1.本发明涉及一种手指运动导轨,用于执行患者手指和/或拇指的连续、被动和/或主动辅助运动,包括:一种装置,沿各自手指和/或拇指横向布置,用于掌指关节的弯曲;一种机构,其沿各自手指和/或拇指侧向布置,用于近端指间关节和/或远端指间关节的弯曲,该机构具有用于将该机构连接到掌指关节弯曲装置的第一连接杆和至少一个枢轴杆,可操作地连接至第一连接杆,用于与近端指间关节和/或远端指间关节相互作用。
2.本发明还涉及一种用于对患者的手指和/或拇指进行连续、被动和/或主动辅助运动的治疗装置,包括:一个或多个此类手指运动导轨。
背景技术:
3.对于连续、被动和/或主动辅助的关节活动,特别是在手部区域的手术后的活动,从现有技术中已知允许单个和/或多个手指自动运动的多个手指运动导轨或治疗装置。
4.例如,us 5 697 892 a公开了一种用于手的连续被动运动的装置,利用该装置可以进行手指的弯曲和伸展运动。上述方法的一个缺点是,手指的运动受到手指上的机械运动运动学的限制。此外,手指不能单独治疗,也不能相互独立。
5.为了避免这种情况,ep 2 549 971 b1公开了一种手部康复装置,该装置的特点是,根据完全的弯曲运动或物体抓握和/或通过练习模拟日常活动,用于被动和主动辅助同时和/或选择性地弯曲/伸展五指,用户可自由设置的运动顺序和/或组合,以及手指弯曲/伸展期间用于滑动和支撑柔性杆的元件。然而,在这里,杆也被不利地直接布置在手指上方,并且可能限制移动自由。
6.jp 2011 115 248 a和us 2014/028 86 64 a1公开了用于支持手指运动的装置,其运动机构沿着各自的手指横向布置,从而避免了因停留在手指上而导致的运动限制。jp 2011 115 248 a公开了一种用于支撑运动的装置,尤其是手指运动导轨,其旨在能够以自然弯曲姿势放置三关节区域。相比之下,us 2014/0288664 a1公开了一种手指运动支撑装置,该装置使用传感器技术来确定用户关于所需手指运动(“弯曲或伸展”)的意图,然后借助布置在每个指骨上的压电驱动器来支撑该运动。
7.然而,由于其设计原理,这两种装置只能不充分地适应不同患者手指或拇指的不同解剖形状,因此,它们执行的手指自动运动可能在相对较大的程度上偏离自然运动。
8.为了改善这一点,de 11 2017 000 012 b4公开了一种用于对患者的手指和拇指进行连续、被动和/或主动辅助运动的治疗装置,该治疗装置允许每个选定的手指配备其自身的手指运动导轨,该运动导轨具有运动运动学,布置在待治疗手指的一侧,允许后者进行不受阻碍的弯曲和/或伸展运动。已知的手指运动轨迹基于托架/导轨运动运动学,该运动学允许自动手指运动,该运动非常接近解剖学上自然的手指运动。然而,此处托架仅可在导轨中滑动引导,因此在某些情况下,托架容易受到扭转或轴向力的作用,即作用在装置纵轴
上的力,这反过来会对自动手指移动产生负面影响。
9.在此背景下,us 2018/018 52 31 a1公开了一种便携式手指康复装置,其包括拇指机构、用于食指、中指和无名指的三个手指机构以及用于小指的运动机构,并且可以设置在用户的手背上。在这种情况下,单个运动机构的运动通过一种多关节铰链来实现,该铰链又通过伸缩驱动装置来移动。伸缩驱动器通过枢轴点直接以枢轴方式连接到多关节铰链,并在操作过程中随铰链一起移动,因此驱动器的供电电缆(如电源)不断受到机械作用,这可能会导致磨损,例如电缆断裂。
技术实现要素:
10.因此,本发明的目的是提供一种相对于现有技术改进的手指运动导轨,以及一种改进的治疗装置,用于执行患者手指和/或拇指的连续、被动和/或主动辅助运动,其允许解剖学上的自然运动,手指无阻碍自动移动,同时在外力作用下经久耐用。
11.手指运动导轨或治疗装置旨在更坚固地抵抗轴向力和扭转力的作用,特别是与de 11 2017 000 012 b4中公开的治疗装置以及本技术明确提及的运动原理相比。
12.就手指运动导轨而言,该目的通过权利要求1的特征实现,就治疗装置而言,通过权利要求13的特征实现。可以单独使用或彼此组合使用的有利实施例和发展是从属权利要求的主题。
