fac自动耦合封装方法
技术领域
1.本发明涉及半导体激光器技术领域,特别涉及一种fac自动耦合封装设备。
背景技术:
2.半导体激光器具有体积小,重量轻,效率高,寿命长等诸多有点,其在国民经济的各方面起着越来越重要的作用;随着实际工程的发展,对于半导体激光器的输出功率要求越来越高,因此半导体激光器中各个光学元件的配合与封装起到尤为关键的作用;
3.快轴准直镜(fac)是高功率半导体激光系统中最为重要的透镜之一,其作为激光器芯片的第一个光学元件,如果光束聚焦不好、轻斜、拖尾,后续光路很难或不可能到达需求,而且造成整个光路更多光功率损耗和散射光,对整个激光器寿命和稳定性会造成严重影响,由于透镜尺寸小,形状结构特殊,透镜的识别以及上料存在较难精确定位的问题,严重影响成本和生产效率。
技术实现要素:
4.本发明提供了一种fac自动耦合封装方法,其目的是为了解决现有fac耦合过程中,fac识别以及上料存在较难精确定位的问题。
5.为了达到上述目的,本发明的实施例提供了一种fac自动耦合封装方法,包括:
6.s1、通过俯视相机获取透镜在料盘中的位置信息;
7.s2、根据获取到的透镜在料盘中的位置信息,从前后两侧夹取透镜并移送至中转台;
8.s3、通过水平相机和俯视相机获取透镜在中转台上的位置信息;
9.s4、根据获取到的透镜在中转台上的位置信息,从上下两侧夹取透镜并移送至激光器芯片处进行耦合;
10.s5、通过光斑检测透镜与激光器芯片是否完成耦合;
11.s6、耦合成功后,对激光器芯片与透镜的耦合处点胶,令激光器芯片与透镜通过胶体固化完成封装。
12.其中,s1具体包括:通过俯视相机获取透镜的高度;通过俯视相机获取透镜在料盘中的摆放姿态。
13.其中,通过俯视相机获取透镜的高度,具体子步骤为:令俯视相机沿竖直方向上下运动;当俯视相机拍摄到透镜最清晰的画面时停止运动并记录俯视相机的停止高度;获得透镜的高度为俯视相机的停止高度减去俯视相机的焦距。
14.其中,从俯视相机的镜头向透镜照射平行光,俯视相机拍摄透镜在平行光下的画面,通过识别画面中亮度最高的侧矩形面获取透镜在料盘中的摆放姿态。
15.其中,s2中,通过透镜的高度设置夹取透镜的高度,通过透镜在料盘中的摆放姿态设置夹取透镜的角度。
16.其中,s3具体包括:通过俯视相机获取透镜在水平方向上的偏转角度,通过水平相
机获取透镜在竖直平面上的偏转角度。
17.其中,s4中,通过透镜在水平方向上的偏转角度和透镜在竖直平面上的偏转角度设置夹取透镜的角度。
18.其中,s6中,通过耦合检测相机检测激光器芯片与透镜的位置,耦合精度达标后夹取透镜远离激光器芯片预设距离,对激光器芯片与透镜的耦合处的两端点点胶,点胶的位置位于激光器芯片的顶面与侧面交汇处,点胶完成后夹取透镜返回原位置重新耦合,当耦合精度再次达标后确认点胶合格。
19.本发明的上述方案有如下的有益效果:
20.本发明的上述实施例所述的fac自动耦合封装方法,通过俯视相机获得透镜在料盘中的高度以及摆放姿态后,从而实现精确的夹取,将透镜夹取并转移至中转台后,通过俯视相机和水平相机分别从水平方向和竖直方向获得透镜在中转台上的摆放姿态,从而精确的夹取透镜并与激光器芯片耦合,耦合精度达标后在耦合处点胶固化完成透镜与激光器芯片的封装。本发明通过透镜的中转二次夹取,精确定位透镜的位置与姿态从而提高夹持精度以及耦合精度,有效提高了耦合成功率与效率。
附图说明
21.图1为本发明的fac自动耦合封装方法流程示意图;
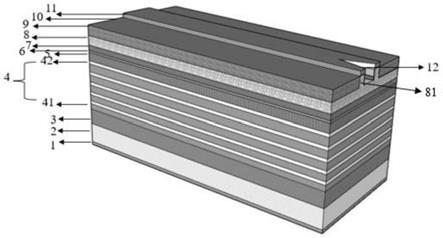
22.图2为本发明的fac快轴准直透镜结构示意图;
23.图3为本发明的实施例2的fac自动耦合封装的结构示意图;
