1.本发明属于等离子体控制技术,具体涉及一种托卡马克边缘局域模实时识别算法。
背景技术:
2.现有技术中实现对托卡马克等离子体边缘局域模幅值和频率一定程度的控制一般为施加共振磁扰动(resonant magnetic perturbation,简称rmp)的方法,实验人员操控磁扰动,令边缘输运垒在预期的时间节点上提前崩塌,从而增大边缘局域模频率,降低其幅值和对托卡马克装置的影响。但这些手段目前均缺乏可靠的触发方式,通常在托卡马克放电实验中,这些控制手段会在辅助加热投入期间全程开启,从而不论边缘局域模是否出现,均进行无差别的介入控制。考虑到rmp等控制手段本质上都是在对等离子体施加外部干扰,在没有边缘局域模出现时就加入是会对等离子体控制效果、物理参数产生负面影响的,因此这种无差别投入的方式存在很大的问题。
技术实现要素:
3.本发明的目的是提供一种基于深度神经网络的托卡马克边缘局域模实时识别算法,可以避免无差别介入对放电实验效果产生的不良影响。
4.本发明的技术方案如下:
5.基于深度神经网络的托卡马克边缘局域模实时识别算法,包括如下步骤:
6.步骤一、训练数据集准备;
7.获取托卡马克装置历史放电中偏滤器氘α线辐射强度信号;
8.采集多次历史放电中的时间序列数据,形成训练数据集;
9.步骤二、神经网络模型创建及预测计算;
10.神经网络模型的层序列包括一维卷积层和全连接层;
11.利用神经网络分析偏滤器氘α线辐射功率值;
12.步骤三、模型参数训练;
13.3.1根据每个神经网络层的输入和输出矩阵规模,利用glorot初始化法给定参数矩阵的初始化值;
14.3.2随机抓取训练数据集中的时间序列数据,随机截取时间长度一端,构成一个训练批次的数据,每个批次的数据包含了1个输入矩阵x、输出标签l;其中x来自于对历史数据库的采集,l由该数据来源的放电实验是否发生了破裂决定,如果数据来源的实验发生了破裂,l取值为1,否则为
‑
1;
15.3.3将一个训练批次的数据输入神经网络模型进行计算,神经网络对每个x的值得出计算结果y,将y与标签l求hinge loss,则会得到本批次的预测损失,如下式所示,
16.loss=max(1,1
‑
y*l)
17.3.4更新神经网络模型的权重参数w
*
和b
*
[0018][0019]
其中η代表梯度下降法的步长,用于确定最小化预测损失,loss为前一步骤计算的预测损失;
[0020]
b
*
的计算方法与w完全相同,将公式中的w替换为b即可;
[0021]
步骤3.5反复执行3.2
‑
3.4步骤,直到损失函数不再下降,或者整个训练集的数据都被抓取过20次以上,则停止训练;
[0022]
步骤四、推理阶段实时化部署
[0023]
神经网络模型训练完成后,将参数输入神经网络模型进行计算,便可以获得实时的边缘局域模识别结果。
[0024]
步骤一中,信号采样频率为10khz,即每毫秒有10个浮点数数据,数据取值介于0到5之间。
[0025]
所述的采集多次历史放电中的时间序列数据,采集的时间区间从每一次放电零时刻开始,到等离子体电流降低到50ka以下放电结束为止;获得多个时间序列数据,每个时间序列数据的长度为0ms
‑
3000ms,每毫秒为一个时间节点,对应10个浮点数数值。
[0026]
对所有时间序列数据,截取时间窗,生成了若干个数据切片,形成训练数据集。
[0027]
所述步骤二具体包括:
[0028]
步骤2.1输入数据的100长度信号片段通过卷积核数量为16,卷积核宽度为50的一维卷积层,得到卷积后的输出;
[0029]
步骤2.2前一步骤的输出通过卷积核数量为16,卷积核宽度为50的一维卷积层,得到卷积后的输出;
[0030]
步骤2.3前一步骤的输出通过卷积核数量为12,卷积核宽度为50的一维卷积层,得到卷积后的输出;
[0031]
步骤2.4前一步骤的输出通过卷积核数量为8,卷积核宽度为50的一维卷积层,得到卷积后的输出;
[0032]
步骤2.5前一步骤的输出通过神经元数量为25的全连接层得到输出;
[0033]
