1.本发明涉及无人机定位技术领域,具体为一种电力巡检无人机用精确定位装置。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机;无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机这几大类,无人机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。
3.利用无人机进行输电的各种电力设备检查,以便于电力监管部门发现问题并及时维护,保证输电网络的正常运行。无人机检查方式具有高效、快捷、可靠、成本低、不受地域影响的优点,但现有的无人机定位方法一般采用根据全球定位系统进行定位,若没有gps信号,则不能完成对无人机的定位,因此该定位方法适用范围小,定位精度低。
技术实现要素:
4.本发明的目的在于提供一种电力巡检无人机用精确定位装置,以解决上述背景技术中提出的问题。
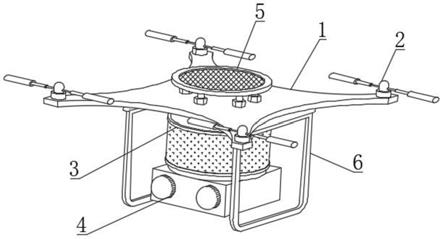
5.为实现上述目的,本发明提供如下技术方案:一种电力巡检无人机用精确定位装置,包括无人机体、定位装置和输电塔,所述定位装置固定安装于无人机体的底部中心,所述输电塔的底部设置有无线信号发射器。
6.所述定位装置由金属外壳、无线信号接收壁、定位器和主控制器组成,所述金属外壳固定安装于定位装置的外表面,所述无线信号接收壁固定安装于金属外壳的外表面,所述定位器固定安装于定位装置的内部,所述主控制器固定安装于定位装置的内部中心。
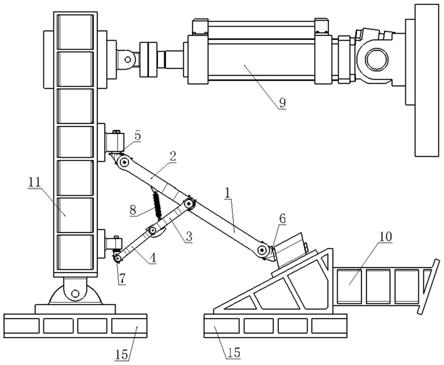
7.优选的,所述无线信号接收壁的内部设置有信号接收器,所述无线信号接收壁与输电塔信号连接,所述无线信号接收壁与定位器信号连接,所述定位器和主控制器电性连接,在对无人机进行定位时,输电塔底部的无线信号发射器会发射出无线信号,无人机的无线信号接收壁接收到无线信号后,将信号传递给定位器,定位器将信号传递给主控制器,主控制器与远端系统信号连接。
8.优选的,所述无人机体的顶部中心固定安装有蓄电装置,所述无人机体的顶部侧面设置有起升装置,所述无人机体的底部侧面固定安装有缓冲机构,所述定位装置的底部固定安装有摄像仪。
9.优选的,所述缓冲机构的数量为两个,两个所述缓冲机构对称分布于无人机体的底部左右两侧,所述摄像仪与主控制器信号连接。
10.优选的,所述起升装置由马达、转轴、护套和叶片组成,所述马达固定安装于无人机体的底部,所述转轴连接于马达的输出端,所述护套固定安装于无人机体的顶部,所述叶片固定连接于转轴的外表面顶部。
11.优选的,所述转轴贯穿无人机体和护套,所述叶片组的数量为两个,两个所述叶片的直径向外侧依次增加,主控制器通过启动马达,马达带动转轴转动,转轴带动其外表面的叶片转动。
12.优选的,所述蓄电装置由安装孔、导电柱、太阳能电池板和微型蓄电池组成,所述安装孔开设于无人机体的顶部,所述太阳能电池板设置于无人机体的顶部,所述导电柱电性连接于太阳能电池板的底部,所述微型蓄电池固定安装于定位装置的内部顶部。
13.优选的,所述导电柱贯穿安装孔,所述导电柱与微型蓄电池电性连接,在无人机飞行时,太阳能电池板会吸收阳光,将太阳能转换为电能,通过导电柱传递给微型蓄电池,储存在微型蓄电池内部为无人机供电。
14.优选的,所述缓冲机构由连接杆、弹簧杆、减震层和耐磨颗粒组成,所述连接杆固定安装于无人机体的底部侧面,所述弹簧杆固定连接于连接杆的底部,所述减震层固定连接于弹簧杆的底部,所述耐磨颗粒固定安装于减震层的底部。
15.优选的,所述弹簧杆的数量为两个,两个所述弹簧杆的底部均与减震层固定连接,所述耐磨颗粒呈半圆弧状,所述耐磨颗粒远离减震层的一侧开设有防滑纹,在无人机降落时,减震层会减少落地时对无人机的冲击,弹簧杆受到冲击后,会被挤压,在弹簧杆撞击到连接杆时,在自身回复力的作用下,会降低落地时对无人机的冲击。
16.与现有技术相比,本发明的有益效果是:
17.1.该电力巡检无人机用精确定位装置,在对无人机进行定位时,输电塔底部的无线信号发射器会发射出无线信号,无人机的无线信号接收壁接收到无线信号后,将信号传递给定位器,定位器将信号传递给主控制器,主控制器与远端系统信号连接,远端系统通过无人机接收到的多个输电塔的无线信号,对无人机进行定位,通过多个输电塔的无线信号,可以准确判断出无人机的位置,提高定位精度,且使用范围广。
18.2.该电力巡检无人机用精确定位装置,在无人机飞行时,太阳能电池板会吸收阳光,将太阳能转换为电能,通过导电柱传递给微型蓄电池,储存在微型蓄电池内部为无人机供电,可以为无人机续航,使无人机的工作时间更久,进行电力巡检的范围更广。
19.3.该电力巡检无人机用精确定位装置,在无人机降落时,减震层会减少落地时对无人机的冲击,弹簧杆受到冲击后,会被挤压,在弹簧杆撞击到连接杆时,在自身回复力的作用下,会降低落地时对无人机的冲击,防止冲击对无人机造成损坏,影响无人机正常工作,耐磨颗粒增加了落地时无人机的稳定性。
附图说明
20.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
21.图1为本发明的整体结构示意图;
22.图2为本发明起升装置结构示意图;
