1.本实用新型属于物流搬运技术领域,尤其是涉及一种基于视觉识别的物流搬运车。
背景技术:
2.在物流、仓储不断发展,智能化、数字化工厂不断推进的今天,旧式的人工搬运以及叉车拖车一类的大型车辆面对层出不穷的新型物流搬运需求逐渐显得费事费力且无法在逐渐复杂的工厂、仓储环境下灵活运动。尤其考虑到日渐高昂的人工成本和不利于大中型搬运车展开的物流仓库、工厂等环境。作为物流运输和工厂数字化生产的重要一环,物流搬运这一要素的完备对两者的效率提升有着至关重要的意义。
3.而由于视觉识别的低成本性、多任务性、高灵活性,使得视觉识别在物流搬运领域有很强的发展潜力。通过视觉识别,不仅可以简单地读取qr码上的信息,也可以通过录入不同的识别算法来拓展任务类型。同时仓库、工厂等室内空间光照恒定,采用视觉识别不会受到自然光干扰,可靠性更高。且采用视觉识别所需要的硬件设备属于非接触式,能够大大减小检测环节因机械损伤或老化而引发的事故。当下,由于全国物流网络的快速膨胀和工厂数字化生产的大力推行,一款具有上述优势的物流搬运车的应用前景显而易见得广阔。
技术实现要素:
4.为了克服现有技术存在的缺陷,本实用新型提供了一种性价比高、灵活性强、能够胜任多种任务的基于视觉识别的物流搬运车。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种基于视觉识别的物流搬运车,包括搬运车主体、物流搬运机械臂、视觉识别系统和控制系统,所述搬运车主体包括车底盘和四个车轮,所述车轮采用麦克劳姆轮,每个车轮通过一个车轮电机驱动,所述车轮电机采用编码器电机,所述车底盘的后部上设有载货台,所述控制系统设置在载货台的下方,所述物流搬运机械臂通过旋转云台可转动的安装在车底盘的前部上;
7.所述车底盘的底部后侧和右侧上分别设有一个八路灰度传感器,车底盘的底部左侧上设有两个电机驱动;
8.所述物流搬运机械臂包括搬运爪、第一舵机、第二舵机、第三舵机和第四舵机,第四舵机通过第四舵机支架安装在旋转云台上,第五支架与第四舵机的舵盘连接,第三支架通过第四支架与第五支架连接,并且第三支架安装在第三舵机的舵盘上,第三舵机通过第三舵机支架安装在第三支架上,第二支架安装在第二舵机的舵盘上同时与第三舵机支架连接,第二舵机通过第二舵机支架安装在第二支架上,同时与第一支架的右端连接,第一支架的左端安装在第一舵机的舵盘上,第一舵机通过第一舵机支架安装在第一支架上,所述搬运爪安装在第一舵机的舵盘上;所述视觉识别系统包括工业摄像头,所述工业摄像头安装在第一舵机上;
9.所述控制系统包括单片机和工控机,所述八路灰度传感器与单片机连接,单片机与工控机连接,所述工业摄像头与工控机连接,单片机通过电机驱动分别与车轮电机、旋转云台的电机连接,同时,单片机分别与第一舵机、第二舵机、第三舵机和第四舵机连接。
10.本实用新型的有益效果主要表现在:性价比高、灵活性强、能够胜任多种任务。
附图说明
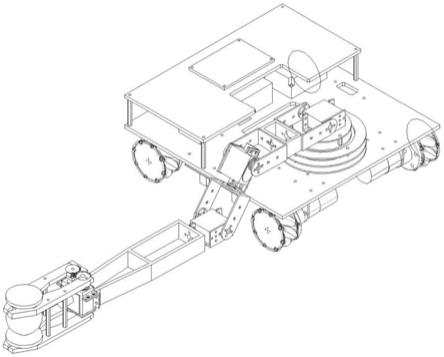
11.图1为本实用新型的整体结构示意图。
12.图2是本实用新型的仰视图。
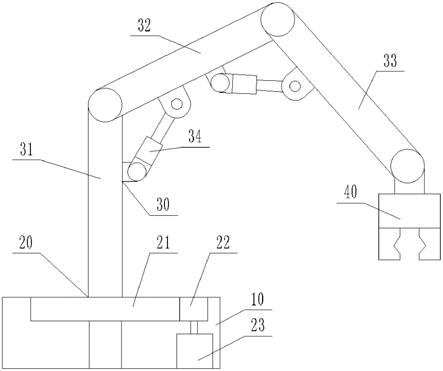
13.图3为本实用新型的侧视图。
14.图4为本实用新型的俯视图。
具体实施方式
15.下面结合附图对本实用新型作进一步描述。
16.参照图1~图4,一种基于视觉识别的物流搬运车,包括搬运车主体、物流搬运机械臂、视觉识别系统和控制系统,所述搬运车主体包括车底盘8和四个车轮,所述车轮采用麦克劳姆轮,每个车轮通过一个车轮电机驱动,所述车轮电机采用编码器电机,所述车底盘8的后部上设有载货台6,所述控制系统设置在载货台6的下方并且安装于车体底盘8上,所述物流搬运机械臂通过旋转云台可转动的安装在车底盘8的前部上;所述视觉识别系统包含的工业摄像头ca安装在物流搬运机械臂上,可带动工业摄像头ca在机械臂运动范围内自由运动;
