1.本发明涉及图像处理领域,具体为一种快速自动对焦方法及系统。
背景技术:
2.目前,多基于图像信息的反差式对焦方法完成对焦,其主要包括如下步骤:选择对焦窗口的选择、选择清晰度函数以及搜索合焦位置。
3.其中,搜索合焦位置所采用的搜索策略是影响对焦精度和速度的关键因素,当前多采用爬山搜索算法完成合焦位置搜索,但是其存在以下问题:
4.1、若爬山搜索认为清晰度比值下降,则会越过清晰度峰值,易陷入局部最优值,抗干扰性差;
5.2、爬山搜索存在多次反向过程,由此加大了回程差的影响,且延长对焦时间,导致用户体验不佳。
技术实现要素:
6.针对现有技术的不足,本发明提供了一种自动对焦方法及系统,其可以实现快速对焦,且精细调焦范围较小,对焦精度高,客户体验佳。
7.为实现上述目的,本发明提供如下技术方案:
8.提供了一种自动对焦方法,其包括如下步骤:
9.参数初始化;
10.获取图像清晰度压缩基值;
11.完成初步对焦;
12.获取精细对焦范围;
13.根据所述精细对焦范围驱动电机转动至离精细对焦范围更近的一端,然后遍历精细对焦范围内每一图像的清晰度比值,直至确定图像清晰度比值最大的图像位置,以完成自动对焦。
14.优选的,“获取图像清晰度压缩基值”包括如下步骤:
15.获取电机当前位置hall;
16.若电机当前位置hall>midhall,则确定初步对焦时的电机起始位置starthall=电机远焦限位处的霍尔值farhall,初步对焦时电机可达到的最远位置endhall=电机近焦限位处的霍尔值nearhall;
17.若电机当前位置hall≤midhall,则确定初步对焦时的电机起始位置starthall=电机近焦限位处的霍尔值nearhall,初步对焦时电机可达到的最远位置endhall=电机远焦限位处的霍尔值farhall;其中,midhall=(nearhall farhall)/2;
18.驱动电机从当前位置hall转动至初步对焦时的电机起始位置starthall,且转动过程中获取若干图像;
19.将某一图像的清晰度比值作为图像清晰度压缩基值basec。
20.优选的,“完成初步对焦”包括如下步骤:
21.驱动电机转动,并在电机转动过程中实时获取电机在初步对焦过程中的若干个对焦位置;
22.若电机在初步对焦过程中的每一对焦位置<初步对焦时电机可达到的最远位置endhall,则在每一对焦位置获取与该对焦位置对应的图像,并获取与每一对焦位置分别对应的图像的清晰度值,并根据公式(1)获取每一图像的清晰度比值,以及对每一图像清晰度进行压缩;
23.k(i)=c(i)/basec
ꢀꢀ
(1);
24.若当前帧图像i的前一帧图像i
‑
1的清晰度比值k(i
‑
1)为除当前帧图像i外剩余所有图像清晰度比值中的最大值,则将图像清晰度峰值kmax所对应图像的后一帧图像的清晰度比值kmaxnext更新为kmaxnext=k(i);
25.在此基础上,若当前帧图像i的清晰度比值k(i)≥图像清晰度峰值kmax,则将图像清晰度峰值kmax更新为kmax=k(i),将与图像清晰度峰值kmax对应的图像清晰度峰值位置maxid更新为maxid=电机在初步对焦过程中的当前对焦位置,以及将图像清晰度峰值kmax所对应图像的前一帧图像的清晰度比值kmaxpre更新为kmaxpre=当前帧图像i的前一帧图像i
‑
1的清晰度比值kpre,且将连续未更新帧数nmax更新为nmax=0;
26.以及在完成对图像清晰度峰值kmax、图像清晰度峰值位置maxid以及前一帧图像的清晰度比值kmaxpre的更新后,再将当前帧图像i的前一帧图像i
‑
1的清晰度比值kpre更新为kpre=k(i)。
27.优选的,“完成初步对焦”还包括如下步骤:
28.若当前帧图像i的清晰度比值k(i)<图像清晰度峰值kmax,则直接将当前帧图像i的前一帧图像i
‑
1的清晰度比值kpre更新为kpre=k(i),并将连续未更新帧数nmax加1;
29.若图像清晰度峰值kmax≥完成清晰度压缩后所有图像的清晰度阈值kthr,且连续未更新帧数nmax≥连续未更新清晰度峰值的帧数阈值nthr,则初步对焦已完成。
