1.本发明涉及一种电梯安全技术领域,尤其设计电梯运行轿门锁紧技术。
背景技术:
2.根据国标,在一些特定情况,电梯的运行应自动地取决于轿门的锁紧。在垂直电梯门系统安全电路中,电梯门关闭时,需要一种轿门锁装置使门系统锁紧,以防止门板的意外打开。该轿门锁装置的锁紧应由符合一定要求的电气安全装置来证实。因此在一些特定情况,轿门锁装置需要搭配电气开关,然而该开关在轿门锁钩等外部机械抖动的情况下大部分容易接触不良,且目前市场上大部分机械轿门锁的开关触点是分离式的,即开关触点安装于轿门锁钩随锁钩移动,导致开关本体固定,防护等级无法做到更高,无法满足一些特殊工况,例如潮湿、爆炸性环境等。
技术实现要素:
3.本发明的目的在于提供一种轿门锁装置,以解决现有技术中电气开关易受外界因素影响导致接触不良、难以在潮湿、爆炸性等环境实行安全应用的问题。
4.为了达到上述目的本发明采用如下技术方案:
5.一种轿门锁装置,包括安装在轿门导轨架上的锁座、安装在轿门门吊板上的门系合装置,所述门系合装置上设置有与所述锁座匹配的锁钩,
6.包括与锁钩配合动作的安装在轿门导轨架上的转臂式开关;
7.所述转臂式开关包括电气安全装置的开关触点、触臂、与触臂连接的转臂模块,所述开关触点包括静触点和动触点,所述动触点设置在触臂上;触臂和转臂模块同步运动;
8.所述锁钩的钩部连接有与所述转臂模块匹配的推杆;
9.开门/关门时推杆随锁钩动作,通过推杆作用于转臂模块使触臂发生摆动实现静触点和动触点分离/接合,以判断轿门是否锁紧。
10.进一步地,所述触臂通过第一转动轴连接在轿门导轨架上,所述第一转动轴低于所述静触点但不位于静触点的正下方。
11.进一步地,所述转臂模块包括与第一转动轴连接的转臂、转动连接在转臂下端的与推杆匹配的转臂滚轮。
12.进一步地,所述转臂、第一转动轴与所述触臂为一体成型。
13.进一步地,所述转臂整体呈l型,转臂滚轮连接在转臂的横臂末端;所述推杆呈钩状,包括相对设置的靠近锁钩的第一接触面和远离锁钩的第二接触面,第一接触面和第二接触面之间的距离大于转臂滚轮的直径。
14.进一步地,关门状态时,所述转臂滚轮位于第一接触面和第二接触面之间的卡口内,第一接触面抵住转臂滚轮,转臂所在的位置为关门极限位,所述锁座与锁钩的钩部啮合的锁孔长度大于第二接触面与转臂滚轮的间隙,
15.开门状态时,所述锁钩脱离锁座,推杆脱离转臂滚轮,转臂所在的位置为开门极限
位;静触点与动触点刚好接合时转臂所在的位置为转臂式开关接通临界位;
16.转臂处于转臂式开关接通临界位到其关门极限位的区间时,动触点与静触点接合;转臂处于转臂式开关接通临界位到其开门极限位的区间时,动触点与静触点分离。
17.进一步地,所述转臂模块包括与第一转动轴连接的第一摆动臂、与第一转动轴连接的第二摆动臂、转臂、安装底座、转动连接在转臂下端的与推杆匹配的转臂滚轮。
18.进一步地,所述第一摆动臂、第二摆动臂、触臂、第一转动轴为一体成型。
19.进一步地,所述转臂整体呈l型;所述安装底座安装在轿门导轨架上,所述转臂的竖臂通过转臂连接轴转动连接在所述安装底座上;所述转臂滚轮连接在转臂的横臂末端;
20.所述推杆呈钩状,包括相对设置的靠近锁钩的第一接触面和远离锁钩的第二接触面,第一接触面和第二接触面之间的距离大于转臂滚轮的直径,
21.所述第一摆动臂和第二摆动臂夹角为钝角,第一摆动臂在上方,第二摆动臂在下方,第一摆动臂和第二摆动臂末端均连接有摆动臂滚轮,转臂连接轴的高度位于第一摆动臂的摆动臂滚轮和第二摆动臂的摆动臂滚轮之间。
22.进一步地,关门状态时,所述转臂滚轮位于第一接触面和第二接触面之间的卡口内;第一接触面抵住转臂滚轮,所述锁座与锁钩啮合的锁孔长度大于第二接触面与转臂滚轮的间隙,转臂的竖臂往第一摆动臂方向倾压,作用于第一摆动臂的摆动臂滚轮,使动触点与静触点接合;