步骤2.6前一步骤的输出通过神经元数量为25的全连接层得到输出;
[0034]
步骤2.7前一步骤的输出通过神经元数量为1的全连接层得到输出。
[0035]
一维卷积层用于提取一维数据的局部特征,公式如下,
[0036][0037]
其中,x为前一神经网络层的输出,为i*j的二维矩阵,i为模型输入数据的宽度,j为输入的通道数;x(i n,j)表示x矩阵中坐标为(i n,j)的值,i取值范围为[0,i);n的取值范围为[0,n);
[0038]
w为卷积层的权重矩阵,为m*n*j的三维浮点数矩阵,其中m表示卷积核的个数,n表示卷积核的宽度;
[0039]
y为一维卷积层的输出数据,为i*m的浮点数矩阵,y(i,m)表示y矩阵中坐标为(i,m)的值,i取值范围是[0,i),而m取值范围为[0,m);
[0040]
b为卷积层的偏置矩阵,为m的一维浮点数矩阵,b(m)表示矩阵中坐标为(m)的值。
[0041]
全连接层的作用是综合输入数值的全局特征,分析并计算最终输出,公式如下;
[0042][0043]
其中,x为前一神经网络层的输出,为i*j的二维矩阵,i为模型输入数据的宽度,j为输入的通道数,w为卷积层的权重矩阵,为m*n*j的三维浮点数矩阵,其中m表示卷积核的个数,n表示卷积核的宽度;b为卷积层的偏置矩阵,为m的一维浮点数矩阵;y为一维卷积层的输出数据,为i*m的浮点数矩阵;
[0044]
x(i)表示x矩阵中坐标为(i)的值,w(i,j)表示w矩阵中坐标为(i,j)的值,其中i,j的取值范围分别是是[0,i),[0,j);b(j)表示矩阵中坐标为(j)的值;y(j)表示y矩阵中坐标为(j)的值。
[0045]
在步骤四中,在托卡马克控制系统中设置一个阈值,当所述的边缘局域模识别结果超过这一阈值,便发送触发脉冲给smbi系统,来降低边缘局域模爆发的程度。
[0046]
阈值的取值位于[
‑
1,1]区间。
[0047]
步骤一中采集多次历史放电的采集次数为1320次,得到1320个时间序列数据。
[0048]
步骤一中,对于所有时间序列数据,按照长度为10ms,步长为1ms的时间窗截取,获得长度为100的信号片段,所有时间序列数据截取后,共计生成了241900个数据切片,形成了训练数据集。
[0049]
本发明的显著效果如下:本方法能够填补边缘局域模控制技术中触发信号这一环节的空白。在识别出等离子体内部确实出现了边缘局域模后,再触发控制系统对其频率和幅值介入控制,则可以避免无差别介入对放电实验效果产生的不良影响。通过使用本方法实时识别边缘局域模的出现时间,在出现后再通过反馈控制的方式投入控制手段,比起无差别投入控制的方式,可以有效减少控制方法对等离子体本身的干扰。
附图说明
[0050]
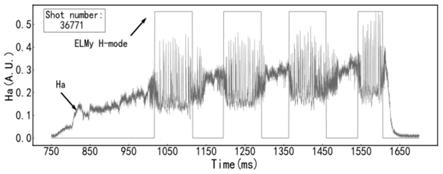
图1为实施例中实验放电期间的测试效果。
具体实施方式
[0051]
下面通过附图及具体实施方式对本发明作进一步说明。
[0052]
步骤一、训练数据集准备
[0053]
步骤1.1从托卡马克历史数据库中获取历史放电中偏滤器氘α线辐射强度信号,信号采样频率为10khz,即每毫秒有10个浮点数数据,数据取值介于0到5之间。
[0054]
步骤1.2采集托卡马克共计1320次历史放电的数据,从中采集前一步骤中提到的偏滤器氘α线辐射强度信号通道的数值,采集的时间区间从每一次放电零时刻开始,到等离子体电流降低到50ka以下放电结束为止,从而获得1320个时间序列数据,每个时间序列数据的长度为0ms
‑
3000ms,每毫秒为一个时间节点,对应前一步骤提到的10个浮点数数值。
[0055]
步骤1.3对所有时间序列数据,按照长度为10ms,步长为1ms的时间窗截取,获得长度为100的信号片段,所有时间序列数据截取后,共计生成了241900个数据切片,形成了训
练数据集。
[0056]
步骤二、神经网络模型创建
[0057]
由一维卷积层和全连接层两种组件构成神经网络;
[0058]
