图像传感器进行图像拍摄,以得到第一图像。本实施例中, 第一图像为图1所示的图像。具体的,在可热融合应用方案中,热成 像设备制冷机带有高频振动的制冷设备,可见光设备使用的图像传感 器为rolling shutter(卷帘快门)图像传感器,其逐行曝光的特性记 录高频振动的制冷设备振动,使得图像画面产生横向抖动和纵向压缩 特性,如图1所示,图1为横向抖动问题效果。
[0094]
本实施例中,通过步骤s83至步骤s86的方式对第一图像进行校 正,进而得到第二图像,以此解决横向抖动或者纵向压缩问题。具体 的,本实施例引入图像传感器的内参以及陀螺仪的参数进行校正,可 在一定程度上缓解图像抖动或者纵向压缩问题。
[0095]
利用图8所示的图像校正方法,需要引入图像传感器的内参以及 陀螺仪的参数的计算,计算复杂,需要对图像进行裁剪,但是校正精 度高。
[0096]
请参见图9,为本发明图像校正装置的第二实施例的结构示意图, 具体包括:配置模块91、图像获取模块92、参数获取模块93、姿态 计算模块94、计算模块95以及校正模块96。
[0097]
其中,配置模块91用于配置图像传感器的行运动频率为预设运 动频率。
[0098]
本实施例中,配置模块91配置图像传感器的行运动频率为预设 运动频率,预设运动频率为图像传感器进行工作时的正常运动频率。
[0099]
图像获取模块92用于利用所述图像传感器进行图像拍摄,以得 到第一图像。本实施例中,第一图像为图1所示的图像。具体的,在 可热融合应用方案中,热成像设备制冷机带有高频振动的制冷设备, 可见光设备使用的图像传感器为rolling shutter(卷帘快门)图像传 感器,其逐行曝光的特性记录高频振动的制冷设备振动,使得图像画 面产生横向抖动和纵向压缩特性,如图1所示,图1为横向抖动问题 效果。
[0100]
参数获取模块93用于获取所述第一图像对应的陀螺仪参数。具 体的,由于陀螺仪的工作频率与图像传感器的工作频率不同,为了确 保陀螺仪与图像传感器的运动位移同步,参数获取模块93则需要将 陀螺仪与图像传感器的时间戳同步。使得图像传感器在输出第一图像 时,陀螺仪同时输出第一图像所对应的时间的陀螺仪参数。陀螺仪参 数为角速度值。
[0101]
姿态计算模块94用于利用所述陀螺仪参数得到所述图像传感器 的姿态。在一实施例中,姿态计算模块94可以通过陀螺仪的参数得 到图像传感器的姿态。在另一实施例中,姿态计算模块94首先获取 陀螺仪的旋转矩阵;基于所述旋转矩阵以及所述陀螺仪参数得到所述 图像传感器的姿态。具体的,可以根据陀螺仪角频率配置陀螺仪旋转 矩阵。
[0102]
在一实施例中,例如陀螺仪的旋转矩阵包括x方向的旋转矩阵、 y方向的旋转矩阵以及z方向的旋转矩阵。
[0103]
此时,已知陀螺仪的旋转矩阵和陀螺仪参数,姿态计算模块94 利用陀螺仪参数乘以陀螺仪的旋转矩阵即可得到图像传感器的姿态。
[0104]
在另一实施例中,由于实际在图像传感器防抖时需要排除主观运 动校正,仅校正主观抖动部分,姿态计算模块94可以利用卡尔曼滤 波算法对所述旋转矩阵进行滤波。使用卡尔曼滤波进行路径平滑,使 得主观运动与抖动分离,实际仅校正抖动部分,提高算法的鲁棒性。 具体的,也可以使用非线性滤波算法进行本步骤。利用陀螺仪参数乘 以滤波后的陀螺仪的旋转矩阵即可得到图像传感器的姿态。
[0105]
计算模块95基于所述图像传感器的姿态以及所述陀螺仪参数计 算得到校正参数。
[0106]
在一实施例中,计算模块95利用陀螺仪的旋转矩阵计算得到三 维旋转矩阵。具体的,陀螺仪的旋转矩阵包括陀螺仪第一方向(x方 向)的旋转矩阵rx,陀螺仪第二方向(y方向)的旋转矩阵ry,陀 螺仪第三方向(z方向)的旋转矩阵rz。三维旋转矩阵为r3d=rx
×ꢀ
ry
×
rz。
[0107]
计算模块95利用三维旋转矩阵以及所述图像传感器的姿态计算 得到所述陀螺仪的参数矩阵。假设图像传感器的姿态为rp,陀螺仪 参数矩阵r=rp
×
r3d。
[0108]
计算模块95利用所述第一图像的像素点坐标、所述陀螺仪的参 数矩阵以及世界坐标计算得到所述图像传感器的内参,所述校正参数 为所述图像传感器的内参。具体计算方式为:x=krx;其中,x为第 一图像的像素点坐标,x为世界坐标,k为图像传感器的内参,r为 陀螺仪的参数矩阵。计算模块95计算得到图像传感器的内参k后, 即可得到校正参数。具体的,图像传感器的内参k即为校正参数。
[0109]
校正模块96利用所述校正参数对所述第一图像进行校正,以得 到第二图像。
[0110]
具体的,校正模块96将校正参数带入第一图像中对第一图像进 行校正,进而得到第二图像。
[0111]
在校正过程中,会出现部分运动超出画面幅值,部分角落无细节 等问题,校正模块96在进行校正时,需对第一图像四周画面进行裁 剪。为保证出现较大抖动时画面仍正常,需进行对四周像素的最大偏 移量做限制,防止画面偏移幅度过大。
[0112]
本实施例的图像校正装置,需要引入图像传感器的内参以及陀螺 仪的参数的计算,计算复杂,需要对图像进行裁剪,但是校正精度高。