23.开门状态时,所述锁钩脱离锁座,推杆脱离转臂滚轮,转臂的竖臂作用于第二摆动臂的摆动臂滚轮,使动触点与静触点分离。
24.进一步地,所述门系合装置包括安装板以及设置在所述安装板上的右门刀,右门刀在轿厢平层时对应于层门静滚轮和层门动滚轮的靠近锁钩的一侧;
25.所述右门刀两端均设有第一连杆,右门刀两端的第一连杆相互平行,第一连杆一端通过轴承连接在安装板上,其另一端通过轴承连接在右门刀上,关门状态时,第一连杆自连接在安装板上的一端往其另一端向下倾斜,平层开门过程中,右门刀受层门动滚轮挤压往锁钩方向运动,使锁钩转动钩部抬起脱离锁座。
26.进一步地,所述锁钩通过锁钩连接轴连接在所述安装板上,锁钩的长臂设有与锁座啮合的钩部,锁钩的短臂的下部通过挤压滚动件连接轴连接有挤压滚动件,钩部啮合在锁座时,所述挤压滚动件所处的高度比锁钩连接轴低,所述挤压滚动件与所述右门刀相接,开门时,右门刀受层门动滚轮挤压往钩部方向运动时,挤压滚动件被右门刀挤压而转动,同时锁钩的短臂向下转动,锁钩围绕锁钩连接轴转动锁钩抬起,脱离锁座,静触点与动触点分离。
27.进一步地,所述挤压滚动件采用轴承或滚轮。
28.进一步地,所述转臂式开关还包括触臂缓冲弹性件,触臂缓冲弹性件的一端连接在静触点下方区域,其另一端连接在触臂上,关门状态时,触臂缓冲弹性件处于压缩状态。
29.进一步地,还设有保护壳,覆盖保护动触点、静触点、触臂、触臂缓冲弹性件。
30.本发明的优点包括:
31.1、转臂式开关安装在轿门导轨架上,可以采用外壳对其进行防护,适用于更恶劣的工况环境,比如潮湿、易燃易爆环境;
32.2、关门状态时,转臂处于转臂式开关接通临界位到其关门极限位的区间时,动触
点与静触点接合;开门状态时,所述锁钩脱离锁座,推杆脱离转臂滚轮,转臂处于转臂式开关接通临界位到其开门极限位的区间时,动触点与静触点分离,可见转臂式开关具有较强的抗振动、抗冲击性能。
附图说明
33.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,并不构成对本发明的不当限定,在附图中:
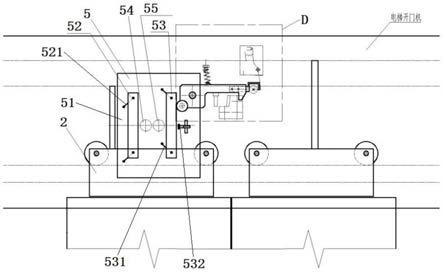
34.图1是实施例一关门状态结构示意图;
35.图2是实施例一关门状态转臂式开关及锁钩啮合锁座的结构示意图;
36.图3是挤压滚动件安装结构侧面示意图;
37.图4是实施例一转臂式开关结构示意图;
38.图5是触臂、第一转动轴、转臂安装结构侧面示意图;
39.图6是实施例一开门状态结构示意图;
40.图7是实施例二关门状态转臂式开关及锁钩啮合锁座的结构示意图;
41.图8是实施例二转臂式开关结构示意图。
42.锁座1,轿门门吊板2,锁钩3,钩部31,推杆32,第一接触面321,第二接触面322,锁钩连接轴33,挤压滚动件34,挤压滚动件连接轴341,锁钩缓冲弹性件35,锁钩限位件36,转臂式开关4,触臂41,动触点411,触臂缓冲弹性件412,静触点42,第一转动轴43,转臂44,转臂滚轮45,第一摆动臂46,关门触点461,第二摆动臂47,开门接触点471,安装底座48,转臂连接轴49,门系合装置5,安装板51,左门刀52,第二连杆521,右门刀53,第一连杆531,右门刀限位件532,层门静滚轮54,层门动滚轮55,保护壳6。
具体实施方式
43.下面将结合附图以及具体实施例来详细说明本发明,在此以本发明的示意性实施例及说明用来解释本发明,但并不作为对本发明的限定。
44.本说明书中涉及左、右、上、下、高、低、逆时针、顺时针等等方向描述是以图1的视角作参考的。
