用于将电缆安装到电力线导体上的无线轴光纤电缆构型
1.相关申请的交叉引用
2.本技术要求于2019年5月10日提交的美国申请第62/846,119号、2019年11月27日提交的美国申请第62/941,615号和2020年5月5日提交的美国申请第16/867,313号的优先权。出于所有目的,美国申请第62/846,119号、美国申请第62/941,615号和美国申请第16/867,313号的内容通过引用以其整体并入本文。
3.附图简述
4.附图示出了许多示例性实施例,并且是说明书的一部分。结合以下描述,这些附图展示并解释了本公开的各种原理。
5.附图示出了许多示例性实施例,并且是说明书的一部分。结合以下描述,这些附图展示并解释了本公开的各种原理。
6.图1是包括电力线导体的示例性操作环境的图解表示,各种示例性实施例可以应用于该操作环境。
7.图2是可用于机器人系统中的示例性负载子系统(payload subsystem)的局部透视图,该机器人系统用于围绕电力线导体安装光纤电缆。
8.图3是示例性电缆束变换的端视图,该电缆束变换用于将初始的无线轴光纤电缆束成形或变换成用于围绕电力线导体安装的可部署的束(deployable bundle)。
9.图4是制造可部署的光纤电缆束的方法的流程图。
10.图5包括用于光纤电缆段的预扭转装置的透视图。
11.图6是用于光纤电缆段的施蜡装置的透视图。
12.图7是用于光纤电缆段的另一种施蜡装置的透视图。
13.图8和图9分别是示例性变形装置的透视图和俯视图,该变形装置将初始的光纤电缆束变形为可部署的光纤电缆束。
14.在全部附图中,相同的参考符号和描述指示相似的但不一定相同的元件。虽然本文所述的示例性实施例容许各种修改和替代形式,但是特定的实施例在附图中作为示例被示出并且在本文将被详细描述。然而,本文描述的示例性实施例并不旨在受限于所公开的特定形式。相反,本公开覆盖了落入所附权利要求范围内的所有修改、等同物和替代物。
15.示例性实施例的详细描述
16.可以采用机器人设备、通过将光纤电缆围绕电力线导体螺旋地缠绕的方式来将光纤电缆安装到预先存在的电力基础设施(例如用于电力传输和分配线路的电力线导体)上。这种安装可以受益于与电力分配系统相关联的预先存在的公共事业用地和对应的基础设施(例如,电力导体、电塔或电线杆等)的使用。在一些示例中,这种机器人设备可以包括驱动子系统,该驱动子系统使得机器人设备沿着电力线导体行进(例如,在塔或杆之间),同时该设备的旋转子系统使光纤电缆围绕导体螺旋地缠绕。
17.传统上,机器人设备将光纤电缆承载在线轴上,随着电缆围绕电力线导体缠绕,电缆从线轴上放出。此外,为了便于缠绕,线轴通常安装在围绕电力线导体旋转的机械臂上。此外,有时采用配重来平衡线轴的重量,从而增加机器人系统的总重量。
18.本公开总体上涉及用于提供“无线轴(spool
‑
free)”光纤电缆构型或束的系统和方法,用于将光纤电缆安装在电力线导体上。如下文将更详细解释的,与较传统的光纤电缆安装系统相比,本公开的实施例可以有助于更低质量的可部署的光纤电缆束,并且该可部署的光纤电缆束可以更靠近电力线导体定位,以促进机器人系统的机械稳定性。
19.根据本文描述的一般原理,本文描述的任何实施例的特征可以彼此组合使用。通过结合附图阅读以下详细描述,将更全面地理解这些和其他实施例、特征和优点。
20.参考图1
‑
图9,下面将提供用于为在电力线导体上安装电缆提供无线轴光纤电缆构型的装置和方法的详细描述。结合图1提供了对其中可以采用用于安装光纤电缆的机器人系统的示例性操作环境的简要描述。结合图2讨论了可以与这种机器人系统一起使用的示例性负载子系统。结合图3描述了用于将初始的光纤电缆束成形为用于安装在电力线导体上的可部署的束的示例性无线轴光纤电缆束变换,并且结合图4讨论了提供这种可部署的束的方法。结合图5
‑
图9,描述了在提供无线轴电缆构型过程中涉及的各种装置和操作。
21.图1是示例性操作环境100的图解表示,本文公开的各种实施例可以在该操作环境中使用。如图1的示例所描绘的,操作环境100可以包括电力传输或分配系统,该电力传输或分配系统具有承载多个电力线导体101的多个电线杆102。电力线导体101的示例可以包括绞合电缆,然而电力线导体101不限于这样的实施例。尽管可以经由电线杆102承载任何数量的电力线导体101,但是为了视觉上简单起见,在图1中示出了两个电力线导体101。在一些示例中,电力线导体101经由绝缘体104机械地联接到电线杆102,但是在各种实施例中可以利用其他类型的部件,例如,分接头(tap)、固定器(standoff)等。虽然这里具体引用了电线杆102,但是任何类型的电线杆、h形框架、格子塔或承载或支撑一个或更多个电力线导体101的其他类型的杆或塔都可以被包括并涵盖在下面讨论的操作环境100的各种实施例中。另外,电力线导体101可以包括一个或更多个相导体、地线、导电丝或由电线杆102、塔等支撑的其他导体。