24.图4为本发明的实施例2的fac自动耦合封装的料盘机构示意图;
25.图5为本发明的实施例2的fac自动耦合封装的转运夹具机构示意图;
26.图6为本发明的实施例2的fac自动耦合封装的耦合夹具机构示意图;
27.图7为本发明的实施例2的fac自动耦合封装的点胶固化机构示意图一;
28.图8为本发明的实施例2的fac自动耦合封装的点胶固化机构示意图二;
29.图9为本发明的实施例2的fac自动耦合封装的耦合台机构及检测机构示意图;
30.图10为本发明的实施例2的fac自动耦合封装的透镜和激光器芯片耦合示意图。
31.【附图标记说明】
32.100
‑
料盘机构;200
‑
转运夹具机构;300
‑
耦合台机构;400
‑
耦合夹具机构;500
‑
点胶固化机构;600
‑
加电机构;700
‑
检测机构;800
‑
视觉机构;101
‑
料盘安装座;102
‑
中转台;103
‑
透镜;104
‑
第一料盘直线模组;105
‑
第二料盘直线模组;106
‑
料盘安装座旋转台;107
‑
置物台;108
‑
置物吸附件;201
‑
转运竖直直线模组;202
‑
转运安装板;203
‑
转运夹爪;301
‑
耦合台;302
‑
激光器芯片;303
‑
耦合台偏移模组;304
‑
耦合台水平直线模组;401
‑
耦合夹爪;402
‑
夹爪安装件;403
‑
第一耦合直线模组;404
‑
第二耦合直线模组;405
‑
第三耦合直线模组;406
‑
第一耦合角位移台;407
‑
第二耦合角位移台;501
‑
胶筒;502
‑
固化灯;503
‑
胶筒水平直线模组;504
‑
胶筒竖直气缸;505
‑
胶筒安装件;506
‑
压力传感器;507
‑
固化竖直气缸;508
‑
固化水平气缸;509
‑
固化灯安装件;601
‑
探针;602
‑
探针安装件;701
‑
检测相机;702
‑
潜望镜;703
‑
潜望镜安装板;704
‑
潜望镜竖直气缸;705
‑
潜望镜连接板;706
‑
检测相机安装架;707
‑
检测相机手动调节平台;708
‑
检测相机安装轨道;709
‑
聚焦透镜;801
‑
俯视相机;802
‑
水平相机;803
‑
耦合检测相机。
具体实施方式
33.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
34.本发明针对现有fac耦合过程中,透镜识别以及上料存在较难精确定位的问题,提供了一种fac自动耦合封装方法。
35.实施例1
36.如图1所示,本发明的实施例提供了一种fac自动耦合封装方法,包括如下步骤:
37.s1、由于透镜料盘有可能存在透镜摆放不整齐,透镜高度不一致现象,易导致透镜夹取失败或耦合精度不达标的现象,因此透镜存放在料盘中上料后需要通过俯视相机获取透镜在料盘中的位置信息;其中具体包括,通过俯视相机获取透镜的高度,通过俯视相机沿竖直方向上下运动,当俯视相机拍摄到透镜最清晰的画面时停止运动并记录俯视相机的停止高度,将俯视相机的停止高度减去俯视相机的焦距得到透镜的高度;通过俯视相机获取透镜在料盘中的摆放姿态,从俯视相机的镜头向透镜照射平行光,俯视相机拍摄透镜在平行光下的画面,如图2所示,由于透镜具有特殊结构,通过识别画面中亮度最高的侧矩形面做为识别特征,能够获取透镜在料盘中的摆放姿态;
38.s2、料盘上料后具有z轴方向的旋转自由度,因此根据获取到的透镜在料盘中的摆放姿态,得到透镜相较于正常位得到偏转角度,通过调节料盘的旋转角度令透镜回归正常位,此时透镜与转运夹具的夹爪平行,转运夹具具有z轴方向上的自由度,因此根据获取到的透镜的高度调节转运夹具的下降高度以及夹取透镜的高度,从而保证转运夹具能够从透镜的前后两侧夹取,并将透镜移送至中转台;