45.实施例一
46.如图1
‑
6所示,一种轿门锁装置,包括安装在轿门导轨架上的锁座1、安装在轿门门吊板2上的门系合装置,所述门系合装置上设置有与所述锁座1匹配的锁钩3,
47.包括与锁钩3配合动作的安装在轿门导轨架上的转臂式开关4;
48.所述转臂式开关4包括电气安全装置的开关触点、触臂41、与触臂41连接的转臂模块,所述开关触点包括静触点42和动触点411,所述动触点411设置在触臂41上,触臂41和转臂模块同步运动;
49.所述锁钩3的钩部31连接有与所述转臂模块匹配的推杆32;
50.开门/关门时推杆32随锁钩3动作,通过推杆32作用于转臂模块使触臂41发生摆动实现静触点42和动触点411分离/接合,以判断轿门是否锁紧。
51.所述触臂41通过第一转动轴43连接在轿门导轨架上,所述第一转动轴43低于所述静触点42但不位于静触点42的正下方。
52.所述转臂模块包括与第一转动轴43连接的转臂44、转动连接在转臂44下端的与推杆32匹配的转臂滚轮45;
53.当然,本领域技术人员可以设置所述转臂44、第一转动轴43与所述触臂41为一体成型。
54.所述转臂44整体呈l型,转臂滚轮45连接在转臂44的横臂末端;所述推杆32呈钩状,包括相对设置的靠近锁钩3的第一接触面321和远离锁钩3的第二接触面322,第一接触面321和第二接触面322之间的距离大于转臂滚轮45的直径。
55.关门状态时,所述转臂滚轮45位于第一接触面321和第二接触面322之间的卡口内,第一接触面321抵住转臂滚轮45,转臂44所在的位置为关门极限位,关门极限位如图4的辅助线a所示,所述锁座1与锁钩3的钩部31啮合的锁孔长度大于第二接触面322与转臂滚轮45的间隙,
56.开门状态时,所述锁钩3脱离锁座1,推杆32脱离转臂滚轮45,转臂44所在的位置为开门极限位,开门极限位如图4的辅助线b所示;静触点42与动触点411刚好接合时转臂44所在的位置为转臂式开关接通临界位,转臂式开关接通临界位如图4的辅助线c所示;
57.转臂44处于转臂式开关接通临界位到其关门极限位的区间时,动触点411与静触点42接合;转臂44处于转臂式开关接通临界位到其开门极限位的区间时,动触点411与静触点42分离。
58.所述门系合装置5包括安装板51以及设置在所述安装板51上的相互平行的左门刀52、右门刀53,左门刀52和右门刀53在轿厢平层时分别对应于层门静滚轮54和层门动滚轮55的左侧(远离锁钩的一侧)、右侧(靠近锁钩的一侧);
59.所述右门刀53两端均设有第一连杆531,右门刀53两端的第一连杆531相互平行,第一连杆531一端通过轴承连接在安装板51上,其另一端通过轴承连接在右门刀53上,关门状态时,第一连杆531自连接在安装板51上的一端往其另一端向下倾斜,平层开门过程中,右门刀53受层门动滚轮55挤压往锁钩3方向运动,使锁钩3转动钩部抬起脱离锁座1;
60.所述左门刀52两端均设有第二连杆521,左门刀52两端的第二连杆521相互平行,第二连杆521一端通过轴承连接在安装板51上,其另一端通过轴承连接在左门刀52上,第二连杆521自连接在左门刀52上的一端往其另一端向下倾斜。
61.所述锁钩3通过锁钩连接轴33连接在所述安装板51上,锁钩3的长臂设有与锁座1啮合的钩部31,锁钩3的短臂的下部通过挤压滚动件连接轴341连接有挤压滚动件34,钩部31啮合在锁座1时,所述挤压滚动件34所处的高度比锁钩连接轴33低,所述挤压滚动件34与所述右门刀53相接,开门时,右门刀53受层门动滚轮55挤压往钩部31方向运动时,挤压滚动件34被右门刀53挤压而转动,同时锁钩3围绕锁钩连接轴33转动,锁钩3的短臂向下转动,锁钩3的钩部31往上提起,脱离锁座1,静触点42与动触点411分离。