22.仍然如图1所示,光纤电缆112与电力线导体101对齐并机械地联接到电力线导体101。在一些实施例中,光纤电缆112可以(诸如通过人力或电动机器人设备)围绕电力线导体101螺旋地缠绕。然而,在电力线导体101与光纤电缆112之间的其他物理关系也是可能的。尽管在图1中只描绘了一根光纤电缆112,但使用相同电线杆102的多个电力线导体101可以各自具有附接到其上或以其他方式联接到其上的对应的光纤电缆112。如图1所描绘的,光纤电缆112可以经由一个或更多个电缆夹106固定到电力线导体101。在一些示例中,光纤电缆112可以沿着与正在传输的电力的特定相关联的电力线导体101,或者光纤电缆112可以在两个或三个不同相之间交替。此外,每根光纤电缆112可以承载一根或更多根光纤,以便于在操作环境100内的通信。
23.另外,图1示出了光纤接头盒108,在一些实施例中,该光纤接头盒108将光纤电缆112的光纤的对应端接在一起。例如,可以联接到电力线导体101的光纤电缆112的相对长的段(stretch)(例如,几公里的跨距)可以机械地联接在一起、热熔合在一起、或者以其他方式联接在光纤接头盒108中,光纤接头盒108可以包括光耦合器、放大器和/或其他部件,以便于将光数据信号从光纤电缆112的一个跨距传输到下一个跨距。另外,在一些实施例中,光纤接头盒108可以包括无线接入点和其他联网部件(例如,用于与物联网(iot)设备、智能电网传感器(例如,电压传感器、电流传感器等)以及用户接入网通信)。此外,光纤接头盒
108可以包括用于测量电力线状况的光学、电磁和其他类型的传感器;用于测量温度、湿度等的环境传感器;用于监控的摄像机等等。为了给这些部件供电,光纤接头盒108还可以包括太阳能电池和/或电池组。在一些示例(诸如图1所示的示例)中,光纤接头盒108可以附接到或定位在电力线导体101上或附近,而不是安装在电线杆102的下部,因此潜在地消除了相接地过渡件(phase
‑
to
‑
ground transition)的使用,相接地过渡件原本可以与每段光纤电缆112联接以提供与电力线导体101的电绝缘。
24.图2是示例性负载子系统200的局部透视图,该负载子系统200可以被配置为承载光纤桶202,将要安装在电力线导体101上的一段光纤电缆112被存储在该光纤桶202内。在一些示例中,负载子系统200,在被沿着电力线导体101平移的机器人系统承载时,可以围绕电力线导体101旋转以放出光纤电缆112,从而将光纤电缆112围绕电力线导体101螺旋地缠绕。
25.更具体地,如图2所示,在一些实施例中,负载子系统200可以包括桶支架板208,光纤桶202可以搁置在该桶支架板208上。另外,枢转保持管205可以围绕对应的铰链枢转,并且通过使用快速释放销207使枢转保持管205的自由端固定来限制光纤桶202。因此,光纤桶202可以可移除地附接到负载子系统200,从而便于在安装到负载子系统200上之前,经开口(该开口可以由桶盖203盖住)将一段光纤电缆112装载到光纤桶202中。此外,桶盖203可以包括光纤孔204,光纤电缆112可以在安装过程中穿过该光纤孔204抽出。在操作中,在负载子系统200围绕可与电力线导体101重合的旋转轴250旋转(例如,通过在旋转结构220上操作的马达,该旋转结构220可以包括环、轴承等)的同时,机器人系统(负载子系统200是其一部分)可以沿着电力线导体101在平移方向260上行进。因此,当光纤电缆112的一端联接到电力线导体101时,在机器人系统沿着电力线导体101平移期间,负载子系统200的旋转导致光纤电缆112围绕电力线导体101螺旋地缠绕。另外,在一些示例中,当光纤电缆112围绕电力线导体101缠绕时,光纤电缆112在离开光纤桶202时可以穿过的张紧器组件230可以控制光纤电缆112的张紧量(例如,使用一个或更多个离合器片或其他摩擦引发机构)。
