1.本实用新型涉及一种喂料上甄,特别是涉及一种智能喂料上甄一体机器人,属于喂料上甄技术领域。
背景技术:
2.在白酒酿造行业是中国特有的制造行业,白酒是以粮食为主原料,需要经过固态发酵、蒸桶和蒸馏等工序,传统的制造方法主要依靠人工进行完成,对于人工的经验依赖性较强,需要大量人力才能进行完成,劳动成本较高且生产效率较低,上甄品质受员工体力情绪等影响不稳定。
3.现有的市场已有的上甄机器人多采用标准多关节机器人配合末端执行布料机构的形式来实现不了,分为间歇上甄和连续上甄两类,间歇上甄采用两个机器人相互配合作用,一个机器人用于抓取抛洒撒醅,另外一个机器人应用于接料和布料,在机器人接料过程时,如果甑桶内出现跑气现象,机器人主要由进料口、内置物料传送装置,出料口和多关节机器人本体,内嵌的传送装置使得机器人可以实现连续性铺料与间歇上料相比,上甄机器人中撒醅的运动轨迹更加合理,同时提高了布料响应速度。
4.针对手工白酒酿造场地狭窄,甄锅分散跨度较大,配梁区域占地较宽,清洁较为麻烦,白酒上甄讲究“装甄要输送,动作要轻快,上汽要均匀,甄料不能太厚且要平整,见汽盖料,盖料要准确”,现有的上甄依靠全人手动操作,人劳动强度大,效率低,探汽不准确,上甄不均匀,酶甄出酒率,酒品偏差较大。
技术实现要素:
5.本实用新型的主要目的是为了提供一种智能喂料上甄一体机器人。
6.本实用新型的目的可以通过采用如下技术技术方案达到:
7.一种智能喂料上甄一体机器人,包括装料抱斗、喂料斗和抱斗连接件,所述装料抱斗顶部中间处安装有抱斗连接件,所述喂料斗上设有操作组件,所述喂料斗底部一侧设有喂料密封组件,所述喂料斗底部一侧中间处安装有支撑底座行走组件,所述喂料密封组件底部车设有导杆插孔定位组件,所述导杆插孔定位组件底部处设有料盘酒甄组件。
8.优选的,所述操作组件包括操作平台和梯子,所述操作平台安装在所述喂料斗一侧处,所述梯子安装在所述喂料斗一侧中间处。
9.所述喂料密封组件包括上甄喂料机和封盖,所述封盖安装在所述喂料斗一侧处,所述上甄喂料机设在所述喂料斗底部处。
10.优选的,所述支撑底座行走组件包括旋转支撑、底座、行走轮和轨道,所述旋转支撑安装在所述上甄喂料机底部一端处,所述底座安装在所述旋转支撑底部处,所述行走轮安装在所述底座底部处,所述轨道设在所述底座底部两侧处。
11.优选的,所述导杆插孔定位组件包括上甄下料叶片、甄锅提升导向杆、导向轴承总成、第一插孔、第二插入孔和定位架,所述第一插孔开设在所述封盖两侧中间处,所述甄锅
提升导向杆插入至所述第一插孔中间处,所述定位架设在所述封盖底部处,所述第二插入孔开设在所述定位架中间两侧处,所述导向轴承总成设在所述甄锅提升导向杆底部中间处,且所述导向轴承总成插入至所述第二插入孔中间处与所述定位架相互连接,所述上甄下料叶片安装在所述定位架底部中间处。
12.优选的,所述料盘酒甄组件包括甄锅、料位传感器、布料机构、连接定位杆、下料口和酒甄,所述甄锅安装在所述定位架底部处,所述料位传感器等间距安装在所述甄锅内壁处,所述布料机构安装在所述甄锅内底部中间处,所述连接定位杆安装在所述甄锅外壁两侧处,所述下料口开设在所述甄锅和所述布料机构中间处,所述酒甄安装在所述甄锅底部处。
13.本实用新型的有益效果为:
14.本实用新型提供的一种智能喂料上甄一体机器人:本一体机沿着轨道做直线反复进行运动,通过电器控制可实现设备进向精准的定位,本一体机固定在底座上,沿着底座中心可90
°
进旋转的,上甄时转到与轨道90
°
方向,上甄完成后,转到轨道方向,移动到下一个酒甄或者移动到停机位,喂料斗采用行车抱斗进行上料,当一体机进入上甄的状态,装料抱斗将酒糟装入喂料斗,上甄喂料输送机输送酒糟至甄锅,料盘内设置有料位传感器,当物料到达一定料厚触发料位传感器,当物料的厚度达标后上甄喂料机停止进行送料,进行启动带动下料叶片将物料均匀的铺至甄锅内,当料盘物料下完后停止下料,完成一侧物料进行上料,第一层物料处理好后进行重复一层铺料动作,重复上料次数达到设定值后即完成单甄甄锅上料任务,通过一体机沿着底座中心旋转90
°
,转到轨道的方向,移动到下一个酒甄 26或者移动到停机位处,等待下一轮上料任务。
附图说明
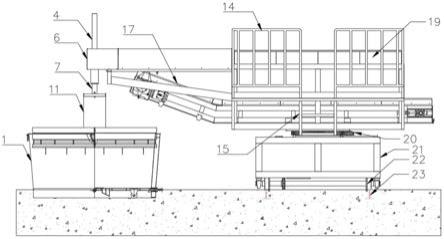
15.图1为喂料上甄一体机器人的主视图;
16.图2为喂料上甄一体机器人的装料抱斗结构图;
17.图3为喂料上甄一体机器人的侧视图;
18.图4为喂料上甄一体机器人的俯视图;
19.图5为喂料上甄一体机器人的立体图。
20.图中:1
‑
甄锅,2
‑
上甄下料叶片,3
‑
料位传感器,4
‑
