1.本发明公开了一种基于非线性主动悬架的自适应神经网络控制方法,属于汽车动态控制和人工智能技术领域。
背景技术:
2.汽车的操纵稳定性以及驾驶安全性是衡量其产品价值的重要指标。主动悬架系统可以根据道路的扰动信息以及车身的传感器信息输出期望的主动力,来抑制车身的俯仰以及垂向运动,从而提高驾驶安全性和稳定性。
3.主动悬架相比于被动悬架虽然有着巨大优势,但仍有一些复杂的问题需要解决。汽车的主动悬架系统是一个非线性以及不确定性系统,所以需要建立复杂的动力学模型对悬架系统进行精确评估。随着悬架系统使用时间的增加,悬架作动器内部参数也会发生变化,严重影响悬架控制效果,这需要建立先进的控制算法,即使在悬架内部参数变化时,仍可以高效的调节作动器,从而得到更好的控制效果。
技术实现要素:
4.为克服上述现有技术的不足,本发明提供了一种基于非线性主动悬架的自适应神经网络控制方法,目的在于通过神经网络模型对悬架系统的非线性以及不确定性问题进行优化,提高动力学模型的精度,并建立自适应神经网络融合算法解决悬架控制过程中作动器参数的变化以及额外的系统扰动问题。
5.本发明所要解决的问题是由以下技术方案实现的:
6.一种基于非线性主动悬架的自适应神经网络控制方法,所述方法包括:
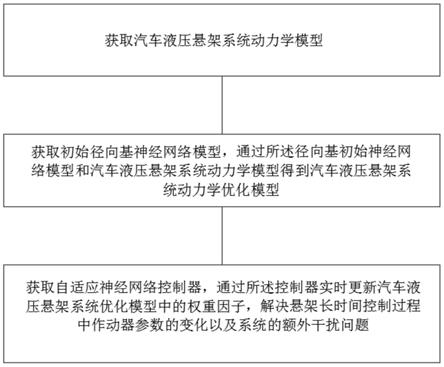
7.步骤s10,获取汽车液压悬架系统动力学模型;
8.步骤s20,获取初始径向基神经网络模型,通过所述径向基初始神经网络模型和汽车液压悬架系统动力学模型得到汽车液压悬架系统动力学优化模型;
9.步骤s30,获取自适应神经网络控制器,通过所述控制器实时更新汽车液压悬架系统优化模型中的权重因子,解决悬架长时间控制过程中作动器参数的变化以及系统的额外干扰问题。
10.优选的是,所述步骤s10的具体过程如下:
11.步骤s101,获取非线性悬架系统的四分之一模型;
12.步骤s102,获取悬架液压系统动力学模型;
13.步骤s103,通过所述非线性悬架系统的四分之一模型和悬架液压系统动力学模型得到汽车液压悬架系统动力学模型。
14.优选的是,所述步骤s20的具体过程如下:
15.步骤s201,获取原始径向基神经网模型;
16.步骤s202,分别获取第一拟合函数、第二拟合函数和第三拟合函数;
17.步骤s203,通过所述权重因子、第一拟合函数、第二拟合函数和第三拟合函数得到
初始径向基神经网络模型;
18.步骤s204,将所述初始径向基神经网络模型带入汽车液压悬架系统动力学模型中得到汽车液压悬架系统动力学优化模型。
19.优选的是,所述步骤s30的具体过程如下:
20.步骤s301,获取初始虚拟控制器和第一个李雅普诺夫函数,通过所述虚拟控制器和第一个李雅普诺夫函数得到子系统稳定的必要条件;
21.步骤s302,获取第二个李雅普诺夫函数,并提出自适应神经网络中权重因子的更新定律;
22.步骤s303,获取第三个李雅普诺夫函数,并提出液压作动器的输出控制信号,验证汽车非线性液压悬架系统的全局稳定性。
23.本发明相对于现有而言具有的有益效果:
24.本发明公开了一种基于非线性主动悬架的自适应神经网络控制方法,通过神经网络模型对悬架系统的非线性以及不确定性问题进行优化,提高动力学模型的精度,并建立自适应神经网络融合算法解决悬架控制过程中作动器参数的变化以及额外的系统扰动问题。
附图说明
25.图1是本发明一种基于非线性主动悬架的自适应神经网络控制方法的流程图。
26.图2是本发明的汽车四分之一悬架机构图。
27.图3是本发明的神经网络结构图。
28.图4是本发明的仿真障碍物结构图。
29.图5是本发明的车身垂向加速度曲线。
30.图6是本发明的车身垂向加速度曲线。
具体实施方式
31.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
33.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
34.如图1所示,本发明第一实施例在现有技术的基础上提供了一种基于非线性主动悬架的自适应神经网络控制方法,所述方法包括:
35.步骤s10,获取汽车液压悬架系统动力学模型,具体过程如下:
36.步骤s101,获取非线性悬架系统的四分之一模型,如图2所示,其动力学方程为:
[0037][0038]
其中:
[0039][0040]
公式中m
c
为车身簧上质量,m
c
为车身簧下质量,k
r
为弹簧线性刚度系数, k
nr
弹簧非线性刚度系数,c
r
为阻尼器线性阻尼系数,c
nr
为阻尼器非线性时变阻尼系数,f
yt
为液压作动器的输出力,x
r
为车身簧上质量垂向位移,x
z
为簧下质量轮胎垂向位移,x
w
为路面引起的轮胎垂向位移,f
ct
为道路激励产生的轮胎力,d
t
为系统额外扰动。
[0041]