17.所述车底盘8由一块铝板构成,其上固定由另一块铝板制作的载货台6;载货台6上下方分别是单片机9和工控机7;车底盘8前方固定着一自由度旋转云台5;车体底盘8下方固定着四个电机支架12、13、14、15,电机支架上方分别固定着四个编码器电机16、17、18、19,编码器电机上各自分别安装有四个麦克劳姆轮l1、l2、l3、l4;同时车底盘8的底部后侧和右侧上分别固定着八路灰度传感器11、10,车底盘8的底部左侧上固定有两个电机驱动27、28。所述编码器电机通过精确控制四个麦克劳姆轮的不同转向、转速来实现全向运动。同时依据车底盘8下方两个八路灰度传感器所返回的数据来调整自身姿态与运动。一自由度旋转云台5通过内部电机运动到达指定角度,使得物流搬运机械臂能够运动到空间范围内任意位置。
18.物流搬运机械臂由舵机支架20固定于一自由度旋转云台5上;所述物流搬运机械臂由搬运爪1、第一舵机支架26、第一支架2、第二舵机支架25、第二支架24、第三舵机支架23、第三支架4、第四支架22、第五支架21、第四舵机支架20、第一舵机m1、第二舵机m2、第三舵机m3、第四舵机m4组成;如图3所示,第四舵机m4安装于第四舵机支架20上,第四舵机支架20安装在旋转云台上,第五支架21与第四舵机m4的舵盘连接,第三支架4通过第四支架22与第五支架21连接,并且第三支架4安装在第三舵机m3的舵盘上,第三舵机m3通过第三舵机支架23安装在第三支架4上,第二支架24安装在第二舵机m2的舵盘上同时与第三舵机支架23连接,第二舵机m2通过第二舵机支架25安装在第二支架24上,同时与第一支架2的右端连接,第一支架2的左端安装在第一舵机m1的舵盘上,第一舵机m1通过第一舵机支架26安装在第一支架2上,所述搬运爪1安装在第一舵机m1的舵盘上;所述视觉识别系统包括工业摄像
头ca,所述工业摄像头ca安装在第一舵机m1上。物流搬运机械臂上的三组高扭矩舵机通过转动到不同角度,使得机械臂末端的搬运爪能够指向机械臂运动空间范围内的大多朝向。
19.所述控制系统包括单片机9和工控机7,所述八路灰度传感器与单片机连接,单片机9与工控机7连接,所述工业摄像头ca与工控机7连接,单片机9通过电机驱动分别与车轮电机、旋转云台的电机连接,同时,单片机9分别与第一舵机m1、第二舵机m2、第三舵机m3和第四舵机m4连接。
20.本物流搬运车所采用的构件均为套件或板件,有利于本实用新型之后的规模生产及成本控制。所述编码器电机、麦克劳姆轮与灰度传感器的共同使用在控制成本的基础上尽可能大地保障了整车的运动稳定性。物流搬运机械臂与搬运爪的模块化设计使得搬运爪能够依据不同任务类型进行更换,使得任务适应性提升。将用于视觉识别的工业摄像头设置于搬运爪与机械臂的连接处,保证了识别视角的灵活性,所述设计允许工业摄像头改变与被识别物块间的距离,一定程度上可通过调整识别姿态来提升视觉识别的可靠程度。
21.本实用新型的工作原理为:运动部分通过麦克劳姆轮与灰度传感器的共同使用来进行全向移动以及巡线纠偏;识别与抓取部分通过工业摄像头与机械臂的联动调节,将工业摄像头拍摄到的图像信息经过工控机处理发送至单片机,单片机直接操控舵机运动并将偏差信息返回工控机形成闭环。识别对象信息完毕后使用搬运爪将对象抓起,针对不同任务类型转移到载货台的不同储存区域中。再依据任务指示的不同,通过各个功能的组合完成后续任务。
22.本实用新型的功能实现流程为:所述物流搬运车通过麦克劳姆轮和灰度传感器沿一定轨迹快速运动至目标点。到达指定点位后,单片机9将信号传送给工控机7,工控机7依据当前任务类型选择视觉识别的相关工作程序,并将指定的机械臂运动方式发送给单片机9,单片机9直接操控舵机调整机械臂姿态,并实时反馈数据给工控机7,直到工控机7完成视觉识别并将目标信息与任务类型比照后得出的处理措施发送给单片机9,单片机9依据指令执行。
23.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。