一维卷积层:这一组件用于提取一维数据的局部特征,公式如下。
[0059][0060]
x是组件的输入数据,通常是前一神经网络层的输出,一个浮点数构成、尺寸为i*j的二维矩阵。i表示输入的宽度,通常在神经网络模型的第一层,i即为模型输入数据的宽度,在后续各层中则等于前一层神经网络输出的宽度。j表示输入的通道数,在第一层等于1,在后续各层等于前一层神经网络的卷积核数量及神经元数量。x(i n,j)表示x矩阵中坐标为(i n,j)的值,i取值范围为[0,i),所以i n的值可能会超过矩阵宽度i,当超过时则用第i
‑
1位的值代替。j取值范围为[0,j)。
[0061]
w和b是神经网络层内部的待定参数。w为卷积层的权重矩阵,是一个尺寸为m*n*j的三维浮点数矩阵,其中m表示卷积核的个数,n表示卷积核的宽度,j与输入数据x的通道数一致,
[0062]
y为一维卷积层的输出数据,是一个尺寸为i*m的浮点数矩阵,可以看出输出数据的尺寸会由输入数据x的尺寸及神经网络层参数唯一确定,y(i,m)表示y矩阵中坐标为(i,m)的值,i取值范围是[0,i),而m取值范围为[0,m)。
[0063]
w(m,n,j)表示w矩阵中坐标为(m,n,j)的值;其中m,n,j的取值范围分别是是[0,m),[0,n),[0,j);
[0064]
b为卷积层的偏置矩阵,是一个尺寸为m的一维浮点数矩阵,b(m)表示矩阵中坐标为(m)的值,m的取值范围为[0,m),目前两个矩阵只有明确的矩阵大小但没有确定的数值,其数值需要通过随机初始化后进行梯度下降法优化来确定,计算方法会在步骤三中给出;
[0065]
m表示卷积核的个数,n表示卷积核的宽度,为人工设计的神经网络层参数。
[0066]
当以上参数全部确认后,本层神经网络的输出矩阵尺寸便也确定,为i*m,第一个维度与输入x的宽度一致,第二个维度与卷积核数量一致。
[0067]
后续创建模型时会反复调用本组件,每次调用时都会用到不同的m,n,i,j值,w、b的取值则在步骤三通过梯度下降法确定,所以在这里只给出符号定义,而不给出具体取值。
[0068]
上面所有的m,n,i,j,请替换成公式里确定出现的字符表示,不要出现其他形式。
[0069]
以下几个功能组成全部是这方面的问题,请一并修改公式解释说明,尤其注意字母表示的部分;
[0070]
全连接层:这一组件的功能是综合输入数值的全局特征,分析并计算最终输出。公式如下。
[0071][0072]
公式中x是组件的输入数据,通常是前一神经网络层的输出,一个浮点数构成、尺寸为i的一维矩阵。i表示输入的宽度,通常在神经网络模型的第一层,i即为模型输入数据的宽度,在后续各层中则等于前一层神经网络输出的宽度。x(i)表示x矩阵中坐标为(i)的
值,i取值范围为[0,i)。
[0073]
w和b是神经网络层内部的待定参数。w为卷积层的权重矩阵,是一个尺寸为i*j的二维浮点数矩阵,其中i即为输入数据的宽度,j表示本层神经元的数量,为人工设计的神经网络层参数。w(i,j)表示w矩阵中坐标为(i,j)的值,其中i,j的取值范围分别是是[0,i),[0,j)。b是全连接层的偏置矩阵,是一个尺寸为j的一维浮点数矩阵,b(j)表示矩阵中坐标为(j)的值,j的取值范围为[0,j),目前两个矩阵只有明确的矩阵大小但没有确定的数值,其数值需要通过随机初始化后进行梯度下降法优化来确定,计算方法会在步骤三中给出。
[0074]
y为一维卷积层的输出数据,是一个尺寸为j的浮点数矩阵,可以看出输出数据的尺寸会由神经网络层的神经元数量唯一确定。y(j)表示y矩阵中坐标为(j)的值,j取值范围是[0,j)。
[0075]
后续创建模型时会反复调用本组件,每次调用时都会用到不同的j值,w、b的取值则在步骤三通过梯度下降法确定,所以在这里只给出符号定义,而不给出具体取值。
[0076]
利用神经网络分析偏滤器氘α线辐射功率值,判断当前时间的放电是否出现了边缘局域模,具体步骤如下:
[0077]
步骤2.1输入数据的100长度信号片段通过卷积核数量为16,卷积核宽度为50的一维卷积层,得到卷积后的输出;