步骤s102,获取悬架液压系统动力学模型,具体模型为:
[0042][0043]
其中:
[0044][0045]
式中c
dp
为活塞总泄漏系数,a
p
为液压缸内横截面积,p
s
为供应压力,γ
z
为油液疏密系数,v
t
为液压缸有效容积,p
l
液压缸负载压力值,u(t)为液压伺服阀系统控制信号,c
d
为伺服系统系数,为控制算子,a
d
(t)为伺服系统滑阀位移控制信号。
[0046]
步骤s103,通过所述非线性悬架系统的四分之一模型和悬架液压系统动力学模型得到汽车液压悬架系统动力学模型,具体内容包括:
[0047]
选取状态空间变量:
[0048]
x1=x
r
,x3=x
z
,x5=a
p
p
l
(t),x6=a
d
(t),并联立公式(1)
‑ꢀ
(4)得到包含液压作动器的非线性悬架系统状态空间方程:
[0049]
[0050]
其中x1为簧上质量的垂向位移,x2为簧上质量的垂向速度,为簧下质量的垂向位移,x4为簧下质量的垂向速度,x5为液压作动器的输出力,x6为伺服阀位移控制信号。
[0051]
步骤s20,获取初始径向基神经网络模型,通过所述径向基初始神经网络模型和汽车液压悬架系统动力学模型得到汽车液压悬架系统动力学优化模型,具体内容如下:
[0052]
步骤s10所建立的动力学模型存在如下问题需要解决:1.车辆悬架弹簧和阻尼器分别存在非线性刚度特性和非线性阻尼特性问题。2.车辆悬架液压作动器存在内部参数不确定性问题。3.车身传感器误差以及车辆所处的环境不断变化,导致悬架系统存在额外的系统性输入扰动。针对上述不足,本发明建立若干径向基神经网络来训练车辆悬架模型,优化整个模型的精度,达到更好的控制效果。
[0053]
步骤s201,获取原始径向基神经网模型。
[0054]
一个通常的神经网络模型包含输入层、若干中间层以及输出层,如图3所示,一个通常的神经网络拟合函数为:
[0055]
f
i
(x)=w
it
a
i
(x) b
i
, i=1,2,3,...,n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0056]
式中f
i
(x)为拟合函数,b
i
拟合截断误差,w
it
为权重因子,a
i
(x)为径向基函数向量。
[0057]
径向基函数通常选取高斯函数,具体为:
[0058][0059]
式中μ
i
高斯中心向量,ξ为高斯函数宽度。
[0060]
公式(6)中的拟合平滑函数通过如下公式评估:
[0061][0062]
权重因子w
it
可用如下公式优化,并用梯度下降法进行求解:
[0063][0064]
步骤s202,分别获取第一拟合函数、第二拟合函数和第三拟合函数。
[0065]
为了把悬架模型输入到神经网络中进行训练,首先需要选取输入层变量。针对公式(5)中存在非线性函数以及不确定性参数,建立三个拟合函数进行优化,第一个拟合函数如下:
[0066]
g1(x
a
)=
‑
k
r
m
c
‑1(x1‑
x3)
‑
k
nr
m
c
‑1(x1‑
x3)3ꢀ‑
c
nr
m
c
‑1(x2‑
x4)2‑
c
r
m
c
‑1(x2‑
x4) x5(m
c
‑1‑
1)
ꢀꢀꢀ
(10)
[0067]
其中x
a
包含状态变量x1,x2,x3,x4,x5,则第一个神经网络的输入层为五个变量,分别为簧上质量的垂向位移、簧上质量的垂向速度、为簧下质量的垂向位移、簧下质量的垂向速度,以及液压作动器的输出力。
[0068]
将公式(10)中的输入参数导入到径向基神经网络中进行训练,根据公式(8)得到第一个拟合平滑函数如下:
[0069][0070]
建立第二个拟合函数如下:
[0071][0072]
其中x
b
包含状态变量x1,x2,x3,x4,x5,则第二个神经网络的输入层为五个变量,分别为簧上质量的垂向位移、簧上质量的垂向速度、为簧下质量的垂向位移、簧下质量的垂向速度,以及液压作动器的输出力。
[0073]
将公式(12)中的输入参数导入到径向基神经网络中进行训练,根据公式(8)得到第二个拟合平滑函数如下:
[0074][0075]
建立第三个拟合函数如下:
[0076][0077]
其中x
c
包含状态变量x2,x4,x5,x6,则第三个神经网络的输入层为四个变量,分别为簧上质量的垂向速度、簧下质量的垂向速度、液压作动器的输出力,以及伺服阀位移控制信号。
[0078]
将公式(14)中的输入参数导入到径向基神经网络中进行训练,根据公式(8)得到第三个拟合平滑函数如下:
[0079][0080]
步骤s203,通过所述权重因子、第一拟合函数、第二拟合函数和第三拟合函数得到初始径向基神经网络模型。
[0081]
步骤s204,将所述初始径向基神经网络模型带入汽车液压悬架系统动力学模型中得到汽车液压悬架系统动力学优化模型。