13.根据本发明的手指运动导轨与所述类型的手指运动导轨的区别在于,用于掌指关节弯曲的装置设计为多关节铰链,除了通过第一连接杆的连接之外,通过至少一个第二连接杆和至少一个连接关节,可操作地连接到用于近端指间关节和/或远端指间关节弯曲的机构。
14.根据本发明的治疗装置的相应特征在于,其包括用于将治疗装置连接到患者手部的支架,其中支架具有上部结构,根据本发明的一个或多个手指运动导轨连接到每个选定手指,以及至少一个用于电动驱动一个或多个这样的手指运动导轨的运动驱动器,以及至少一个控制装置,该控制装置与根据本发明的一个或多个手指运动导轨控制连接。
15.与现有技术相比,根据本发明的治疗装置或根据本发明的手指运动导轨具有设计为多关节铰链的装置,对于掌指关节的弯曲,其明显更能抵抗沿手指运动导轨纵轴作用的压缩力和拉力的作用,以及相对于手指运动导轨纵轴的旋转力或扭转力的作用。这有利地允许更精确且更无干扰地执行解剖学上自然(椭圆形)的自动手指运动,这有利地增加治疗的成功率。此外,相对于现有技术,该装置的使用寿命有利地增加。
附图说明
16.下面参考优选示例性实施例并结合附图描述本发明的附加细节和进一步优点。
17.在示意图中:
18.图1示出了治疗装置的基本结构的平面图,作为示例,该治疗装置在支架上具有五个手指运动导轨;
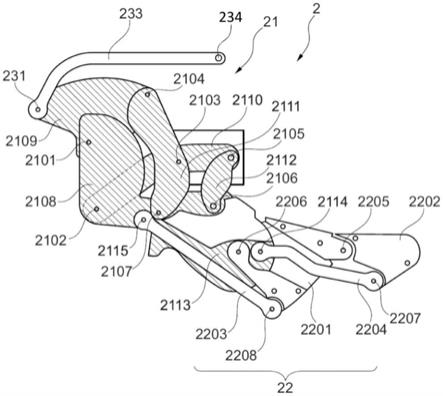
19.图2示出了根据本发明的手指运动导轨在延伸位置的实施例的侧视图;
20.图3示出了根据本发明的手指运动导轨在弯曲位置的另一实施例的侧视图;和
21.图4示出了在另一实施例中具有多个手指运动导轨和运动驱动器的治疗装置的另
一实施例的侧视图。
具体实施方式
22.在本发明的优选实施例的以下描述中,相同的参考符号表示相同或可比较的组件。
23.图1示出了治疗装置1的基本结构的平面图的示例,作为示例,在支架4上具有五个手指运动导轨2。
24.此处所示的治疗装置1包括用于将治疗装置1连接到患者的手3的支架4,以及一个或多个(尤其是此处所示的五个)用于患者手指和/或拇指的手指运动导轨2。支架4有利地具有上部结构40,对于每个选定的手指,一个或多个手指运动导轨2可连接到上部结构40。
25.治疗装置1还包括用于电动驱动一个或多个手指运动导轨2的至少一个运动驱动器23,以及与一个或多个手指运动导轨2控制连接的至少一个控制装置14。手指运动导轨2或其运动驱动器23与控制装置14之间的控制连接可以无线(如图所示)和/或通过电缆连接(未显示)。一个或多个运动驱动器23可以优选地设计为如图4所示的线性驱动器,尤其是每个驱动器具有导轨232,并且对于每个手指运动导轨2具有沿着导轨232运行的移动装置235。
26.用于对患者的手指和/或拇指进行连续、被动和/或主动辅助运动的手指运动导轨2包括装置21,该装置沿各自的手指和/或拇指横向布置,用于掌指关节31的弯曲,以及机构22,沿各自手指和/或拇指横向布置,用于近端指间关节32和/或远端指间关节33的弯曲,该机构具有用于将机构22连接至用于掌指关节31弯曲的装置21的第一连接杆2113和至少一个枢轴杆(或两个枢轴杆2201和2202,如图所示),操作连接至第一连接杆2113,用于与近端指间关节32和/或远端指间关节33相互作用。
27.在图2至图4中,为了清晰起见,使用阴影显示了属于用于掌指关节31弯曲的装置21的部件。
28.与各自的远端指间关节33和/或与近端指间关节32的相互作用在此可优选地通过用于紧固至第一枢轴杆2201或第二枢轴杆2202的第一可拆卸紧固件和/或承载装置26和/或用于紧固至第一枢轴杆2201或第二枢轴杆2202的第二可拆卸紧固件和/或承载装置27来实现第一连接杆2113,其中可拆卸紧固件和/或承载装置26和27用于紧固和/或承载手指,以及可拆卸紧固装置42用于将支架4紧固至前臂和/或手3,有利地设计为尺寸可调,因此可普遍用于待紧固的不同尺寸的身体部位。
29.图2和图3现在示出了根据本发明的手指运动导轨2在延伸位置(图2)和弯曲位置(图3)的实施例,每个实施例都为侧视图。图2和图3所示的实施例特别旨在说明多关节铰链作为用于掌指关节31弯曲的装置21的工作原理。