62.所述挤压滚动件34可以采用轴承或滚轮。
63.所述挤压滚动件34下方设有右门刀限位件532,限制右门刀53移动幅度。
64.所述锁钩3上边缘连接有锁钩缓冲弹性件35,锁钩缓冲弹性件35的另一端连接在轿门导轨架上,锁钩3下方设有锁钩限位件36。
65.所述转臂式开关4还包括触臂缓冲弹性件412,触臂缓冲弹性件412的一端连接在静触点42下方区域,其另一端连接在触臂41上,关门状态时,触臂缓冲弹性件412处于压缩
状态。
66.还设有保护壳6,覆盖保护动触点411、静触点42、触臂41、触臂缓冲弹性件412。
67.锁钩缓冲弹性件35和触臂缓冲弹性件412可以采用弹簧或橡胶弹性件以及其他可实现相同功能的弹性件。
68.本发明的工作原理是:
69.如图4所示,为更清晰说明转臂式开关4的工作过程,图4中添加如下辅助线:轿门系统完全关闭时,转臂44所在位置为辅助线a所示;轿门系统完全开启即锁钩3脱离锁座1时,转臂44所在位置为辅助线b所示;以及转臂44转动时使开关刚好接通时的位置如辅助线c所示,辅助线b和辅助线a夹角为转动角度x,转动角度x对应的转臂滚轮45水平行程为l1,辅助线c与辅助线a之间的夹角称为接通角度y,转臂44在接通角度y时转臂式开关4均为接通状态,接通角度y对应的转臂滚轮45接通行程为l2,换言之,转臂44在接通角度y任意地摆动转臂式开关4均为接通状态,如果轿门锁钩3发生振动、冲击从而导致转臂44摆动,那么转臂式开关4的抗振动、抗冲击性能可以量化地表示为:
[0070][0071]
只要振动、冲击引起的转臂44摆动的幅度小于接通角度y或者振动、冲击引起推杆32水平位移值小于转臂滚轮45接通行程l2,那么转臂式开关4就不会断开。另外转臂滚轮45水平行程l1、转臂滚轮45接通行程l2根据轿门锁工况而定,且l1、l2决定了转臂44半径,在转动角度x不变时,接通角度越大,转臂滚轮45接通行程l2就越大,抗振动、冲击性能就越好。
[0072]
如图2、4所示,当电梯门系统正在关门时,锁钩3与锁座1啮合到位,在此过程中,轿门锁钩3先由抬起状态转变为水平状态,推杆32先随锁钩3平稳地由抬起状态转变为水平状态,与转臂滚轮45啮合,即转臂滚轮45进入到第一接触面321、第二接触面322之间的卡口,然后轿门锁钩3再向关门方向平移一段距离后轿门系统完全关闭,推杆32也水平往关门方向推着转臂滚轮45,这时,转臂44旋转直到辅助线a所示位置时,开关完全闭合,此时轿门也完全关闭。
[0073]
如图4、6所示,当轿厢平层,电梯门系统正在开门,门系合装置上的右门刀53在往开门方向移动一定距离后受层门动滚轮55挤压,往锁钩3方向移动,使挤压滚动件34转动,同时锁钩3的短臂向下转动(逆时针转动),锁钩3的钩部31抬起与锁座1脱离,此过程中,转臂44随推杆32移动、抬起而顺时针旋转直到辅助线b所示位置,转臂式开关4的静触点42与动触点411完全断开。特别地,在转臂式开关4的静触点42和动触点411因异常发生粘连无法正常分离时,因为转臂44与触臂41刚性地连接为一体,转臂44无法转动,此时,因为推杆32随锁钩3水平移动一段距离(锁孔长度)后才抬起,而这一段距离远大于推杆32第二接触面322与转臂滚轮45的间隙,因此推杆32在未抬起之前,第二接触面322触碰转臂滚轮45使转臂44可以强制顺时针旋转,从而使静触点42与动触点411分离,直至锁钩3与锁座1完全脱离啮合,此时推杆32的第一、二接触面与转臂滚轮45也脱离啮合,轿门可以正常开启。
[0074]
实施例二
[0075]
本实施例与实施例一不同的是转臂模块。如图7
‑
8所示,本实施例的转臂模块具体如下:
[0076]