26.如图所示,光纤桶202可以被成形成限定狭槽206,当光纤桶202被安装在负载子系统200上时,该狭槽206可以至少部分地环绕电力线导体101,因此可能导致光纤桶202中的该段光纤电缆112的质心相对于严格圆柱形的桶保持靠近电力线导体101。更具体地,在一些示例中,光纤桶202可以围绕电力线导体101转动或环绕运行,并且进一步地,每围绕电力线导体101转动一圈,可以旋转一次,如可以从图2的图示中得到的。因此,在安装操作期间,负载子系统200(包括在光纤桶202内的光纤电缆112在内)的质心可以保持靠近电力线导体101,从而促进机器人系统始终机械平衡和稳定(例如,不使用配重或其他机械平衡结构)。
27.图3是在用于安装在电力线导体101上的机器人系统上部署之前,一束光纤电缆112的电缆束变换300的表示的端视图(或横截面图)。更具体地,光纤电缆112的初始的束302(例如,圆形圈(coil))可以被变换(例如,通过机械力重新成形)为可部署的束304,该可部署的束304通常可以符合光纤桶202的内部形状,以放置在其中,用于安装在电力线导体101上,如上所述。此外,在一些实施例中,初始的束302的成形可导致可部署的束304在可部署的束304外部限定狭槽306(例如,在形成可部署的束304的光纤电缆112的圈的外部),该狭槽306与光纤桶202的狭槽206对准,这允许光纤桶202和封闭的可部署的束304拥有位于电力线导体101附近的质心,这是由于在光纤电缆112围绕电力线导体101螺旋缠绕期间光
纤桶202和可部署的束304至少部分地围绕着电力线导体101。另外,在一些示例中,可部署的束304可以被构造成使得可部署的束304(在成形操作期间或之后)在可部署的束304中的任何位置都不违反光纤电缆112的最小弯曲半径要求(如光纤电缆112的制造商所引用的)。
28.在一些实施例中,“内部卷绕”过程(例如,导致光纤电缆112从最靠近可部署的束304的中心轴线的可部署的束304的内表面放出的卷绕过程)可以用于一些光纤电缆1122(例如,拥有大约八分之一英寸直径的光纤电缆112)。该实施例可以使用精确卷绕(例如,光纤电缆112的每一匝都与紧接的前一匝或后一匝接触的电缆构型)来使封装密度最大化。然而,在其他实施例中,可以利用螺旋卷绕(例如,可部署的束304,其中光纤电缆112的匝可以形成堆叠在彼此之上的螺旋,但是其中每匝可以不接触紧接的前一匝或后一匝)来允许更高速度的电缆放出,代价是电缆封装密度。
29.虽然上述实施例对于可部署的束304的最终形状采用了直段和弯曲段的组合,但是在其他实施例中可以使用其他形状的可部署的束304。
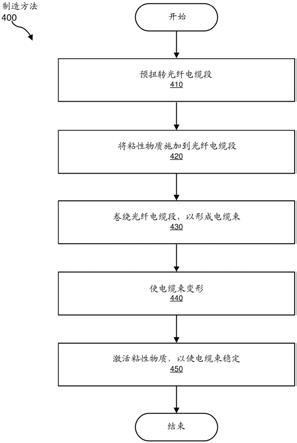
30.图4是制造用于光纤电缆112的无线轴构型(例如,可部署的束304)的方法400的流程图。图4所示的步骤可以由任何合适的装置执行,包括下面更详细描述的装置。在一个示例中,图4中所示的每个步骤可以表示由基于处理器的系统执行的算法,其中该算法包括多个子步骤和/或由多个子步骤表示,这些子步骤的示例在下面更详细地描述。
31.如图4所示,在步骤410,一段光纤电缆112可以被“预扭转”,使得在安装到电力线导体101上期间,光纤电缆112在围绕电力线导体101螺旋缠绕时不拥有不期望的扭转,不期望的扭转可能在光纤电缆112上施加束缚或其他不适当的应力(例如,通过预扭转基本上抵消在螺旋缠绕期间可能发生的光纤电缆112的扭转)。在步骤420,可以将粘性物质(例如蜡)施加到该段光纤电缆112上(例如,使得该段光纤电缆112随后可以在装载到光纤桶202中期间、在将光纤电缆112安装到电力线导体101上期间等保持其构型(例如,可部署的束304))。在步骤430,光纤电缆112的段可以被卷绕,以形成电缆束(例如,基本上圆形的束)。在步骤440,电缆束可以变形(例如,以诸如通过电缆束变换300形成非圆形可部署的束304或构型,其有助于束在围绕电力线导体101旋转时靠近电力线导体101定位)。在步骤450,粘性物质可以被激活(例如,被加热),以使束稳定(例如,将束结合在一起,使得它可以保持其当前构型)。
32.虽然方法400包含以特定顺序的一组特定操作,但是一些步骤410
‑
450可以组合,并且一些步骤410
‑
450的顺序可以改变。例如,可以在如本文所述的内部卷绕电缆束的形成期间施加粘性物质,或者可以在电缆制造过程中在装载到制造商提供的卷轴上之前施加粘性物质。可替代地,当线轴缠绕到变形夹具卷轴上时,粘性物质可以被喷洒到线轴上。方法400的其他变化也是可能的。此外,如本文所使用的,粘性物质可以是任何化合物或拥有至少一些粘合性质(例如,将光纤电缆112的部分临时粘合到其自身,以保持束)的其他物质,并且不限于通常被归为粘合剂的物质。
33.图5
‑