30.根据本发明,用于掌指关节31弯曲的装置21设计为多关节铰链,除了通过第一连接杆2113连接外,还通过至少一个第二连接杆2203,尤其是通过第三连接杆2204连接,以及至少一个连接接头2114、2115连接,操作连接至机构22,用于近端指间关节32和/或远端指间关节33的弯曲。装置21设计为用于掌指关节31弯曲的多关节铰链,允许围绕各自的(“虚拟”)掌指关节31移动,由此产生的移动有利地对应于解剖学上的“自然”(椭圆形)手指移动。
31.在本发明的优选实施例中,用于掌指关节31弯曲的装置21可包括,例如,七个接头2101、2102、2103、2104、2105、2106和2107,分别连接六个操纵杆2108、2109、2110、2111、2112和2113中的两个,以可旋转的方式相互连接。如果用于掌指关节31弯曲的装置21具有第一杆2108,用于与治疗装置1的支架4刚性连接,用于执行患者手指和/或手3的拇指的连续、被动和/或主动辅助运动,则这是有利的。这样的杆2108可以有利地允许在治疗装置1的支架4上的一个或多个手指运动导轨2的稳定布置,以执行患者的手指和/或手3的拇指的连续、被动和/或主动辅助运动。第一杆2108还可以有利地预定义第一接头2101和第二接头2102之间的结构距离,从而确定杠杆机械相互作用,尤其是用于掌指关节31弯曲的装置21的第二杆2109、第三杆2110和第四杆2111。可以说,杆2108可以有利地用作多关节铰链设计的距离测量装置,作为掌指关节31弯曲的装置21。
32.此外,一个实施例被证明是有用的,其中第二杆2109优选地通过第一接头2101可旋转地连接到第一杆2108。在这种情况下,第二杆2109可以有利地包括至少一个连接接头231,用于操作连接到运动驱动器23。图2示出了为此目的,例如,可在连接接头231上提供连接元件233,其可有利地使杆2109与运动驱动器23,尤其是线性驱动装置(也参见图4)进行可操作连接。例如,在与连接接头231相对的连接元件233的端部,可以将连接接头234布置到运动驱动器23的移动装置235。在操作期间,移动装置235随后可以沿着导轨232移动,并且反过来可以经由连接接头234移动连接元件233。通过连接接头231,连接元件233的这种运动然后可以特别地启动第二杆2109,并且因此最终启动设计为多关节铰链的整个装置21,用于掌指关节31的弯曲。运动驱动器23,尤其是其固定部件,例如导轨232,相对于第一杆2108保持刚性,也就是说,运动驱动器23相对于多关节铰链的方向,因为用于掌指关节31弯曲的装置21保持恒定。在图4中可以看出,通过这种方式,通过移动装置235沿导轨232的移动,运动驱动器23的线性驱动移动可以有利地转换为装置21的圆形移动,该装置21设计为多关节铰链,用于掌指关节31的弯曲,其中,有利地可以免除运动驱动器23相对于装置21的旋转,装置21设计为多关节铰链,用于掌指关节31的弯曲。这不仅允许治疗装置1的更紧凑设计,而且还促进例如到运动驱动器23的电缆布线,避免操作期间重复的电缆移动,从而有利地增加治疗装置1的使用寿命。
33.导轨232还可以有利地允许适应相应患者的结构条件,特别是适应手指长度的长度。
34.在本发明的另一优选实施例中,第三杆2110可通过第二接头2102有利地旋转连接至第一杆2108,其中,优选经由第四接头2104的第二杆2109和优选经由第三接头2103的第三杆2110可经由第四杆2111彼此旋转连接。如果第二接头2102和第三接头2103之间的距离约为第三接头2103和第五接头2105之间的距离的两倍,则这也是有利的。
35.此外,如果第三杆2110经由第五接头2105可旋转地连接到第五杆2112,则其已被证明是有用的。如果经由第七接头2107的第四杆2111和经由第六接头2106的第五杆2112经由连接杆2113彼此可旋转地连接,则这里是有利的。
36.图3示出了根据本发明的手指运动导轨2在弯曲位置的另一优选实施例的侧视图。可以看出,用于掌指关节31弯曲的装置21可以有利地允许手指围绕掌指关节31在
‑
15
°
到90
°
