1.本发明属于升降机技术领域,涉及一种平层锁紧机构,具体涉及一种升降机电磁夹紧机构及其控制方法。
技术背景
2.升降机的发展正在处于一个高峰状态。大多数厂家或者个人为了提高场地的利用率,更多的选择了多层建筑,由此也需要一种装置来方便上下提升下降货物。由于普通电梯造价高,承载力较低,不适合装载几十吨或者几百吨的货物,所以开发出了高承载力的液压升降机来辅助生产和货物运输。升降机既安全又具有超大的负载能力,而且维修方便,使得这一特殊产业有的更快的发展。
3.升降机的平层装置,一般是磁开关、光电感应开关等与干簧管组合使用,结合采用一定算法编辑的控制系统和软件,来达到稳定平层的目的。但是,在升降机停在预先确定的位置停下后,如果有较重的货物或大波的乘客进出轿厢,那么吊着轿厢的钢丝绳因为轿厢整体重量的大幅度改变,而产生较为明显的上下抖动或波动。从而使货物或乘客在进出轿厢的过程中,出现轿厢内表面与楼层表面之间的高度差变大的问题。这种抖动或波动不会让绝大多数乘客产生不适,但是,可能会使进出轿厢的拉着货物的推车等出现卡顿、颠簸等情况。如果进出的是承载了较重、怕摔的货物的自动控制的搬运器,那么可能出现搬运器被卡在电梯口无法进入、货物重心偏移、货物受到颠簸碎裂等问题。
4.限位器是升降机中重要的安全装置,避免升降机在作业时快速的上升或快速的降落,保障了作业安全。目前,升降机采用的限位器主要有围栏门限位、吊笼门限位、顶门限位、极限位开关、上下限位开关、对重防断绳保护开关等。现有的升降稳定机构主要采用接近开关直接切断电源,控制电机停止的方式实现。但是,这些限位器也只是让升降机停止了大幅度的上下运动,也不能避免,在升降机停止上升或下降后,因较重的货物或大波乘客进出轿厢而产生的抖动或振动。
5.现有文献中已经出现了使用泊车机器人搬运轿车等车辆进出升降机,实现在多层建筑中自动存车和取车的目的。但是,泊车机器人需要全部或部分伸入到车底,通常采用直径较小的轮子,而搬运的车辆重量多数为2
‑
5吨重。泊车机器人在搬运车辆时,不适合过坎和跨沟,当坎的高度较大、沟的宽度较大时,泊车机器人的轮子很容易就卡住无法行动,被搬运的车辆很可能会偏移或受到颠簸。
技术实现要素:
6.鉴于现有技术中存在上述技术问题,本发明的目的为提供一种电磁夹紧机构及其控制方法,当升降机停在确定的楼层位置后,能够将升降机的轿厢夹紧,固定在该位置,以解决较重货物或大波乘客进出轿厢引起的抖动问题。
7.本发明采用的技术方案如下所述:
8.一种升降机电磁夹紧机构,所述升降机电磁夹紧机构1包括固定部分和活动部分。
所述固定部分包括吸附板2,所述吸附板2固定在升降机轿厢13侧面对应的框架14,其上开设有限位孔3。所述活动部分固定安装在升降机轿厢13的侧面,包括一个支架4,所述支架4包括相互平行的前连接板5和后连接板6,以及多个用于固定连接前连接板5和后连接板6的连接杆7。所述活动部分包括位于支架4内部且可活动的片状的磁铁固定座8,所述磁铁固定座8面向后连接板6的一侧设有第一电磁铁9,所述磁铁固定座8面向前连接板5的一侧设有第二电磁铁10和与限位孔3的形状相适应的限位块11,并且前连接板5上设有可以容纳第二电磁铁10和限位块11的开孔。