图9描绘了可用于提供无线轴电缆构型的可能的装置的各种视图。然而,在其他实施例中,可以使用本文没有具体描述的其他可能的装置。例如,图5包括用于一段光纤电缆112的预扭转装置500的透视图。在一些实施例中,光纤电缆112的可接受的预扭转或预扭曲可以取决于在将光纤电缆112放出在电力线导体101上期间所产生的可部署的束304的定向方式。对于螺旋缠绕操作的情况,如上所述,可接受的预扭转可以特定于执行安装的机
器人系统的实施方式。此外,如果机器人系统被配置为当它使可部署的束304围绕电力线导体101绕行时旋转可部署的束304,则预扭转可以被配置为小于尾纤扭转(pigtail twist)的完全消除,使得预扭转和可部署束304的旋转的组合导致安装的光纤电缆112以几乎没有扭转的方式围绕电力线导体101缠绕。
34.在一些实施例中,当光纤电缆112被进给到卷取线轴上时,可以通过端对端地(end
‑
over
‑
end)转动源线轴来执行预扭转。可替代地,预扭转可以通过以下方式产生:(1)从制造商处获取线轴上的光纤电缆112,该线轴的毂直径、线轴高度和电缆厚度等于目标线轴或卷轴的厚度、直径和高度,以及(2)将光纤电缆112放置在“飞行夹具(fly fixture)”中,并将光纤电缆112放出到任意尺寸的中间线轴上(例如,线轴足够大,以承载该段光纤电缆112的总光纤长度)。
35.图5包括预扭转装置500的各种透视图,该预扭转装置500可用作上述飞行夹具。虽然图5和本文呈现的其他图示描述了用于执行各种操作的各种类型的原型级装置,但是其他实施例可以以与本文描述的那些装置类似的方式操作,同时与高生产量的生产环境更加兼容。
36.在一些实施例中,预扭转装置500可以包括基板(在图5中不可见),固定杆501安装在基板的中部。源线轴502可以放置在基板上,其中杆501穿过源线轴502的中部。可以基于是期望顺时针还是逆时针预扭转来选择源线轴502的定向。预扭转装置500的臂506枢转地附接到杆501,并从杆501沿径向延伸。在一些示例中,臂506可以包括旋转接头508,以允许臂506相对于固定杆501旋转。旋转接头508的示例可包括但不限于扭矩离合器、磁性离合器、滚珠轴承、限速轴承、单向轴承或另一种类型的旋转接头。在一个实施例中,旋转接头508可以包括弹簧加载的棘爪和棘轮接头。在臂506的远端处或远端附近,光纤导向器510可以被竖直地保持。光纤导向器510的端部可以是弯曲的,以允许光纤电缆112从源线轴502的表面穿过光纤导向器510并向上,而不违反光纤电缆112的最小弯曲半径。在一个实施例中,光纤导向器510可以是不粘管,并且其内径和刚度与光纤电缆112的要求相匹配。在预扭转装置500的杆501上方,光纤电缆112可以通过漏斗或一对互锁的v形槽轮(图5中未示出)收集。光纤电缆112可以经过一系列辊512连同张紧线轴504,张紧线轴504可以与磁制动器或离合器联接,以控制光纤电缆112的张力(例如,在离开和/或进入张紧线轴504的光纤电缆112的一部分上的张力)。
37.在预扭转装置500中存在中间线轴(图5中未示出)以用于从张紧线轴504接收预扭转的光纤电缆112,这可以有助于光纤电缆112到最终线轴或卷轴(图5中也未示出)上的正确定向,如下所述。例如,如果光纤电缆112从源线轴502(例如,通过张紧线轴504)直接放出到最终或目标卷轴或线轴,则位于源线轴502上的最外层的光纤电缆112可成为目标线轴或卷轴上的最内层的光纤电缆112。由于预扭转装置500以等于源线轴502上的光纤电缆112的周长的间距扭转光纤电缆112,因此为了使该预扭转消除最终电缆束(例如,可部署的束304)的尾纤效应,可能需要交换光纤电缆112的端部的顺序,使光纤电缆112的起点变成光纤电缆112的终点,以及反之将光纤电缆112的终点变成光纤电缆112的起点。在进行到将光纤电缆112卷绕到最终的卷轴或线轴上之前,可以通过首先将来自张紧线轴504的光纤电缆112卷绕到中间线轴上来执行这种交换,如下所述。
38.在操作中,使用预扭转装置500,光纤电缆112可以被拉动经过辊512和张紧线轴
504,这又可以导致光纤电缆112从源线轴502被拉出。作为响应,臂506可以围绕杆501摆动,同时引导光纤电缆112越过源线轴502的凸缘。为了防止不必要的运动,旋转接头508可用于抑制臂506的向后行进或限制臂506的旋转速度。