[0082]
将优化后的函数带入到原有的悬架模型(5)中,得到优化后的悬架模型如下:
[0083][0084]
步骤s30,获取自适应神经网络控制器,通过所述控制器实时更新汽车液压悬架系统优化模型中的权重因子,解决悬架长时间控制过程中作动器参数的变化以及系统的额外干扰问题,具体内容如下:
[0085]
步骤s301,获取初始虚拟控制器和第一个李雅普诺夫函数,通过所述虚拟控制器和第一个李雅普诺夫函数得到子系统稳定的必要条件;
[0086]
为提高神经网络控制模型的鲁棒性,设计自适应神经网络控制器。为保证控制器按期望的控制信号输出,首先定义如下虚拟控制器:
[0087]
y
i
=x
i
‑
λ
i
‑1,i=1,2,3,...,n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0088]
式中λ0=x
d1
,为期望位移追踪信号,λ
i
为第n个子模型的控制函数。
[0089]
为保证上述虚拟控制器的稳定性,选取第一个李雅普诺夫函数如下:
[0090][0091]
李雅普诺夫函数的导数为:
[0092][0093]
由公式(17)得到:
[0094][0095]
根据公式(20)可知,为保证子系统稳定,需要使如下公式成立:
[0096][0097]
式中取值为的正数。
[0098]
根据公式(21)可知,λ
i
的选取是系统保持稳定的必要条件,首先对λ
i
的定义如下:
[0099][0100]
对公式(22)求偏导数:
[0101][0102]
定义的可控子变量以及不可控子变量
[0103][0104]
步骤s302,获取第二个李雅普诺夫函数,并提出自适应神经网络中权重因子的更新定律;
[0105]
选取第二个李雅普诺夫函数如下:
[0106][0107]
根据公式(17),(23),(24)得到李雅普诺夫函数的导数:
[0108][0109]
公式中,φ为选取的正定矩阵。
[0110]
选取控制子函数λ
i
如下:
[0111]
[0112]
通过神经网络训练可以得到三个拟合函数以及相应权重因子w
it
,但随着车辆使用时间的增加,优化后的悬架模型精度会进一步降低,为提高神经网络控制器的鲁棒性,定义自适应神经网络中的权重因子w
it
的更新定律如下:
[0113][0114]
式中κ
i
为选取的存在上下边界的参数。
[0115]
根据杨氏不等式理论可知:
[0116][0117]
要保证第二个李雅普诺夫函数稳定性,则如下公式需成立:
[0118][0119]
联立公式(26),(29),(30)得到:
[0120][0121]
式中d0为系统扰动的边界值,r
i
,δ
i
为反馈常数。
[0122]
步骤s303,获取第三个李雅普诺夫函数,并提出液压作动器的输出控制信号,验证汽车非线性液压悬架系统的全局稳定性。
[0123]
为了保证整个悬架系统的全局稳定性,选取第三个李雅普诺夫函数如下:
[0124][0125]
联立公式(25),(26),(32),得到李雅普诺夫函数导数为:
[0126][0127]
选取液压作动器控制信号u(t)为:
[0128][0129]
其中ψ
i
为选取的存在上下边界的时变参数,为自适应控制因子,取值时应保证如下公式成立:
[0130][0131]
将公式(28),(34)带入到公式(33)中得到:
[0132][0133]
式中
[0134]
综上所述,证明了整套控制系统是渐进稳定的。
[0135]
为证明本发明提出的悬架控制起的有效性,进行仿真分析,并于被动悬架和单独神经网络控制器比较,悬架系统的参数设置如下:车身簧上质量m
c
=1000kg,车身簧下质量m
c
=60kg,弹簧线性刚度系数k
r
=10000n/m,弹簧非线性刚度系数k
nr
=1200n/m,阻尼器线性阻尼系数c
r
=1800ns/m,阻尼器非线性时变阻尼系数c
nr
=1000ns/m,活塞总泄漏系数c
dp
=5.0x10
13
(变化值),液压缸内横截面积a
p
=5.0x102m2,供应压力p
s
=6.0x107pa,油液疏密系数γ
z
=9x108nm2,液压缸有效容积v
t
=3.46x102m3。
[0136]
仿真结果:假定车辆以低速越过如图4所示的障碍物时,记录簧上质量加速度值,曲线如图5所示:通过曲线可以说明,相比也被动悬架,基于自适应神经网络控制算法可以大幅度降低车身的垂向加速度,相比于普通的神经网路算法,也具有更好的控制效果。如图6所示车辆以高速越过障碍物时的车身质量加速度值曲线,通过曲线可以说明,即使在高速运行下,基于自适应神经网络控制算法相比与被动悬架和神经网络算法仍然具有更好的控制效果。
[0137]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。