的角度范围内弯曲,相对于手指运动导轨2的纵轴la之间的角度bw,最好在0
°
到90
°
之间,具体而言,第一接头2101和第二接头2206之间的轴布置在第一枢轴杆2201和第六杆
2113之间,以及水平h(相当于一个手指以与手掌相同的方向延伸)。
37.最后,在本发明的另一个实施例中,用于弯曲近端指间关节32和/或远端指间关节33的机构22可有利地允许近端指间关节32和远端指间关节33的组合弯曲,其中,远端指骨331在弯曲末端大致平行于近端指骨311(再次参见图4中弯曲位置的另一实施例)。
38.用于掌指关节31弯曲的装置21和用于近端指间关节32和/或远端指间关节33弯曲的机构22经由(共用)连接杆2113的相互作用有利地允许在手指和/或手3的拇指的整个运动范围内解剖学上自然、自动的手指运动,其中有利地避免了对运动的限制,尤其是由放置在手指或拇指上的部件引起的限制。装置21设计为多关节铰链,用于掌指关节31的弯曲,能够抵抗轴向力和扭转力,特别是相对于手指运动导轨2的纵轴la,这有利地增加了由手指运动导轨2或治疗装置1执行的手指运动的抗干扰性。
39.本发明涉及一种手指运动导轨2和一种用于执行患者手指和/或拇指的连续、被动和/或主动辅助运动的治疗装置1。其特征在于,用于掌指关节31弯曲的装置21(沿各自手指和/或拇指横向布置)设计为多关节铰链,除了通过第一连接杆2113连接外,还通过至少一个第二(和/或第三)连接杆2203、2204连接,和至少一个连接接头2114、2115可操作地连接到机构22,该机构22也沿各自的手指和/或拇指侧向布置,用于近端指间关节32和/或远端指间关节33的弯曲。根据本发明的手指运动导轨2或包含该手指运动导轨2的治疗装置1对于压缩力、拉伸力和扭转力的影响,尤其是相对于手指运动导轨2的纵轴la而言,尤其更为坚固,并且它有利地允许更精确和更无干扰地执行解剖学上自然的自动手指运动,这增加了成功治疗的机会和装置的使用寿命。
40.与现有技术相比,根据本发明的治疗装置1或根据本发明的手指运动导轨2具有设计为多关节铰链的装置21,用于掌指关节31的弯曲,对于沿着手指运动导轨2的纵向轴线作用的压缩力和张力的作用,以及相对于手指运动导轨2的纵向轴线la的旋转力或扭转力的作用,该装置明显更坚固。这有利地允许更精确且更无干扰地执行解剖学上自然(椭圆形)的自动手指运动,这有利地增加治疗的成功。此外,相对于现有技术,该装置的使用寿命有利地增加。
41.附图标记
42.1 治疗装置
43.2 手指运动导轨
44.21 掌指关节弯曲的装置=多关节铰链
45.2101 第一接头
46.2102 第二接头
47.2103 第三接头
48.2104 第四接头
49.2105 第五接头
50.2106 第六接头
51.2107 第七接头
52.2108 第一杆
53.2109 第二杆
54.2110 第三杆
55.2111 第四杆
56.2112 第五杆
57.2113 连接杆
58.2114 第一连接接头
59.2115 第二连接接头
60.22 机构(用于近端指间关节和远端指间关节的弯曲)
61.2201 第一枢轴杆
62.2202 第二枢轴杆
63.2203 第二连接杆
64.2204 第三连接杆
65.2205 第一接头
66.2206 第二接头
67.2207 第三接头
68.2208 第四接头
69.23 运动驱动器
70.231 用于连接到运动驱动器 23 的连接接头
71.232 导轨
72.233 连接元件
73.234 移动装置 235 的连接接头
74.235 移动装置
75.26 用于固定至第一枢轴杆 2201 的第一紧固件和/或承载装置
76.27 用于紧固至第一连接杆 2113 的第二紧固和/或承载装置
77.3 手
78.30 手腕
79.31 掌指关节
80.311 近端指骨
81.32 近端指间关节
82.321 中指骨
83.33 远端指间关节
84.331 远端指骨
85.4 支架
86.40 上部结构
87.42 紧固装置
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。