23.图3为本发明定位装置俯视图;
24.图4为本发明蓄电装置结构示意图;
25.图5为本发明缓冲机构结构示意图;
26.图6为本发明输电塔定位示意图。
27.图中:1、无人机体;2、起升装置;201、马达;202、转轴;203、护套;204、叶片;3、定位装置;301、金属外壳;302、无线信号接收壁;303、定位器;304、主控制器;4、摄像仪;5、蓄电装置;501、安装孔;502、导电柱;503、太阳能电池板;504、微型蓄电池;6、缓冲机构;601、连接杆;602、弹簧杆;603、减震层;604、耐磨颗粒;7、输电塔。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
30.请参阅图1
‑
6,本发明提供一种技术方案:一种电力巡检无人机用精确定位装置,包括无人机体1、定位装置3和输电塔7,定位装置3固定安装于无人机体1的底部中心,输电塔7的底部设置有无线信号发射器,无人机体1的顶部中心固定安装有蓄电装置5,无人机体1的顶部侧面设置有起升装置2,无人机体1的底部侧面固定安装有缓冲机构6,定位装置3的底部固定安装有摄像仪4,摄像仪4与主控制器304信号连接,摄像仪4将拍摄到的画面传递给主控制器304,从而进行画面监控。
31.定位装置3由金属外壳301、无线信号接收壁302、定位器303和主控制器304组成,金属外壳301固定安装于定位装置3的外表面,金属外壳301的材质为铝,具有良好的散热性,无线信号接收壁302固定安装于金属外壳301的外表面,定位器303固定安装于定位装置3的内部,主控制器304固定安装于定位装置3的内部中心,无线信号接收壁302的内部设置有信号接收器,无线信号接收壁302与输电塔7信号连接,无线信号接收壁302与定位器303信号连接,定位器303和主控制器304电性连接,在对无人机进行定位时,输电塔7底部的无线信号发射器会发射出无线信号,无人机的无线信号接收壁302接收到无线信号后,将信号传递给定位器303,定位器303将信号传递给主控制器304,主控制器304与远端系统信号连接,远端系统通过无人机接收到的多个输电塔7的无线信号,对无人机进行定位,通过多个输电塔7的无线信号,可以准确判断出无人机的位置,提高定位精度,且使用范围广。
32.起升装置2由马达201、转轴202、护套203和叶片204组成,马达201固定安装于无人机体1的底部,转轴202连接于马达201的输出端,护套203固定安装于无人机体1的顶部,叶片204固定连接于转轴202的外表面顶部,转轴202贯穿无人机体1和护套203,叶片204组的数量为两个,两个叶片204的直径向远离无人机体1的一侧依次增加,主控制器304通过启动马达201,马达201带动转轴202转动,转轴202带动其外表面的叶片204转动,从而带动无人机体1上升,护套203对转轴202起到保护作用。
33.蓄电装置5由安装孔501、导电柱502、太阳能电池板503和微型蓄电池504组成,安装孔501开设于无人机体1的顶部,太阳能电池板503设置于无人机体1的顶部,导电柱502电性连接于太阳能电池板503的底部,微型蓄电池504固定安装于定位装置3的内部顶部,导电柱502贯穿安装孔501,导电柱502与微型蓄电池504电性连接,在无人机飞行时,太阳能电池板503会吸收阳光,将太阳能转换为电能,通过导电柱502传递给微型蓄电池504,储存在微型蓄电池504内部为无人机供电,可以为无人机续航,使无人机的工作时间更久,进行电力巡检的范围更广。
34.缓冲机构6由连接杆601、弹簧杆602、减震层603和耐磨颗粒604组成,连接杆601固定安装于无人机体1的底部侧面,弹簧杆602固定连接于连接杆601的底部,减震层603固定连接于弹簧杆602的底部,耐磨颗粒604固定安装于减震层603的底部,弹簧杆602的数量为两个,两个弹簧杆602的底部均与减震层603固定连接,耐磨颗粒604呈半圆弧状,耐磨颗粒604远离减震层603的一侧开设有防滑纹,在无人机降落时,减震层603会减少落地时对无人机的冲击,弹簧杆602受到冲击后,会被挤压,在弹簧杆602撞击到连接杆601时,在自身回复力的作用下,会降低落地时对无人机的冲击,防止冲击对无人机造成损坏,影响无人机正常工作,耐磨颗粒604增加了落地时无人机的稳定性。
35.在使用时,主控制器304通过启动马达201,马达201带动转轴202转动,转轴202带动其外表面的叶片204转动,从而带动无人机体1上升,输电塔7底部的无线信号发射器会发射出无线信号,无人机的无线信号接收壁302接收到无线信号后,将信号传递给定位器303,定位器303将信号传递给主控制器304,主控制器304与远端系统信号连接,远端系统通过无人机接收到的多个输电塔7的无线信号,对无人机进行定位,通过多个输电塔7的无线信号,可以准确判断出无人机的位置。
36.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个......”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
37.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。