[0078]
步骤2.2前一步骤的输出通过卷积核数量为16,卷积核宽度为50的一维卷积层,得到卷积后的输出;
[0079]
步骤2.3前一步骤的输出通过卷积核数量为12,卷积核宽度为50的一维卷积层,得到卷积后的输出;
[0080]
步骤2.4前一步骤的输出通过卷积核数量为8,卷积核宽度为50的一维卷积层,得到卷积后的输出;
[0081]
步骤2.5前一步骤的输出通过神经元数量为25的全连接层得到输出;
[0082]
步骤2.6前一步骤的输出通过神经元数量为25的全连接层得到输出;
[0083]
步骤2.7前一步骤的输出通过神经元数量为1的全连接层得到输出;
[0084]
步骤三、模型参数训练
[0085]
通过在训练数据集上的计算确定w、b参数矩阵的具体值,具体的执行步骤如下
[0086]
步骤3.1根据每个神经网络层的输入和输出矩阵规模,利用glorot初始化法给定参数矩阵的初始化值。即如果神经网络层的输入是共计m个数字,输出是共计n个数字,则本层所有参数矩阵的数值通过一个均值为0,方差为2/(m n)的正态分布随机数给定。
[0087]
步骤3.2随机抓取训练数据集中的128个时间序列数据,构成一个训练批次的数据,每个批次的数据包含了1个128*200的输入矩阵x,128*1的输出标签l.
[0088]
其中x来自于对历史数据库的采集,l由该数据对应的实验期间是否出现了边缘局域模决定,如果出现了则l取值为1,否则为
‑
1。
[0089]
步骤3.3将一个训练批次的数据输入神经网络模型进行计算,神经网络对每个x的值,会给出一个计算结果y,将y与标签l求hinge loss(合页损失函数),则会得到本批次的预测损失,如下式所示。
[0090]
loss=max(1,1
‑
y*l)
[0091]
公式中max表示对括号内的两个数字求最大值,剩余符号与前一步中介绍的一致。
[0092]
步骤3.4采用梯度下降法来最小化预测损失,更新神经网络模型的权重参数,即用更新的参数w
*
和b
*
替代原本的w、b;
[0093]
w
*
的计算方式如下,其中η代表梯度下降法的步长,loss为前一步骤计算的预测损失。
[0094][0095]
b
*
的计算方法与w完全相同,将公式中的w替换为b即可;
[0096]
步骤3.5反复执行3.2
‑
3.4步骤,直到损失函数不再下降,或者整个训练集的数据都被抓取过20次以上,则停止训练,此时更新的权重参数w
*
,b
*
即为最终确定的参数。
[0097]
步骤四、推理阶段实时化部署
[0098]
在边缘局域模识别算法的神经网络模型训练完成后,在托卡马克控制系统中实时获取输入信号列表对应的数值,由于信号采样频率为10khz,每毫秒获得的数据即长度10的浮点数向量,将其与前9个毫秒的输入数据拼接,形成长度100的浮点数向量后,输入神经网络模型进行计算,便可以获得实时的边缘局域模识别结果,这一数值位于
‑
1到1的区间内,越接近1代表边缘局域模出现的可能性越大。
[0099]
在托卡马克控制系统中设置一个阈值,当边缘局域模识别算法的输出超过这一阈值便发送触发脉冲给smbi(超声分子束注入)系统,通过提前触发并释放造成边缘局域模不稳定性的自由能,来降低边缘局域模爆发的程度,最终达到预期的边缘局域模实时控制效果。这一阈值的取值位于[
‑
1,1]区间。
[0100]
如图1所示,本方法应用于中国环流器2号a托卡马克装置shot36771实验放电期间的测试效果。其中ha代表托卡马克偏滤器中测得的氘α线辐射强度,elmy h
‑
mode代表模型计算出的该时间段是否处于伴随边缘局域模的h模放电状态的结果(边缘局域模只会与h模同时出现),1表示出现了边缘局域模,0表示没有。
[0101]
本次放电中反复出现了多次边缘局域模,图中显示算法识别出的边缘局域模出现区间,与实验现象很好的符合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。