39.在使用预扭转装置502作为飞行机构时,在不转动源线轴502的情况下从源线轴502放出光纤电缆112使光纤电缆112预扭转。通过以这种方式设置线轴放出条件,所产生的预扭转可以被定向成与从最终内卷绕的可部署的束304放出光纤电缆时可能出现的所产生的扭转方向相反,从而消除该扭转。为了增强这种消除的效果,源线轴502的周长、高度和定向可以与最终线轴或卷轴的周长、高度和定向相匹配(例如,通过使用中间线轴)。
40.图6是用于一段光纤电缆112的施蜡装置600的透视图。如前所述,蜡或另一种粘性物质可以在制造光纤电缆112期间施加(例如,施加到光纤电缆112的护套上,该护套可以包括聚乙烯、交联聚乙烯或另一种材料),或者通过在卷绕操作期间(而不是作为该过程中的中间步骤)喷涂到最终的卷轴或线轴上,如本文所概述的。在一些示例中,施蜡装置600的使用可以导致在光纤电缆112的护套上沉积薄的蜡涂层。在一些实施例中,期望的涂层厚度可以在30至100微米之间。此外,在一些示例中,蜡可以被施加,使得当光纤电缆112位于线轴或卷轴上时,蜡不会将光纤电缆112的各层结合在一起,直到该过程的稍后阶段。在一些示例中,可以使用蜡喷雾器将蜡雾化成小颗粒,这些小颗粒像灰尘一样沉淀在光纤电缆112的表面上,而不会粘附或结合到该表面。在其他实施例中,蜡可以涂覆在光纤电缆112的护套上,同时确保在光纤电缆112卷绕到线轴或卷轴上之前蜡被完全干燥或冷却,以防止光纤电缆112的各层过早地结合在一起。
41.下面描述了一种将蜡作为涂层施加到光纤电缆112上的方法(例如,使用施蜡装置600)。然而,用于施加蜡或另一种粘合剂的其他方式也是可能的,如图7所示的施蜡装置700中所描绘的。在图6的实施例中,光纤电缆112可以从起始线轴(图6中未示出)被进给。在一些示例中,可以由张紧机构控制来自起始线轴的放出张力。在一个实施例中,张紧机构可以包括具有可调张力的磁滞制动器。起始线轴可以是承载来自预扭转装置500的输出的线轴(例如,如上所述的中间线轴)。在一些实施例中,在被传递到施蜡装置600之前,起始线轴和/或光纤电缆112可以被加热。
42.在一些实施例中,从起始线轴开始。光纤电缆112可以经过一组惰辊(图6中未示出),以改变定向,以向下引导光纤电缆112。在一些示例中,施蜡装置600可以包括两对辊(例如,第一辊对602和第二辊对604),其是齿轮传动的,使得中央轴安装齿轮606将第一辊对602一起转动,以向下推动放置在第一辊对602之间的光纤电缆112,而第二辊对604向上推动光纤电缆112(例如,以与第一辊对602对光纤电缆112施加的速度相同的速度)。在一些示例中,第一辊对602和第二辊对604可以是履带拉出器(caterpillar pullers)的形式,或者具有改善对光纤电缆112的抓持的纹理。中央轴安装齿轮606可以由马达驱动,或者经由皮带、链条或其他齿轮连接到马达,马达也可以在施加粘合剂后驱动光纤电缆112的卷取卷轴(图6中未描绘)。在第一辊对602和第二辊对604之间,基于第一辊对602和第二辊对604一起被齿轮传动而使得等量的光纤电缆112被第一辊对602向下进给,同时还被第二辊对604向上拉动,光纤电缆112可以形成一致的u形。在一些示例中,光纤电缆112的u形的至少一部分可以浸入蜡池608中。将光纤电缆112浸入蜡池608或类似装置中的其它方法可用于其它示例中,诸如将浸没辊702放置在蜡池608中(例如,如图7的施蜡装置700所示),在该方法
下,光纤电缆112通过履带拉出器或齿轮传动的辊推动和/或拉动在浸没辊702的任一侧的光纤电缆112来行进,以将光纤电缆112保持处于张紧,从而在光纤电缆112穿过蜡池608和/或其他部件时提供对光纤电缆112的增强的控制。
43.在一些实施例中,蜡池608可以是熔融蜡或类似材料的加热池。此外,施蜡装置600可以包括刮板或其他减蜡部件(图6中未示出)。蜡的熔池可以被设置到产生蜡的期望粘度的温度,同时防止光纤电缆112受到可能不利地影响光纤电缆112的操作的温度的影响。在一些示例中,蜡可以是石蜡或被调整以改善对光纤电缆112的护套的粘附性同时保持相对低的熔化温度的另一种配方。此外,在一些实施例中,蜡可以是与乙酸乙烯酯混合的石蜡。此外,蜡和乙酸乙烯酯共混物可以进一步与粘合剂(例如,环境触发的粘合剂,诸如低能紫外线激活的粘合剂、水激活的粘合剂等)混合,或者粘合剂可以在施加蜡或蜡/乙酸乙烯酯共混物之前施加到光纤电缆112上。因此,在一些示例中,当光纤电缆112的段由机器人系统安装到电力线导体101上时,粘合剂可以被动地由环境激活,或者更主动地激活(例如,通过机器人系统上携带的紫外线灯)。因此,在光纤电缆112安装在电力线导体101上之后被切断的情况下,粘合剂可以防止光纤电缆112从电力线导体101脱离并产生危险。