9.进一步的,所述后连接板6的外侧设有用于确定安装位置的定位柱12。
10.进一步的,在每个升降机轿厢需要停住的位置都需要安装所述吸附板2。这样,升降机轿厢13就能够在每个需要停住的位置都能够被夹紧,防止较重货物或大波乘客进出轿厢引起的抖动。
11.进一步的,一个升降机轿厢13上可以安装多个所述电磁夹紧机构1。安装的电磁夹紧机构1的数量越多,对升降机轿厢13的夹紧效果越明显,且承重越大。
12.进一步的,一个升降机轿厢13上的多个电磁夹紧机构1最好对称安装。
13.上述升降机电磁夹紧机构中,包括两个电磁铁,及第一电磁铁9和第二电磁铁10,这两块电磁铁是让电磁夹紧机构达到固定轿厢目的的重要部件。当第一电磁铁9通电而第二电磁铁10断电时,磁铁固定座8及其负载的其他部件在第一电磁铁9的磁力作用下,被吸附在后连接板6上,即靠近升降机轿厢13。第二电磁铁10和限位块11也跟着靠近升降机轿厢13,远离固定在升降机轿厢13侧面对应的框架14上的吸附板2,从而使限位块11从吸附板2的限位孔3中脱出。此时,升降机轿厢13可以自由升高和降低。当第一电磁铁9断电而第二电磁铁10通电时,磁铁固定座8及其负载的其他部件在第二电磁铁10的磁力作用下,被吸附在前连接板5上,即远离升降机轿厢13。第二电磁铁10和限位块11也跟着远离升降机轿厢13,靠近固定在升降机轿厢13侧面对应的框架14上的吸附板2,从而使限位块11插入吸附板2的限位孔3中。此时,因为限位块11的限位效果,使得升降机轿厢13被固定在现在的位置,无法发生上下移动,从而最大程度的避免较重货物或大波乘客进出轿厢引起的抖动。
14.本发明还提供上述升降机电磁夹紧机构的控制方法,所述控制方法包括:
15.在升降机轿厢停在某一层对应的位置上后,立刻控制第一电磁铁断电,同时第二电磁铁通电;
16.在升降机轿厢即将升高或降低时,先控制第一电磁铁通电,同时第二电磁铁断电,后控制升降机轿厢升高或降低。
17.进一步的,上述控制方法还包括:在升降机轿厢停在某一层对应的位置上后,先控制第一电磁铁断电,同时第二电磁铁通电,后打开升降机轿厢门;
18.在升降机轿厢即将升高或降低时,先关闭升降机轿厢门,再控制第一电磁铁通电,同时第二电磁铁断电,最后控制升降机轿厢升高或降低。
19.本发明具有如下有益效果;
20.1、所述升降机电磁夹紧机构结构简单,安装方便,夹紧效果明显;
21.2、安装上述电磁夹紧机构的升降机,在启动电磁夹紧机构后,在多个限位块和限位孔的配合下,能够牢牢的固定住,当有较重的货物或大波乘客进出轿厢时,不会因轿厢重量的变化而发生抖动,使轿厢内表面与层地面之间产生较大高度差,而使装载有较重货物
的轮子较小的自动化搬运器卡住;
22.3、所述升降机夹紧机构采用电磁铁,能够自动化控制。
附图说明
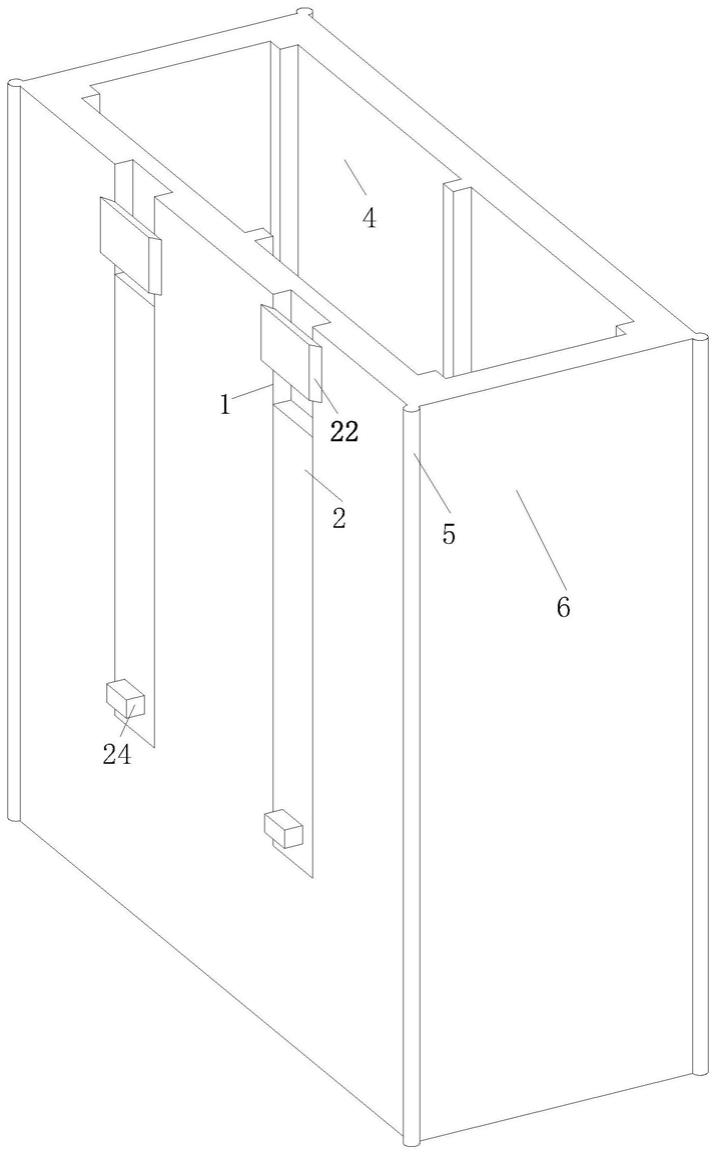
23.图1为本发明实施例中电磁夹紧机构安装位置示意图;
24.图2为本发明实施例中吸附板的结构示意图;
25.图3为本发明实施例中磁铁固定座的结构示意图;