30.优选的,若图像清晰度峰值kmax<完成清晰度压缩后所有图像的清晰度阈值kthr,和/或,连续未更新帧数nmax<连续未更新清晰度峰值的帧数阈值nthr,则重复上述“完成初步对焦”的步骤,直至图像清晰度峰值kmax≥完成清晰度压缩后所有图像的清晰度阈值kthr,且连续未更新帧数nmax≥连续未更新清晰度峰值的帧数阈值nthr。
31.优选的,“获取精细对焦范围”包括如下步骤:
32.根据电机正反向转动的合焦位置获取回程偏差,且对与图像清晰度峰值kmax对应的图像清晰度峰值位置maxid进行修正,以获得修正后的图像清晰度峰值位置maxid’;
33.根据与图像清晰度峰值kmax所对应图像的前一帧以及后一帧图像的清晰度比值以及修正后的图像清晰度峰值位置maxid’获取精细对焦范围。
34.优选的,“根据与图像清晰度峰值kmax所对应图像的前一帧以及后一帧图像的清晰度比值以及修正后的图像清晰度峰值位置maxid’获取精细对焦范围”包括如下步骤:
35.若图像清晰度峰值kmax所对应图像的前一帧图像的清晰度比值kmaxpre≥图像清晰度峰值kmax所对应图像的后一帧图像的清晰度比值kmaxnext,则确定精细对焦范围为maxid
’‑
vmax/f~maxid’,否则,精细对焦范围为maxid’~maxid’ vmax/f;其中f为图像设备的帧率,1/f为两帧图像的时间间隔。
36.优选的,若精细对焦范围为maxid’~maxid’ vmax/f,且初步对焦时的电机起始位置starthall=电机近焦限位处的霍尔值nearhall时,则离精细对焦范围更近的一端为maxid’ vmax/f;
37.若精细对焦范围为maxid’~maxid’ vmax/f,且初步对焦时的电机起始位置starthall=电机远焦限位处的霍尔值farhall时,则离精细对焦范围更近的一端为maxid’;
38.若精细对焦范围为maxid
’‑
vmax/f~maxid’,且初步对焦时的电机起始位置starthall=电机近焦限位处的霍尔值nearhall时,则离精细对焦范围更近的一端为maxid’;
39.若精细对焦范围为maxid
’‑
vmax/f~maxid’,且初步对焦时的电机起始位置starthall=电机远焦限位处的霍尔值farhall时,则离精细对焦范围更近的一端为maxid
’‑
vmax/f。
40.优选的,若电机在初步对焦过程中的每一对焦位置≥初步对焦时电机可达到的最远位置endhall,则直接执行“根据所述精细对焦范围驱动电机转动至离精细对焦范围更近的一端,然后遍历精细对焦范围内每一图像的清晰度比值,直至确定图像清晰度比值最大的图像位置,以完成自动对焦”的步骤。
41.还提供一种实现上述自动对焦方法的自动对焦系统,其包括:
42.电机位置获取单元,其用于获取电机位置;
43.参数初始化单元,其连接所述电机位置获取单元,用于确定初步对焦时的电机起始位置以及初步对焦时电机可达到的最远位置;
44.压缩基值获取单元,其连接所述参数初始化单元,用于将某一图像的清晰度比值作为图像清晰度压缩基值;
45.初步对焦单元,其用于根据驱动电机转动的过程中获得的电机在初步对焦过程中的当前对焦位置以及与每一对焦位置对应的若干图像完成初步对焦;
46.回程偏差获取单元,其用于根据电机正反向转动的合焦位置获取回程偏差;
47.峰值位置修正单元,其连接所述回程偏差获取单元,用于对与图像清晰度峰值对应的图像清晰度峰值位置进行修正,以获得修正后的图像清晰度峰值位置;
48.精细对焦范围获取单元,其连接所述峰值位置修正单元,用于根据与图像清晰度峰值所对应图像的前一帧以及后一帧图像的清晰度比值以及修正后的图像清晰度峰值位置获取精细对焦范围;
49.清晰度比较单元,其连接所述精细对焦范围获取单元,用于当根据所述精细对焦范围快速驱动电机转动至离精细对焦范围更近的一端,然后遍历精细对焦范围内每一图像的清晰度比值时,从中确定图像清晰度比值最大的图像位置,以完成自动对焦。
50.与现有技术相比,本发明具备以下有益效果:
51.本发明根据分布式对焦方法快速搜索到图像清晰度峰值位置,无需主动式测距传感器等部件即可实现快速对焦,且精细调焦范围较小,感官上不存在多次越过峰值,因此客户可在对焦过程中可更为精准的掌握图像清晰度的上升趋势,提升客户体验,同时采用回程差补偿电机转动时带来的正反向误差,进一步保证对焦精度。
附图说明
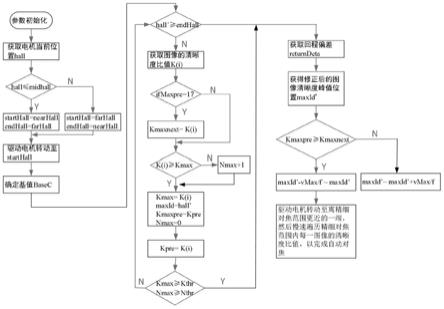
52.图1为本发明自动对焦方法的步骤流程图;
53.图2为本发明自动对焦系统的结构示意图。
具体实施方式
54.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
55.实施例1:
56.本实施例提供了一种自动对焦方法,如图1所示,其包括如下步骤:
57.s0、对自动对焦的参数进行初始化,其具体包括如下步骤:
58.使压缩后的图像清晰度峰值kmax=1,与该清晰度峰值对应图像的前一帧图像的清晰度比值kmaxpre=0,与该清晰度峰值对应图像的后一帧图像的清晰度比值kmaxnext=0,与该清晰度峰值kmax对应的图像清晰度峰值位置maxid=0,连续未更新帧数nmax=0,图像清晰度压缩基值basec=0,当前帧图像的前一帧图像的清晰度比值kpre=0,当前帧图像的前一帧图像的清晰度比值为除当前帧图像外剩余所有图像清晰度比值中的最大值ifmaxpre=0。
59.然后按照下述s1~s4为各参数重新赋值,以更新各参数,其具体包括如下步骤;
60.s1、获取图像清晰度压缩基值,其包括如下步骤:
61.在本实施例中,根据电机当前位置hall确定初步对焦时的电机起始位置starthall,驱动电机从当前位置hall转动至初步对焦时的电机起始位置starthall,且在转动过程中获取若干图像,将某一图像的清晰度比值作为图像清晰度压缩基值basec。
62.具体过程如下:
63.s11、获取电机当前位置hall;
64.s12、若电机当前位置hall>midhall,则确定初步对焦时的电机起始位置starthall=电机远焦限位处的霍尔值farhall,初步对焦时电机可达到的最远位置endhall=电机近焦限位处的霍尔值nearhall;
65.若电机当前位置hall≤midhall,则确定初步对焦时的电机起始位置starthall=电机近焦限位处的霍尔值nearhall,初步对焦时电机可达到的最远位置endhall=电机远焦限位处的霍尔值farhall;
66.其中,midhall=(nearhall farhall)/2;
67.s13、驱动电机从当前位置hall转动至初步对焦时的电机起始位置starthall,且转动过程中获取若干图像;
68.s14、将某一图像的清晰度比值作为图像清晰度压缩基值basec;其中,所述某一图像可以为电机运动至电机起始位置starthall处时所获取的图像。
69.s2、完成初步对焦,其具体包括如下步骤:
70.以最大速度vmax驱动电机转动,并在电机转动过程中实时获取电机在初步对焦过程中的若干个对焦位置hall1’、hall2’...hall(i
‑
1)’、hall(i)’、hall(i 1)’...(i≥2,且
为正整数);本实施例中,最大速度vmax的取值范围为800~1000pps之间;
71.若电机在初步对焦过程中的每一对焦位置<初步对焦时电机可达到的最远位置endhall,则在每一对焦位置获取与该对焦位置对应的图像1、2...i
‑
1、i、i 1...,并获取与每一对焦位置hall1’、hall2’...hall(i
‑
1)’、hall(i)’、hall(i 1)’...分别对应的图像1、2...i
‑
1、i、i 1...的清晰度值c(1)、c(2)...c(i
‑
1)、c(i)、c(i 1)...,并根据公式(1)获取每一图像的清晰度比值k(i),以及对每一图像清晰度进行压缩;
72.k(i)=c(i)/basec
ꢀꢀ
(1);