44.蜡池608可以包括具有两个开口或孔的盖子610,一个开口或孔用于光纤电缆112进入蜡池608,另一个开口或孔用于光纤电缆112离开。在一些示例中,离开孔可用于支撑刮板,以擦去光纤电缆112上的多余蜡。刮板可以由橡胶、毛毡或其他这样的材料制成。在橡胶的情况下,刮板可以是具有适当选择的孔口(例如,基于光纤电缆112的直径)的橡胶片704的形式(如图7的施蜡装置700所示)。在离开刮板之后,光纤电缆112然后可以穿过气刀612或其他机构,以冷却光纤电缆112上的蜡。当采用气刀612时,在将空气吹到光纤电缆112上之前,涡流冷却器可用于进一步冷却空气。在一些示例中,气刀612可以被封装在管706内(如在施蜡装置700中所示),以将冷却的空气进一步集中在光纤电缆112周围。冷却后,光纤电缆112可穿过第二辊对604,第二辊对604可将光纤电缆112向上拉到第二组惰辊(图6中未示出)上,第二组惰辊可将光纤电缆112引导到卷取卷轴上。
45.图8和图9分别是变形装置800的透视图和俯视图,该变形装置800用于配置一段光纤电缆112,以部署在用于在电力线导体101上安装的机器人系统中,如上所述。如上面所指出的,在离开上述施蜡过程后,光纤电缆112可以卷绕到卷取卷轴上。在一些实施例中,卷取卷轴可以是图8和图9的电缆卷轴801,其可以被特别设计成能够通过变形装置800使光纤电缆112的束变形。然而,在其他实施例中可以使用本文没有具体讨论的其他形状和结构的电缆卷轴801和变形装置800。
46.电缆卷轴801可以包括三个区部:上凸缘802、毂区部(在图8中很大程度上被卷绕在其上的一段光纤电缆112遮挡)和下凸缘804。上凸缘802和/或下凸缘804可以包括多个孔口和/或特征,这些孔口和/或特征可以与变形装置800的其他特征相互作用,以在光纤电缆112变形时将电缆卷轴801保持在原位。
47.在一些实施例中,电缆卷轴801的毂区部可以包括多个单独的部件。通过从上凸缘802延伸到下凸缘804的两个顶部弧形件或区部806和两个底部弧形件或区部808,毂区部可以提供圆的圆形表面,光纤电缆112可以在该圆形表面上卷绕到电缆卷轴801上。在其他示例中,更多或更少数量的顶部弧形件806和/或底部弧形件808可以形成毂区部的至少一部分。在光纤电缆112卷绕到电缆卷轴801上之后,可以移除毂区部的部分,使得光纤电缆112
可以变形,同时可能保持光纤电缆112的不变形的固定特定区部。在图8和图9的特定示例中,光纤电缆112的一小部分(例如,在曲面816附近的电缆卷轴801的顶部,如图8和图9所示)可以保持基本固定。另外,在一些实施例中,毂区部可包括固定部分或区部(图8和图9中未描绘),其可被成形为使得在没有顶部弧形件806和底部弧形件808的情况下,提供可形成光纤电缆112在其上变形的内表面的非圆形表面。在一些示例中,在变形操作之前,在电缆卷轴801被锁定到变形装置800的剩余部分中之后,顶部弧形件806和底部弧形件808可以从电缆卷轴801移除。
48.如图8和图9所示,变形装置800可包括基板812,在基板812上可以可滑动地附接有用于使光纤电缆112的束的顶部部分成形的顶部压头814和用于使束的底部部分成形的底部压头818。更具体地,顶部压头814可以提供曲面816(例如,具有对称的直边区域的局部弯曲表面),其被压靠在束的顶部(外围)部分上,并且底部压头818可以存在突起820,突起820压靠在束的底部(外围)部分上(例如,使初始的束302重新成形以产生限定狭槽306的可部署的束304,如以上结合图3所讨论的)。在图8和图9的示例中,螺杆830可以联接到顶部压头814和底部压头818,使得螺杆830的旋转(例如,通过由图8和图9中未示出的一个或更多个电马达驱动的附接的齿轮832)可以使得顶部压头814和底部压头818都压靠在缠绕在电缆卷轴801上的光纤电缆112的束上,以在没有顶部弧形件806和底部弧形件808的情况下使该束重新成形。在一些示例中,变形装置800可以被配置成使用一个压头对束的一部分进行重新成形(例如,使用顶部压头814对顶部部分重新成形),之后对剩余部分进行重新成形(例如,使用底部压头818对底部部分重新成形)。在其他示例中,变形装置800可以被配置成使光纤电缆112同时与顶部压头814和底部压头818两者接合。作为变形操作的结果,在一些实施例中,可部署的束304的部分的形状可以与突起820和曲面816的形状相匹配。