所述转臂模块包括与第一转动轴43连接的第一摆动臂46、与第一转动轴43连接的第二摆动臂47、转臂44、安装底座48、转动连接在转臂44下端的与推杆32匹配的转臂滚轮45;
[0077]
本领域技术人员可以设置所述第一摆动臂46、第二摆动臂47、触臂41、第一转动轴43为一体成型。
[0078]
所述转臂44整体呈l型;所述安装底座48安装在轿门导轨架上,所述转臂44的竖臂通过转臂连接轴49转动连接在所述安装底座48上;所述转臂滚轮45连接在转臂44的横臂末端;
[0079]
所述推杆32呈钩状,包括相对设置的靠近锁钩3的第一接触面321和远离锁钩3的第二接触面322,第一接触面321和第二接触面322之间的距离大于转臂滚轮45的直径,
[0080]
所述第一摆动臂46和第二摆动臂47夹角为钝角,第一摆动臂46在上方,第二摆动臂47在下方,第一摆动臂46和第二摆动臂47末端均连接有摆动臂滚轮,转臂连接轴49的高度位于第一摆动臂46的摆动臂滚轮和第二摆动臂47的摆动臂滚轮之间。
[0081]
关门状态时,所述转臂滚轮45位于第一接触面321和第二接触面322之间的卡口内;第一接触面321抵住转臂滚轮45,所述锁座1与锁钩3啮合的锁孔长度大于第二接触面322与转臂滚轮45的间隙,转臂44的竖臂往第一摆动臂46方向倾压,作用于第一摆动臂46的摆动臂滚轮,使动触点411与静触点42接合;
[0082]
开门状态时,所述锁钩3脱离锁座1,推杆32脱离转臂滚轮45,转臂44的竖臂作用于第二摆动臂47的摆动臂滚轮,使动触点411与静触点42分离。
[0083]
详细地,本实施例的工作原理是:
[0084]
当电梯门系统正在关门时,锁钩3的钩部31与锁座1啮合到位,在此过程中,轿门锁钩3先由抬起状态转变为水平状态,推杆32先随锁钩3平稳地由抬起状态转变为水平状态,与转臂滚轮45啮合,即转臂滚轮45进入到第一接触面321、第二接触面322之间的卡口,然后轿门锁钩3再向关门方向平移一段距离后轿门系统完全关闭;第一接触面321抵住转臂滚轮45,所述锁座1与锁钩3啮合的锁孔长度大于第二接触面322与转臂滚轮45的间隙,推杆32也水平往关门方向推着转臂滚轮45,这时,转臂44逆时针旋转,其竖臂作用于第一摆动臂46的摆动臂滚轮的关门接触点461上,使动触点411与静触点42接合;
[0085]
当电梯门系统正在开门时,门系合装置上的右门刀53在往开门方向移动一定距离后受层门动滚轮55挤压,往锁钩3方向移动,推动锁钩3的挤压滚动件34转动,同时锁钩3的短臂向下运动(逆时针旋转),锁钩3抬起与锁座1脱离,推杆32的第一、二接触面与转臂滚轮45也脱离啮合,此过程中,转臂44随推杆32移动、抬起而顺时针旋转,转臂44的竖臂作用于第二摆动臂47的摆动臂滚轮的开门接触点471上,使动触点411与静触点42分离,轿门可以正常开启。
[0086]
本发明的优点包括:能够采用外壳保护方式把转臂式开关进行封闭保护,适用于潮湿、易燃易爆环境等恶劣的工况;提高防护级别;能够提高抗振动、抗冲击性能,大大提高开关触点的接触稳定性,避免了转臂式开关的意外断开导致门系统安全回路断开使电梯意外停止的情况出现,提高电梯门系统的安全可靠性。
[0087]
以上对本发明实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本发明实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本
发明实施例的原理;同时,对于本领域的一般技术人员,依据本发明实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。