[0113]
请参见图10,为本发明电子设备的一实施例的结构示意图,电 子设备包括相互连接的存储器202和处理器201。
[0114]
存储器202用于存储实现上述任意一项的方法的程序指令。
[0115]
处理器201用于执行存储器202存储的程序指令。
[0116]
其中,处理器201还可以称为cpu(central processing unit,中 央处理单元)。处理器201可能是一种集成电路芯片,具有信号的处 理能力。处理器201还可以是通用处理器、数字信号处理器(dsp)、 专用集成电路(asic)、现场可编程门阵列(fpga)或者其他可编 程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。通用处理 器可以是微处理器或者该处理器也可以是任何常规的处理器等。
[0117]
存储器202可以为内存条、tf卡等,可以存储设备的电子设备 中全部信息,包括输入的原始数据、计算机程序、中间运动结果和最 终运动结果都保存在存储器中。它根据控制器指定的位置存入和取出 信息。有了存储器,电子设备才有记忆功能,才能保证正常工作。电 子设备的存储器按用途可分为主存储器(内存)和辅助存储器(外存),也 有分为外部存储器和内部存储器的分类方法。外存通常是磁性介质或 光盘等,能长期保存信息。内存指主板上的存储部件,用来存放当前 正在执行的数据和程序,但仅用于暂时存放程序和数据,关闭电源或 断电,数据会丢失。
[0118]
在本技术所提供的几个实施例中,应该理解到,所揭露的方法和 装置,可以通过其它的方式实现。例如,以上所描述的装置实施方式 仅仅是示意性的,例如,模块或单元的划分,仅仅为一种逻辑功能划 分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结 合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另 一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是 通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机 械或其它的形式。
[0119]
作为分离部件说明的单元可以是或者也可以不是物理上分开的, 作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一 个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选 择其中的部分或者全部单元来实现本实施方式方案的目的。
[0120]
另外,在本技术各个实施例中的各功能单元可以集成在一个处理 单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单 元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现, 也可以采用软件功能单元的形式实现。
[0121]
集成的单元如果以软件功能单元的形式实现并作为独立的产品 销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样 的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分 或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计 算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计 算机设备(可以是个人计算机,系统服务器,或者网络设备等)或处 理器(processor)执行本技术各个实施方式方法的全部或部分步骤。
[0122]
请参阅图11,为本发明计算机可读存储介质的结构示意图。本 申请的存储介质存储有能够实现上述所有方法的程序文件203,其中, 该程序文件203可以以软件产品的形式存储在上述存储介质中,包括 若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或 者网络设备等)或处理器(processor)执行本技术各个实施方式方法 的全部或部分步骤。而前述的存储装置包括:u盘、移动硬盘、只读 存储器(rom,read
‑
only memory)、随机存取存储器(ram,randomaccess memory)、磁碟或者光盘等各种可以存储程序代码的介质, 或者是计算机、服务器、手机、平板等终端设备。
[0123]
以上仅为本发明的实施方式,并非因此限制本发明的专利范围, 凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换, 或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专 利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。