49.如图8和图9所示,顶部压头814和底部压头818中的每一个的宽度可以基本上与电缆卷轴801的在上凸缘802和下凸缘804之间的毂区部的宽度相匹配,使得顶部压头814和底部压头818可以在紧密靠近的上凸缘802和下凸缘804之间滑动,以防止光纤电缆112的任何部分进入压头814或压头818与上凸缘802或下凸缘804之间。另外,在一些实施例中,顶部压头814可以联接到上顶部防护件815和下顶部防护件817,而底部压头818可以联接到上底部防护件819和下底部防护件821。上顶部防护件815、下顶部防护件817、上底部防护件819和下底部防护件821中的每一个都可以包括与上凸缘802或下凸缘804的圆形边缘基本上匹配的弯曲区域,使得上顶部防护件815、下顶部防护件817、上底部防护件819和/或下底部防护件821可以阻止顶部压头814和底部压头818进一步前进到光纤电缆112的束中。
50.在一些实施例中,上凸缘802、毂区部和下凸缘804以及顶部压头814和底部压头818的各种表面可以被不粘表面覆盖,或者在使用之间被脱模剂或其他物质涂覆,以在变形操作之后促进顶部压头814和底部压头818从光纤电缆112退出,而不干扰光纤电缆112的新形成的形状。
51.在上述变形操作之后,在一些示例中,整个变形装置800(包括电缆卷轴801和光纤电缆112)可以被放置在烘箱中。变形装置800的基板812的尺寸可以设计成允许变形装置800安装在烘箱内。在一些实施例中,可以基于所使用的特定蜡来调节烘箱加热温度和时间,使得蜡充分熔化,使得它将光纤电缆112的层结合在一起,同时不会导致过量的蜡从光纤电缆112滴落,并且不会导致蜡向下聚集。下凸缘804可以包括小孔口,以允许多余的蜡滴
落通过,从而避免蜡在电缆卷轴801的底部过度聚集。在一些实施例中,可以以设定温度(例如,60摄氏度)使用强制通风烘箱。
52.在经历加热之后,变形装置800可以从烘箱中取出并允许冷却。上凸缘802可以包括孔口,该孔口允许空气管线被附接以加速电缆冷却过程。在冷却阶段之后,顶部压头814和底部压头818可以通过转动螺杆830而缩回。上凸缘802可以从毂区部移除,从而以可部署的束304的构型的方式暴露光纤电缆112。然后,下凸缘804可以从基板812上移除,使得可部署的束304可以被移除。
53.在围绕电力线导体101安装光纤电缆112之前,可部署的束304可以以类似的弯曲轮廓放置在光纤桶202中。在一些实施例中,光纤桶202可以包括内表面纹理,以在可部署的束304上提供一定程度的抓持。当可部署的束304被装载到光纤桶202中时,光纤桶202还可以拥有使周界在尺寸上临时增大的能力,从而改善对可部署的束304的抓持。在一些示例中,光纤桶202的内表面可以涂覆有一层粘性物质(例如,蜡),该粘性物质可以被加热以将内表面与可部署的束304的最外层轻轻结合。
54.如以上结合图1
‑
图9所讨论的,本文描述的装置和方法可以产生用于螺旋缠绕机器人系统中的无线轴光纤电缆构型或束,该无线轴光纤电缆构型或束可以拥有接近电缆束的旋转或轨道中心的质心,该质心可以与电力线导体101的中心重合。此外,在一些实施例中,所产生的电缆束可以占据围绕电力线导体101的最小半径,并且拥有最小的总长度,同时避免光纤电缆112受到小于制造商指定的弯曲半径的弯曲半径,并且同时当在小弯曲半径内连续转动光纤电缆112时使可能发生的任何光纤泵送最小化,这可以结合一些线轴系统来完成。
55.示例实施例
56.示例1:一种方法,可以包括(1)用粘性物质涂覆光纤电缆段,(2)形成该光纤电缆段的圈,(3)将圈变形为非圆形形状,所述非圆形形状在圈的外部界定狭槽,同时满足该光纤电缆段的最小弯曲半径要求,以及(4)激活粘性物质以使圈的非圆形形状稳定。
57.示例2:根据示例1的方法,其中,涂覆光纤电缆段可以在形成圈之前进行。
58.示例3:根据示例1的方法,其中,(1)粘性物质可以包括石蜡,并且(2)激活粘性物质可以包括加热圈。
59.示例4:根据示例1的方法,其中,在圈变形之前,圈可以包括圆形形状。
60.示例5:根据示例1的方法,其中,该方法可以包括在形成圈之前预扭转光纤电缆段。
61.示例6:根据示例5的方法,其中,以消除在随后围绕电力线导体缠绕光纤电缆段期间施加到光纤电缆段上的扭转的程度(rate)来执行光纤电缆段的预扭转。
62.示例7:根据示例1
‑
6中任一项的方法,其中,使圈变形可以包括向圈的周界的第一部分施加第一力以形成狭槽。
63.示例8:根据示例7的方法,其中,第一力可以使用具有狭槽形状的表面的第一压头来施加。
64.示例9:根据示例7的方法,其中,使圈变形还可以包括向圈的周界的与第一部分相对的第二部分施加第二力。