39.s3、通过竖直和水平方向的两组平行光照射,通过水平相机和俯视相机能够获取透镜在中转台上的位置信息,此时由于受到平行光照射,透镜的各个面会在相机画面中呈现出不同的亮度,因此通过俯视相机获取透镜在水平方向上的偏转角度,通过水平相机获取透镜在竖直平面上的偏转角度;
40.s4、耦合夹具具有多方向的位移自由度以及旋转自由度,根据获取到的透镜在中转台上的位置信息,通过调整耦合夹具的夹取角度,耦合夹具会从透镜的上下两侧夹取,并将透镜移送至激光器芯片处进行耦合;
41.s5、通过光斑检测透镜与激光器芯片是否完成耦合,检测时对激光器芯片加电,加电后的激光器芯片会发射激光束,激光束的光路上设置有检测相机,检测相机设置有预设范围,耦合夹具夹取透镜与激光器芯片不断耦合,直至激光束照射在检测相机的预设范围内,从而判断透镜与激光器芯片耦合精度达标;
42.s6、通过耦合检测相机检测并记录激光器芯片与透镜的位置,当耦合精度达标后通过耦合夹具夹取透镜远离激光器芯片预设距离,腾出空间从而对激光器芯片与透镜的耦合处的两端点点胶,点胶的位置位于激光器芯片的顶面与侧面交汇处,点胶完成后通过耦合夹具夹取透镜返回原位置重新耦合,当耦合精度再次达标后确认点胶合格,点胶合格后令胶体固化,完成透镜与激光器芯片的封装。
43.实施例2
44.如图3至图10所示,本发明的实施例提供了一种与fac自动耦合封装方法对应的fac自动耦合封装设备,包括:料盘机构100、转运夹具机构200、耦合台机构300、耦合夹具机
构400、点胶固化机构500、加电机构600、检测机构700和视觉机构800;所述料盘机构1包括料盘安装座101和设置在所述料盘安装座101一侧的中转台102,所述料盘机构100用于驱动所述料盘安装座101和中转台102运动,所述料盘安装座101放置有料盘,料盘内存放有多个透镜;所述转运夹具机构200设置在所述料盘机构100上方,所述转运夹具机构200将料盘安装座101的料盘中透镜转移至所述中转台102上;所述耦合台机构300设置有耦合台301,所述耦合台301放置待耦合透镜的激光器,激光器内设置有多个激光器芯片302;所述耦合夹具机构400夹取所述中转台上102的透镜103与激光器芯片302耦合;所述点胶固化机构500设置有胶筒501和固化灯502,所述胶筒501在激光器芯片302的耦合处上点胶后,固化灯502对点胶处照射固化;加电机构600,所述加电机构600设置有探针601,所述探针601接触激光器芯片的电极后激光器芯片会发射激光;检测机构700,所述检测机构700设置有检测相机701和潜望镜702,所述潜望镜702接收激光器芯片302发射的激光并通过检测相机701检测光斑位置,判断耦合位置是否达标;所述视觉机构800设置有俯视相机801、水平相机802和耦合检测相机803,所述俯视相机801用于检测透镜位于料盘中的位置信息,所述俯视相机801和水平相机802配合用于检测透镜103位于所述置物吸附件108上的姿态,所述耦合检测相机803用于检测所述耦合夹具机构400夹取的透镜103与所述耦合台301上激光器芯片302的相对位置
45.如图4所示,在本实施例中,所述料盘机构100设置有第一料盘直线模组104,所述第一料盘直线模组104上设置有第二料盘直线模组105,所述第二料盘直线模组105上设置有料盘安装座旋转台106,所述料盘安装座101设置在所述料盘安装座旋转台106上,所述中转台102通过所述第二料盘直线模组105设置在所述料盘安装座101一侧。
