技术特征:
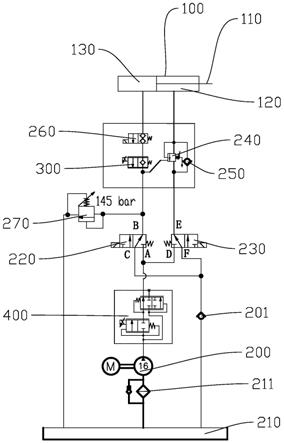
1.一种臂架自重缩回控制系统,其特征在于,包括:伸缩液压缸(100),内部设有用于举升载荷的活塞杆(110),所述活塞杆(110)将所述伸缩液压缸(100)内部分隔为有杆腔(120)与无杆腔(130);油泵(200),所述油泵(200)的进油口连接有用于储存液压油的油箱(210),所述油泵(200)的出油口与所述有杆腔(120)相连通;比例阀(300),所述比例阀(300)分别连接所述油箱(210)和所述无杆腔(130),所述比例阀(300)用于控制从所述无杆腔(130)流回所述油箱(210)的液压油的流量;传感器,用于检测所述活塞杆(110)运动速度;控制部件,用于接收所述传感器的检测结果并根据所述传感器的检测结果,依次控制所述油泵(200)的转速与所述比例阀(300)开度。2.根据权利要求1所述的一种臂架自重缩回控制系统,其特征在于:所述油泵(200)连接有第一电磁阀(220)与第二电磁阀(230),所述第一电磁阀(220)与所述第二电磁阀(230)均为两位三通电磁阀,所述第一电磁阀(220)具有第一工作油口a、第一进油口b、第一回油口c,所述第二电磁阀(230)具有第二工作油口d、第二进油口e、第二回油口f,所述第一工作油口a和所述第二工作油口d均与所述油泵(200)的出油口相连,所述第一进油口b通过所述比例阀(300)与所述无杆腔(130)相连,所述第二进油口e与所述有杆腔(120)相连,所述第一回油口c和所述第二回油口f均与所述油箱(210)相连。3.根据权利要求2所述的一种臂架自重缩回控制系统,其特征在于:所述第二进油口e与所述有杆腔(120)之间连接有第一外控溢流阀(240),所述第一外控溢流阀(240)的控制口与所述第一进油口b相连,当所述第一进油口b无压力时,所述第一外控溢流阀(240)关闭以使所述第二进油口e与所述有杆腔(120)隔断,当所述第一进油口b有压力时,所述第一外控溢流阀(240)打开以使所述第二进油口e与所述有杆腔(120)连通。4.根据权利要求3所述的一种臂架自重缩回控制系统,其特征在于:所述第二进油口e连接有第一单向阀(250),所述第一单向阀(250)远离所述第二进油口e的一端与所述有杆腔(120)相连,所述第一单向阀(250)用于防止所述有杆腔(120)中液压油通过所述第一单向阀(250)流向所述第二进油口e。5.根据权利要求2所述的一种臂架自重缩回控制系统,其特征在于:所述比例阀(300)与所述无杆腔(130)之间设有开关阀(260),所述开关阀(260)用于控制所述比例阀(300)与所述无杆腔(130)之间的通断。6.根据权利要求2所述的一种臂架自重缩回控制系统,其特征在于:所述第一进油口b连接有溢流阀(270),所述溢流阀(270)用于限制所述第一进油口b处的最高压力。7.根据权利要求2所述的一种臂架自重缩回控制系统,其特征在于:所述油泵(200)出油口与所述有杆腔(120)之间设有油压控制阀组(400),所述油压控制阀组(400)用于控制所述活塞杆(110)伸出时所述无杆腔(130)中的压力。8.根据权利要求1~7任一项所述的一种臂架自重缩回控制系统的控制方法,其特征在于,包括以下步骤:s1:所述伸缩液压缸(100)在伸出后需要缩回时,切换所述第一电磁阀(220),使所述第一进油口b与所述第一回油口c相通,切换所述第二电磁阀(230),使所述第二进油口e与所述第二工作油口d相通;
s2:启动所述油泵(200)把液压油从所述油箱(210)输送到所述油压控制阀组(400),调节压力后输送到所述第二电磁阀(230)的所述第二工作油口d,液压油流过所述第二电磁阀(230)并从所述第二进油口e流经所述第一单向阀(250)从而进入所述有杆腔(120),液压油在所述有杆腔(120)中推动所述活塞杆(110)运动,所述无杆腔(130)中液压油被压缩,打开所述比例阀(300)和所述开关阀(260),所述无杆腔(130)中的液压油流经所述比例阀(300)和所述开关阀(260)并回流至所述油箱(210);s3:使用所述传感器检测所述活塞杆(110)运动速度,并将检测结果传输至所述控制部件;s4:所述控制部件根据所述传感器的检测结果,控制所述油泵(200)的转速与所述比例阀(300)开度。9.根据权利要求8所述的控制方法,其特征在于:所述步骤s4中,当所述控制部件接收到的所述传感器的检测结果大于预制设定的安全数值时,降低所述油泵(200)转速直到所述油泵(200)的转速等于零,则切换所述第二电磁阀(230),使所述第二进油口e与所述第二回油口f相通,然后降低所述比例阀(300)开度。10.根据权利要求9所述的控制方法,其特征在于:所述步骤s4中,当所述控制部件接收到的所述传感器的检测结果小于预制设定的安全数值时,所述控制部件将检测所述比例阀(300)开度,若所述比例阀(300)开度未全开,则增加所述比例阀(300)开度;若所述比例阀(300)开度已经全开,则增加所述油泵(200)的转速并切换所述第二电磁阀(230)使所述第二进油口e与所述第二工作油口d相通。
技术总结
本发明公开了一种臂架自重缩回控制系统,包括:伸缩液压缸、油泵、比例阀、传感器、控制部件,伸缩液压缸内部设有用于举升载荷的活塞杆,活塞杆将伸缩液压缸内部分隔为有杆腔与无杆腔;油泵的进油口连接有用于储存液压油的油箱,油泵的出油口与有杆腔相连;比例阀分别连接油箱和无杆腔,比例阀用于控制从无杆腔流入油箱的液压油的流量;传感器用于检测活塞杆运动速度;控制部件用于接收传感器的检测结果并根据传感器的检测结果,依次控制油泵的转速与比例阀开度。本发明提供的一种臂架自重缩回控制系统,在活塞杆缩回的工作状态下,依靠载荷的重力辅助将活塞杆缩回,有效的减少油泵的能量消耗。量消耗。量消耗。
技术研发人员:刘国良 石伟 赵俊波 邹俊辉
受保护的技术使用者:湖南星邦智能装备股份有限公司
技术研发日:2021.09.22
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。