73.例如,电机先转动至对焦位置hall1’,则获取与该对焦位置hall1’对应图像的清晰度比值c(1),计算获取清晰度比值k(1),并对该图像清晰度进行压缩,然后电机继续转动至对焦位置hall2’,重复上面步骤,获取下一图像的清晰度比值k(2)....以此重复,直至获取与每一对焦位置分别对应图像的清晰度比值,并完成每一图像清晰度的压缩;
74.若当前帧图像i的前一帧图像i
‑
1的清晰度比值k(i
‑
1)为除当前帧图像i外剩余所有图像清晰度比值中的最大值(即ifmaxpre=1),则将图像清晰度峰值kmax所对应图像的后一帧图像的清晰度比值kmaxnext更新为kmaxnext=k(i);若当前帧图像i的前一帧图像i
‑
1的清晰度比值k(i
‑
1)不为除当前帧图像i外剩余所有图像清晰度比值中的最大值(即ifmaxpre≠1),则无需更新图像清晰度峰值kmax所对应图像的后一帧图像的清晰度比值kmaxnext,直接进入下述判断步骤。
75.在此基础上,若当前帧图像i的清晰度比值k(i)≥图像清晰度峰值kmax,则将图像清晰度峰值kmax更新为kmax=k(i),将与图像清晰度峰值kmax对应的图像清晰度峰值位置maxid更新为maxid=电机在初步对焦过程中的当前对焦位置,以及将图像清晰度峰值kmax所对应图像的前一帧图像的清晰度比值kmaxpre更新为kmaxpre=当前帧图像i的前一帧图像i
‑
1的清晰度比值kpre,且将连续未更新帧数nmax更新为nmax=0;进一步的,在完成对kmax、maxid以及kmaxpre的更新后,再将当前帧图像i的前一帧图像i
‑
1的清晰度比值kpre更新为kpre=k(i),以为kpre重新赋值。
76.若当前帧图像i的清晰度比值k(i)<图像清晰度峰值kmax,则直接将当前帧图像i的前一帧图像i
‑
1的清晰度比值kpre更新为kpre=k(i),并将连续未更新帧数nmax加1;
77.进一步的,若图像清晰度峰值kmax≥完成清晰度压缩后所有图像的清晰度阈值kthr,且连续未更新帧数nmax≥连续未更新清晰度峰值的帧数阈值nthr,则认为越过图像清晰度峰值,初步对焦已完成,此时保存图像清晰度峰值kmax、与图像清晰度峰值kmax对应的图像清晰度峰值位置maxid、图像清晰度峰值kmax所对应图像的后一帧图像的清晰度比值kmaxnext以及图像清晰度峰值kmax所对应图像的前一帧图像的清晰度比值kmaxpre。
78.s3、若图像清晰度峰值kmax<完成清晰度压缩后所有图像的清晰度阈值kthr,和/或,连续未更新帧数nmax<连续未更新清晰度峰值的帧数阈值nthr,则重复步骤s2,以更新相应的参数,直至图像清晰度峰值kmax≥完成清晰度压缩后所有图像的清晰度阈值kthr,且连续未更新帧数nmax≥连续未更新清晰度峰值的帧数阈值nthr。
79.s4、获取精细对焦范围,其具体包括如下步骤:
80.对同一个场景、多次往返对焦时,根据电机正反向转动的合焦位置获取回程偏差returndeta(可通过校准装置单独测量获取),且根据公式(2)对与图像清晰度峰值kmax对应的、更新后的图像清晰度峰值位置maxid进行修正,以获得修正后的图像清晰度峰值位置
maxid’:
81.maxid’=maxid
±
returndeta
ꢀꢀ
(2);
82.根据与图像清晰度峰值kmax所对应图像的前一帧以及后一帧图像的清晰度比值以及修正后的图像清晰度峰值位置maxid’获取精细对焦范围,其包括如下步骤:
83.若图像清晰度峰值kmax所对应图像的前一帧图像的清晰度比值kmaxpre≥图像清晰度峰值kmax所对应图像的后一帧图像的清晰度比值kmaxnext,则确定精细对焦范围为maxid
’‑
vmax/f~maxid’,否则,精细对焦范围为maxid’~maxid’ vmax/f;其中f为图像设备的帧率,1/f为两帧图像的时间间隔;
84.以及s5、根据所述精细对焦范围快速驱动电机转动至离精细对焦范围更近的一端,然后慢速遍历精细对焦范围内每一图像的清晰度比值,直至确定图像清晰度比值最大的图像位置,以完成自动对焦;
85.其中,若精细对焦范围为maxid’~maxid’ vmax/f,且初步对焦时的电机起始位置starthall=电机近焦限位处的霍尔值nearhall时,则离精细对焦范围更近的一端为maxid’ vmax/f;