46.在本实施例中,所述中转台102的前端设置有置物台107,所述置物台107的末端开设有置物弹性缝,所述置物弹性缝内夹设有置物吸附件108,所述置物吸附件108的高度可调,所述置物吸附件108连通负压。
47.如图5所示,在本实施例中,所述转运夹具机构200设置有转运竖直直线模组201,所述转运竖直直线模组201的底部通过转运安装板202设置有转运夹爪203,所述转运夹爪203用于从两侧夹取透镜103,将透镜103放置在所述置物吸附件108上。
48.如图6所示,在本实施例中,所述耦合夹具机构400设置有耦合运动平台和耦合夹爪401,所述耦合运动平台设置有第一耦合直线模组403、第二耦合直线模组404、第三耦合直线模组405、第一耦合角位移台406和第二耦合角位移台407,因此实时耦合夹爪401具有x、y、z轴自由度以及tx、ty旋转自由度,所述耦合夹爪401通过一夹爪安装件402设置在所述耦合运动平台的前端;所述耦合夹爪401用于夹取透镜103。
49.如图7所示,在本实施例中,所述点胶固化机构500设置有胶筒运动机构,所述胶筒运动机构设置在所述耦合台机构300上方,所述胶筒运动机构设置有胶筒水平直线模组503和胶筒竖直气缸504,所述胶筒501通过胶筒安装件505设置在所述胶筒竖直气缸504的伸缩端,所述胶筒安装件505与胶筒竖直气缸504之间设置有压力传感器506;
50.如图8所示,所述点胶固化机构500设置有固化灯运动机构,所述固化灯运动机构设置有固化竖直气缸507和固化水平气缸508,所述固化灯502通过固化灯安装件509设置在所述固化水平气缸508的下部。
51.在本实施例中,所述加电机构600设置有探针安装件602,所述探针601通过所述探
针安装件602设置在所述固化灯安装件509上。
52.在本实施例中,当透镜103耦合时所述胶筒运动机构会驱动胶筒501和探针601下移,其中探针601对激光器芯片302加电发射光,所述胶筒501会通过所述胶筒竖直气缸504和胶筒水平直线模组503运动至耦合处点胶,点胶时通过所述压力传感器509实时检测压力防止胶针对激光器芯片302造成损坏,点胶后所述固化灯502会通过所述固化竖直气缸507和固化水平气缸508运动至耦合处,使胶体固化完成透镜封装。
53.如图9所示,在本实施例中所述耦合台机构300设置有两组耦合台偏移模组303,两组所述耦合台偏移模组303上架设有耦合台水平直线模组304,所述耦合台301设置在所述耦合台水平直线模组304上。
54.如图9和图10所示,在本实施例中所述检测机构700包括潜望镜安装板703,所述潜望镜安装板703上设置有潜望镜竖直气缸704,所述潜望镜702通过一潜望镜连接板705安装在所述潜望镜竖直气缸704上,所述潜望镜702设置通过所述潜望镜连接板705设置在所述耦合台301的激光器芯片302附近;所述检测机构7设置有检测相机安装机构,所述检测相机安装机构设置有检测相机安装架706,所述检测相机安装架706上设置有检测相机手动调节平台707,所述检测相机手动调节平台707上设置有检测相机安装轨道708,所述检测相机701设置在所述检测相机安装轨道的一端,所述检测相机安装轨道708的另一端设置有聚焦透镜709。
55.本发明上述实施例所述的fac自动耦合封装设备,所述探针601对所述激光器芯片302加电发射激光后,所述潜望镜702会提前运动到激光光束的光路上,所述潜望镜702由多个光学镜组成,所述潜望镜702能够将接收到的激光光束传输至所述检测相机701,所述检测相机701通过检测所述光束的光斑判断耦合是否成功。
56.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。