三相两电平pmsm驱动逆变器单管开路故障的容错控制方法
技术领域
1.本发明属于pmsm驱动系统容错领域,涉及一种三相两电平pmsm驱动逆变器单管开路故障的容错控制方法。
背景技术:
2.在各工业领域中,永磁同步电机及其驱动系统因其响应快、功率密度高、效率高等优点得到了广泛的应用。随着其应用场景愈发关键以及额定功率和电压等级的提高,其可靠性成为了产品设计的重要指标,提高可靠性成为了其研究领域的重要方向。尽管永磁同步电机驱动系统的拓扑随需求变化,标准的三相两电平电压原型逆变器仍是最常用的驱动器拓扑。然而,由于其结构简单,标准逆变器的容错能力相比于复杂拓扑是有限的。
3.从故障表现形式来看,逆变器中功率器件的故障可以分为开路故障与短路故障两类。由于错误的驱动信号、电气应力、热应力等原因造成的桥臂直通短路故障将对系统造成极大的危害,因此针对短路故障需要硬件设计响应快速的保护电路,或者采用加装热熔丝的方式将短路故障转换为开路故障。对于由键合线损坏、驱动芯片损坏、连接线损坏等情况造成的开路故障,不会立刻导致系统严重损害且不能触发常用的系统保护机制,但由于某一功率管或者某几个功率开路而造成的电流不平衡和转矩脉动会对作动系统造成二次损伤。
4.目前,在针对电机驱动逆变器开路故障的容错方法中,主要的容错方法仍基于逆变器或电机拓扑结构的冗余度,包括辅助桥臂,分裂电容,引出中性点,多绕组与逆变器等拓扑。这些方法虽然凭借其冗余配置可以完全容错开路故障,但一方面无法提高已投入使用的标准逆变器的可靠性,另一方面即使在设计之初采用冗余拓扑,驱动系统的功率密度也会大大降低。
技术实现要素:
5.要解决的技术问题
6.为了避免现有技术的不足之处,本发明提出一种三相两电平pmsm驱动逆变器单管开路故障的容错控制方法,提高标准pmsm驱动系统的固有容错能力。本发明能够在无辅助硬件配置的条件下显著减小转速和转矩波动的时间和幅度,可以快速地更新到已投入使用标准pmsm驱动系统中。
7.技术方案
8.一种三相两电平pmsm驱动逆变器单管开路故障的容错控制方法,其特征在于:三相两电平逆变器共有八个固有电压矢量,其中六个为有效矢量,两个为零矢量;步骤如下:
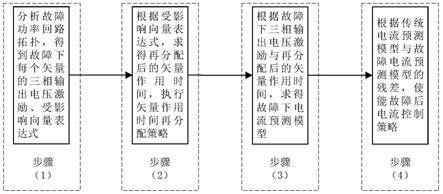
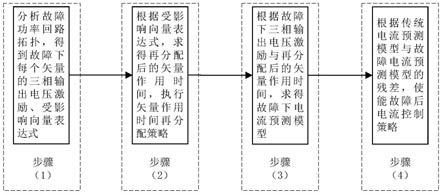
9.步骤1、建立故障状态下,三相两电平逆变器的固有电压矢量的计算公式:
10.步骤1.1:根据故障状态下的功率回路拓扑结构,得到故障状态下的每个电压矢量的逆变器输出三相电压激励
11.步骤1.2、根据得到故障状态下的电压矢量:当每种单管开路故障
下,分别有三个相邻的有效矢量受故障影响,分别为其余五个为健康矢量统一表述为
12.则在αβ坐标轴下当故障未发生时,故障相同相位的有效矢量为x为相位,v
dc
为母线电压,相邻的两个有效矢量分别为与
13.在故障发生后,三个受影响矢量的幅值和方向改变为:在故障发生后,三个受影响矢量的幅值和方向改变为:
14.对应地在svpwm的六个空间扇区中,有四个空间扇区受影响,其中两个扇区中作用的矢量均为受影响矢量,另两个扇区中作用的矢量为一个健康矢量,一个受影响矢量;
15.步骤2:根据故障发生前后受影响矢量的幅值和相位关系,在受故障影响的扇区中,实施矢量作用时间再分配策略,具体为:
16.步骤2.1:在健康矢量与受影响矢量共同作用的扇区,设在svpwm下健康矢量作用时间为t1,受影响矢量作用时间为t2,再分配后的作用时间分别为和故障发生前后每个扇区内的合成电压矢量和表述为:
[0017][0018]
使与的实部与虚部相等,则当t1>t2时得当t1<t2时得时得
[0019]