65.示例10:根据示例9的方法,其中,第二力可以使用具有不同于狭槽的形状的表面
的第二压头施加。
66.示例11:一种装置,可以包括(1)卷轴,该卷轴包括承载光纤电缆段的圈的毂区部,其中,该毂区部包括至少一个第一可移除区部,圈被承载该至少一个第一可移除区部上,(2)基座,该基座牢固地保持承载圈的卷轴,(3)第一压头,该第一压头包括面向圈的周界的第一部分的突起表面,毂区部的至少一个第一可移除区部位于该第一部分处,以及(4)便于第一压头移动到圈的周界的第一部分的机构,使得当毂区部的至少一个第一可移除区部不存在时,圈变形为非圆形形状,该非圆形形状在圈的外部界定狭槽,同时满足光纤电缆段的最小弯曲半径要求。
67.示例12:根据示例11的装置,其中狭槽拥有与突起表面匹配的形状。
68.示例13:根据示例11或示例12中任一项的装置,其中(1)卷轴还可以包括联接到毂区部的相对端的第一凸缘和第二凸缘,以及(2)第一压头的突起表面的尺寸可以设置成横跨毂区部的长度,并进入第一凸缘和第二凸缘之间。
69.示例14:根据示例13的装置,其中,该装置还可以包括联接到第一压头的第一防护件,其中,第一防护件被定位成接触第一凸缘或第二凸缘中的至少一个,以防止第一压头的突起表面进一步向圈中前进。
70.示例15:根据示例11的装置,其中该装置还可以包括至少一个螺杆,当旋转时,该螺杆将第一压头推向圈的周界的第一部分。
71.示例16:根据示例11或示例12中任一项的装置,其中(1)毂区部还可以包括至少一个第二可移除区部,圈被承载在该第二可移除区部上,(2)该装置还可以包括第二压头,该第二压头具有形状不同于狭槽的表面,其中,该机构便于第二压头移动到圈的周界的第二部分,毂区部的至少一个第二可移除区部位于圈的周界的第二部分处,并且(3)该机构可以便于第二压头移动到圈的周界的第二部分,使得当毂区部的至少一个第二可移除区部不存在时,圈被进一步变形。
72.示例17:根据示例16的装置,其中,第二部分可以与圈的周界的第一部分相对。
73.示例18:根据示例16的装置,其中,第二压头的表面形状可以包括至少一个线性部分。
74.示例19:一种方法,可以包括(1)围绕卷轴的毂区部缠绕光纤电缆段以形成圈,其中毂区部包括至少一个第一可移除区部,圈被承载在该第一可移除区部上,其中,至少一个第一可移除区部对应于圈的周界的第一部分,(2)将卷轴连接到变形装置的基座部分,(3)从卷轴的毂区部移除至少一个第一可移除区部,以及(4)朝向圈的周界的第一部分移动第一压头,使得第一压头的突起表面将圈变形为非圆形形状,该非圆形形状在圈的外部界定狭槽,同时满足光纤电缆段的最小弯曲半径要求。
75.示例20:根据示例19的方法,其中(1)毂区部可以包括至少一个第二可移除区部,圈被承载在该第二可移除区部上,(2)该至少一个第二可移除区部可以对应于圈的周界的第二部分,以及(3)该方法还可以包括(a)从卷轴的毂区部移除至少一个第二可移除区部,以及(b)朝向圈的周界的第二部分移动第二压头,使得第二压头的表面进一步使圈变形,同时满足光纤电缆段的最小弯曲半径要求。
76.在本文描述和/或示出的过程参数和步骤的顺序仅作为示例被给出,并且可以根据需要而变化。例如,虽然在本文示出和/或描述的步骤可以以特定顺序被示出或讨论,但
这些步骤不一定需要以所示出或讨论的顺序来被执行。本文描述和/或示出的各种示例性方法也可以省略本文所描述或示出的一个或更多个步骤,或者包括除了那些所公开的步骤之外的附加步骤。
77.提供前面的描述以使本领域中的其他技术人员能够最好地利用本文公开的示例性实施例的各种方面。该示例性描述并不旨在是穷尽的或受限于所公开的任何精确形式。在不脱离本公开的精神和范围的情况下,许多修改和变化是可能的。本文公开的实施例应当在所有方面被认为是说明性的而不是限制性的。在确定本公开的范围时,应当参考所附权利要求及其等同物。
78.除非另外提到,在说明书和权利要求中使用的术语“连接到”和“联接到”(及其派生词)应被解释为允许直接和间接(即,经由其他元件或部件)连接。此外,在说明书和权利要求中使用的术语“一(a)”或“一(an)”应被解释为意指“......中的至少一个”。最后,为了容易使用,在说明书和权利要求中使用的术语“包括(including)”和“具有”(及其派生词)与词语“包括(comprising)”可互换并具有与词语“包括(comprising)”相同的含义。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。