甄锅提升导向杆,5
‑
布料机构,6
‑
封盖,7
‑
导向轴承总成,8
‑
第一插入孔,9
‑ꢀ
连接定位杆,10
‑
第二插入孔,11
‑
定位架,12
‑
下料口,14
‑
操作平台, 15
‑
梯子,16
‑
装料抱斗,17
‑
上甄喂料机,19
‑
喂料斗,20
‑
旋转支撑, 21
‑
底座,22
‑
行走轮,23
‑
轨道,24
‑
抱斗连接件,26
‑
酒甄。
具体实施方式
21.为使本技术领域人员更加清楚和明确本实用新型的技术方案,下面结合实施例及附图对本实用新型作进一步详细的描述,但本实用新型的实施方式不限于此。
22.如图1
‑
图5所示,本实施例提供了一种智能喂料上甄一体机器人,包括装料抱斗16、喂料斗19和抱斗连接件24,装料抱斗16顶部中间处安装有抱斗连接件24,喂料斗19上设有操作组件,喂料斗19底部一侧设有喂料密封组件,喂料斗19底部一侧中间处安装有支撑底座行走组件,喂料密封组件底部车设有导杆插孔定位组件,导杆插孔定位组件底部处设
有料盘酒甄组件。
23.在本实施例中,如图1
‑
图5所示,操作组件包括操作平台14和梯子15,操作平台14安装在喂料斗19一侧处,梯子15安装在喂料斗19一侧中间处。
24.通过安装在喂料斗19一侧的操作平台14和梯子15进行操作。
25.在本实施例中,如图1
‑
图5所示,喂料密封组件包括上甄喂料机17和封盖6,封盖6安装在喂料斗19一侧处,上甄喂料机17设在喂料斗19底部处。
26.通过上甄喂料机17进行上甄,通过封盖6进行密封。
27.在本实施例中,如图1
‑
图5所示,支撑底座行走组件包括旋转支撑20、底座21、行走轮22和轨道23,旋转支撑20安装在上甄喂料机17底部一端处,底座21安装在旋转支撑20底部处,行走轮22 安装在底座21底部处,轨道23设在底座21底部两侧处。
28.通过旋转支撑20带动上甄喂料机17和喂料斗19进行旋转,通过行走轮22沿着轨道23进行移动上料。
29.在本实施例中,如图1
‑
图5所示,导杆插孔定位组件包括上甄下料叶片2、甄锅提升导向杆4、导向轴承总成7、第一插孔8、第二插入孔10和定位架11,第一插孔8开设在封盖6两侧中间处,甄锅提升导向杆4插入至第一插孔8中间处,定位架11设在封盖6底部处,第二插入孔10开设在定位架11中间两侧处,导向轴承总成7设在甄锅提升导向杆4底部中间处,且导向轴承总成7插入至第二插入孔10中间处与定位架11相互连接,上甄下料叶片2安装在定位架 11底部中间处。
30.通过甄锅提升导向杆4插入第一插孔8内,通过甄锅提升导向杆 4和第二插入孔10内的导向轴承总成7进行提升。
31.在本实施例中,如图1
‑
图5所示,料盘酒甄组件包括甄锅1、料位传感器3、布料机构5、连接定位杆9、下料口12和酒甄26,甄锅 1安装在定位架11底部处,料位传感器3等间距安装在甄锅1内壁处,布料机构5安装在甄锅1内底部中间处,连接定位杆9安装在甄锅1外壁两侧处,下料口12开设在甄锅1和布料机构5中间处,酒甄26安装在甄锅1底部处。
32.通过甄锅1内的料位传感器3的厚度进行传感,通过定位架11 底部的布料机构5进行布料。
33.如图1
‑
图5所示,本实施例提供了一种智能喂料上甄一体机器人的工作过程如下:
34.步骤1:本一体机沿着轨道23做直线反复进行运动,通过电器控制可实现设备进向精准的定位,本一体机固定在底座21上,沿着底座21中心可90
°
进旋转的,上甄时转到与轨道2390
°
方向,上甄完成后,转到轨道方向,移动到下一个酒甄26或者移动到停机位,喂料斗采用行车抱斗进行上料;
35.步骤2:当一体机进入上甄的状态,装料抱斗16将酒糟装入喂料斗19,上甄喂料输送机输送酒糟至甄锅1,料盘内设置有料位传感器3,当物料到达一定料厚触发料位传感器3,当物料的厚度达标后上甄喂料机17停止进行送料,11进行启动带动下料叶片将物料均匀的铺至甄锅1内。
36.步骤3:当料盘物料下完后停止下料,完成一侧物料进行上料,第一层物料处理好后进行重复一层铺料动作,重复上料次数达到设定值后即完成单甄甄锅1上料任务,通过一体机沿着底座中心旋转 90
°
,转到轨道23的方向,移动到下一个酒甄26或者移动到停机位处,等待下一轮上料任务。
37.以上所述,仅为本实用新型进一步的实施例,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型所公开的范围内,根据本实用新型的技术方案及其构思加以等同替换或改变,都属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。