步骤2.2:在两个受影响矢量作用的扇区,设在幅值为0的受影响矢量的作用时间为t1,另一个受影响矢量作用时间为t2,再分配后的作用时间分别为和因为此时等效于零矢量,因此将其作用时间分配给幅值不为零的受影响矢量或可得
[0020]
步骤3:根据与再分配后的矢量作用时间建立故障状态下三相两电平pmsm驱动系统的电流预测模型:
[0021]
步骤3.1:根据及得到故障状态下每个开关周期产生的逆变器三相电压激励为:
[0022][0023]
其中代表扇区内第一个作用矢量的三相电压激励,
代表扇区内第二个作用矢量的三相电压激励;
[0024]
步骤3.2:采用坐标变换将变换为dq轴电压激励
[0025]
步骤3.3:以取代电流预测模型中的电压激励项,得到故障状态下电流预测模型,表述为:
[0026][0027]
其中l
d
,l
q
,r
s
,ψ
f
分别为dq轴电压,绕组电阻,转子磁链;t
s
为开关周期;为开关周期;分别为当前开关周期的电流和转速反馈;为下一开关周期的预测值;
[0028]
步骤4、基于电流预测模型实施故障后dq轴电流控制策略的使能机制:
[0029]
步骤4.1:求得传统预测模型与所提故障电流预测模型的预测残差;
[0030]
步骤4.2:当残差为0时,采用健康状态下的dq电流控制参考值;
[0031]
步骤4.3:当残差不为0时,采用故障状态下的dq电流控制参考值。
[0032]
在步骤1中得到故障电压矢量的计算公式为:
[0033][0034]
在步骤4中所述故障后dq轴电流控制策略为:
[0035][0036]
其中为电流环控制指令;θ
e
为转子位置;i
peak
为逆变器功率器件的标称连续直流电流;为传统预测模型的电流预测值。
[0037]
有益效果
[0038]
本发明提出的一种三相两电平pmsm驱动逆变器单管开路故障的容错控制方法,将由开路故障引起的电机转速和转矩波动减少90%以上。针对开路故障在各空间扇区对电压矢量的影响,提出了一种矢量作用时间再分配的策略,以在故障状态下最大程度地追踪健康状态下的参考电压矢量。由于单管开路故障发生后电流控制模式需要在故障状态与健康状态间周期性切换,为了保证故障后电流控制模式的准确切换,提出了一种使能机制。所提的使能机制基于一种新型的电流预测模型,根据所提预测模型与普通预测模型之间的残差来使能电流控制切换。不同于现有的基于冗余拓扑的容错控制方法,本发明无需增加硬件配置。如图3所示。从转速波形可见可见,所提容错方法可将转速波动减少91.7%,同时,从i
q
波形可见电机产生的电磁转矩小于负载转矩的时间也减少了92.9%
[0039]
本发明具有以下有益技术效果:
[0040]
(1)可以显著减小因逆变器开路故障引起的转矩和转速波动的时间和幅度,且所提方法可方便地嵌入到控制器中,无需辅助硬件配置;
[0041]
(2)所提容错方法中的矢量作用时间再分配策略可以在不增加故障后电流幅度的同时,进一步减小转矩和转速波动;
[0042]
(3)所提容错方法中的故障后电流控制策略可以避免故障后电流控制的误动作,且不需要设定使能阈值。
附图说明
[0043]
图1为本发明中的pmsm驱动系统逆变器开路容错控制方法示意图;
[0044]
图2为本发明实验结果波形图;
[0045]
图3为本发明实验结果波形图。
具体实施方式
[0046]
现结合实施例、附图对本发明作进一步描述:
[0047]
所描述的实施例是本发明一部分实施例,而不是全部的实施例。如图1为本发明所提容错控制方法示意图,以标准逆变器a相上桥臂开关管t1开路为例,具体实施如下:
[0048]
步骤(1)建立故障状态下,三相两电平逆变器的固有电压矢量的数学表达式:
[0049]
步骤(1.1)根据故障状态下的功率回路拓扑结构,得到故障状态下的每个电压矢量的逆变器输出三相电压激励
[0050]
步骤(1.2)根据得到故障状态下的电压矢量;
[0051]