86.若精细对焦范围为maxid’~maxid’ vmax/f,且初步对焦时的电机起始位置starthall=电机远焦限位处的霍尔值farhall时,则离精细对焦范围更近的一端为maxid’;
87.同理,若精细对焦范围为maxid
’‑
vmax/f~maxid’,且初步对焦时的电机起始位置starthall=电机近焦限位处的霍尔值nearhall时,则离精细对焦范围更近的一端为maxid’;
88.若精细对焦范围为maxid
’‑
vmax/f~maxid’,且初步对焦时的电机起始位置starthall=电机远焦限位处的霍尔值farhall时,则离精细对焦范围更近的一端为maxid
’‑
vmax/f。
89.此外,若电机在初步对焦过程中的每一对焦位置≥初步对焦时电机可达到的最远位置endhall,则直接执行步骤s5。
90.由此,本实施例中通过先经过参数初始化确定图像清晰度压缩基值,然后对图像清晰度比值进行压缩,再根据压缩后的图像清晰度比值依次完成快速初步对焦和慢速精细对焦(即分布式对焦方法),由此可快速搜索到图像清晰度峰值位置,无需主动式测距传感器等部件即可实现快速对焦,且精细调焦范围较小,感官上不存在多次越过峰值,因此客户可在对焦过程中可更为精准的掌握图像清晰度的上升趋势,提升客户体验,同时采用回程差补偿电机转动时带来的正反向误差,进一步保证对焦精度。
91.实施例2:
92.本实施例提供了一种实现实施例1所述自动对焦方法的自动对焦系统,如图2所示,其包括:
93.电机位置获取单元1,其用于获取电机位置;本实施例中,所述电机位置获取单元1包括光电传感器等位置检测设备;
94.参数初始化单元2,其连接所述电机位置获取单元1,用于确定初步对焦时的电机起始位置以及初步对焦时电机可达到的最远位置,其确定过程与步骤s12相同,不再赘述;
95.压缩基值获取单元3,其连接所述参数初始化单元2,用于将某一图像的清晰度比
值作为图像清晰度压缩基值;所述图像来自于驱动电机从当前位置转动至初步对焦时的电机起始位置的过程;
96.初步对焦单元4,其用于根据以最大速度vmax驱动电机转动的过程中获得的电机在初步对焦过程中的当前对焦位置以及与每一对焦位置对应的图像完成初步对焦,其初步对焦过程与步骤s2
‑
s3相同,不再赘述;
97.回程偏差获取单元5,其用于根据电机正反向转动的合焦位置获取回程偏差;
98.峰值位置修正单元6,其连接所述回程偏差获取单元5,用于根据公式(2)对与图像清晰度峰值对应的图像清晰度峰值位置进行修正,以获得修正后的图像清晰度峰值位置;
99.精细对焦范围获取单元7,其连接所述峰值位置修正单元6,用于根据与图像清晰度峰值所对应图像的前一帧以及后一帧图像的清晰度比值以及修正后的图像清晰度峰值位置获取精细对焦范围,其获取过程与步骤s4相同,不再赘述;
100.清晰度比较单元8,其连接所述精细对焦范围获取单元7,用于当根据所述精细对焦范围快速驱动电机转动至离精细对焦范围更近的一端,然后遍历精细对焦范围内每一图像的清晰度比值时,从中确定图像清晰度比值最大的图像位置,以完成自动对焦,其过程与步骤s5相同,不再赘述。
101.综上所述,本发明根据压缩后的图像清晰度比值依次完成快速初步对焦和慢速精细对焦(即分布式对焦方法),由此可快速搜索到图像清晰度峰值位置,无需主动式测距传感器等部件即可实现快速对焦,且精细调焦范围较小,感官上不存在多次越过峰值,因此客户可在对焦过程中可更为精准的掌握图像清晰度的上升趋势,提升客户体验,同时采用回程差补偿电机转动时带来的正反向误差,进一步保证对焦精度。
102.需要说明的是,上述实施例1至2中的技术特征可进行任意组合,且组合而成的技术方案均属于本技术的保护范围。且在本文中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
103.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。