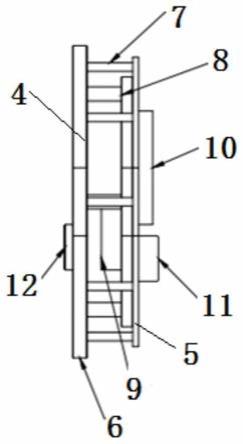
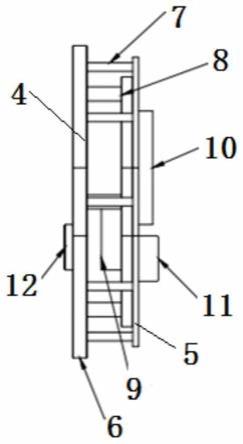
26.图4为本发明实施例中电磁夹紧机构限位状态的结构示意图;
27.图5为本发明实施例中电磁夹紧机构限位状态的立体图;
28.图6为本发明实施例中电磁夹紧机构收回状态的结构示意图;
29.图7为本发明实施例中电磁夹紧机构收回状态的立体图;
30.其中,1为电磁夹紧机构,2为吸附板,3为限位孔,4为支架,5为前连接板,6为后连接板,7为连接杆,8为磁铁固定座,9为第一电磁铁,10为第二电磁铁,11为限位块,12为定位柱,13为升降机轿厢,14为框架。
具体实施方式
31.为了更清楚地说明本发明的技术方案,下面结合具体实施例和附图进行说明,显而易见地,下面描述中的实施例仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些实施例获得其他的实例。
32.实施例1
33.本实施例包括一个安装在升降机上的电磁夹紧机构1。如图1
‑
4所示,所述升降机电磁夹紧机构1包括固定部分和活动部分。所述固定部分包括吸附板2,所述吸附板2固定在升降机轿厢13侧面对应的框架14,其上开设有限位孔3。所述活动部分固定安装在升降机轿厢13的侧面,包括一个支架4,所述支架4包括相互平行的前连接板5和后连接板6,以及多个用于固定连接前连接板5和后连接板6的连接杆7。所述活动部分包括位于支架4内部且可活动的片状的磁铁固定座8,所述磁铁固定座8面向后连接板6的一侧设有第一电磁铁9,所述磁铁固定座8面向前连接板5的一侧设有第二电磁铁10和与限位孔3的形状相适应的限位块11,并且前连接板5上设有可以容纳第二电磁铁10和限位块11的开孔。所述后连接板6的外侧设有用于确定安装位置的定位柱12。
34.所述升降机轿厢13上安装16个所述电磁夹紧机构1,两侧对称的各安装了8个所述电磁夹紧机构1。
35.所述升降机电磁夹紧机构工作原理为:在需要使用电磁夹紧机构1时第二电磁铁10通电且第一电磁铁断电9,使第二电磁铁10向前连接板5移动吸附到吸附板2上,连带着限位块11也向前连接板5移动,限位块11卡在吸附板2的限位孔3当中,实现平层锁紧的功能,即限位状态,如图4
‑
5所示。当升降机轿厢13需要上下移动时,第二电磁铁10断电且第一电磁铁9通电,使第一电磁铁9移动并吸附到后连接板6上,同时带动限位块11也移动吸附到后连接板6上,使限位块11从吸附板2的限位孔3当中抽出,实现解除平层锁紧状态,即收回状态如图6
‑
7所示。
36.上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此
项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所做的任何等效变化或修饰,均应落入本发明的保护范围之内。本发明未涉及部分与现有技术相同或可采用现有技术加以实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。