在t1开路时,共有三个故障电压矢量,分别是
[0052][0053][0054][0055]
由可求得:可求得:
[0056]
四个受影响的空间扇区依次为:v区:健康矢量与故障矢量共同作用;vi区:与共同作用;i区:与共同作用;ii区:健康矢量与故障矢量共同作用;
[0057]
步骤(2)根据故障矢量与健康矢量之间的幅值和方向关系,在受故障影响的扇区中,实施矢量作用时间再分配策略,具体为:
[0058]
步骤(2.1)在健康矢量与故障矢量共同作用的v区与ii区,与作用时间为t1,与作用时间为t2,再分配后的作用时间分别为和当t1>t2时则时则当t1<t2时则
[0059]
步骤(2.2)在两个故障矢量共同作用的vi区与i区,作用时间为t1,与作用时间为t2,再分配后的作用时间分别为和则
[0060]
所提矢量作用时间再分配策略的效果如图2所示。可以看出,再分配策略可以避免无效矢量占用矢量作用时间,从而减少超过40%的转速波动;
[0061]
步骤(3)根据建立故障状态下三相两电平pmsm驱动系统的电流预测模型:
[0062]
步骤(3.1)根据及得到故障状态下每个开关周期产生的逆变器三相电压激励
[0063]
在t1开路时,根据步骤(1)中得到的故障矢量的三相电压激励,在v,vi,i,ii区中每个开关周期产生的三相电压激励的计算方法为:
[0064][0065]
其中,当参考电压矢量在v区时,分别为健康矢量和故障矢量的三相电压激励;
[0066]
在vi区时,分别为故障矢量和的三相电压激励;
[0067]
在i区时,分别为故障矢量和的三相电压激励;
[0068]
在ii区时,分别为健康矢量和故障矢量的三相电压激励;
[0069]
步骤(3.2)使用坐标变换将变换为dq轴电压激励
[0070]
即
[0071]
步骤(3.3)使用取代电流预测模型中的电压激励项,得到故障状态下电流预测模型;
[0072]
即
[0073]
其中l
d
,l
q
,r
s
,ψ
f
分别为dq轴电压,绕组电阻,转子磁链;t
s
为开关周期;为开关周期;
分别为当前开关周期的电流和转速反馈;为下一开关周期的预测值;
[0074]
步骤(4)基于电流预测模型实施故障后dq轴电流控制策略的使能机制:
[0075]
步骤(4.1)求得传统预测模型与所提故障电流预测模型的预测残差;
[0076]
传统预测模型表达式为:
[0077][0078]
其中为电流环的调节输出;
[0079]
步骤(4.2)当残差为0时,采用健康状态下的dq电流控制参考值;
[0080]
步骤(4.3)当残差不为0时,采用故障状态下的dq电流控制参考值;
[0081]
则故障后dq轴电流控制策略为:
[0082][0083]
其中为电流环控制指令;θ
e
为转子位置;i
peak
为逆变器功率器件的标称连续直流电流;
[0084]
在故障发生后的健康状态下,传统预测模型与所提预测模型的残差严格为0,这是因为在健康状态下两种模型有相同的电压激励;在故障发生后的故障状态下,残差立刻偏离0。因此,电流预测残差可以成为进入故障状态的有效使能标志,且避免了预设阈值的设计;
[0085]
所提容错方法的整体效果如图3所示。从转速波形可见可见,所提容错方法可将转速波动减少91.7%,同时,从i
q
波形可见电机产生的电磁转矩小于负载转矩的时间也减少了92.9%;
[0086]
实验条件:直流母线电压50v,电机的极对数为4对极,l
d
=l
q
=2.4mh,绕组电阻0.306ω,永磁体磁链0.281wb,工作转速100rpm,逆变器开关频率10khz,控制芯片为tms320f28335,逆变器所用igbt模块为fuji 7mbr25va120。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。