1.本发明属于无人机技术领域,更具体地,涉及一种尾坐式垂直起降太阳能无人机。
背景技术:
2.太阳能无人机是一种以太阳辐射为能源的电动飞行器,其飞行高度高、航时长、航程远,但是翼载低、飞行速度慢、抗风能力弱,在起降阶段存在较大的安全风险。国内外现有的太阳能无人机多采用水平滑跑的起降方式,此种太阳能无人机存在以下不足:(1)依赖于机场跑道起降,使用受限;(2)起降阶段要求不能有大的侧风,否则很容易冲出跑道;(3)无法在空中实现自主悬停、退飞、侧飞等特定动作。
技术实现要素:
3.本发明的目的是针对现有技术中存在的不足,提供一种尾坐式垂直起降太阳能无人机,既能不依赖于机场跑道通过动力结构的设计进行垂直起降,又能在目标上空定点悬停,还能远距离长航时飞行。
4.为了实现上述目的,本发明提供一种尾坐式垂直起降太阳能无人机,该无人机包括:机身;机翼,与所述机身连接,所述机翼的翼尖端向所述机身的上方倾斜;太阳能电池板,设置于所述机翼的上表面;动力结构,设置于所述机翼的翼尖上;起落架,设置在所述动力结构的尾部和所述机身的尾部。
5.可选地,所述机身为短舱式机身,所述机翼包括相互对称的左翼和右翼,所述机身设置在所述左翼和所述右翼的对称面的正下方。
6.可选地,所述机翼为大展弦比飞翼布局,所述机翼为带上反等弦长矩形翼。
7.可选地,所述机翼的后缘对称设置有两片副翼。
8.可选地,所述机翼的上表面设置有柔性薄膜太阳能电池板。
9.可选地,所述机翼内设置有蓄电池,所述蓄电池与所述太阳能电池板和所述动力结构连接。
10.可选地,所述起落架为可收放式起落架。
11.可选地,所述动力结构包括:动力舱,所述动力舱设置在机翼的翼尖上;螺旋桨,设置在所述动力舱的前部;驱动电机,用于驱动所述螺旋桨。
12.可选地,所述螺旋桨为带有自动倾斜器的对转变距桨。
13.可选地,还包括机载航电设备,所述机载航电设备用于控制所述尾坐式垂直起降太阳能无人机的运行。
14.本发明提供一种尾坐式垂直起降太阳能无人机,其有益效果在于:1、该无人机既能不依赖于机场跑道通过动力结构的设计进行垂直起降,又能在目标上空定点悬停,还能远距离长航时飞行;2、该无人机利用太阳能提供能力来源,并具有蓄电池,航时长、航程远,能够大大拓展应用能力;3、该无人机能够通过副翼和带有自动倾斜器的对转变距桨进行运行模式的切换,无需转动机构和复杂的控制机构,结构简单、操控方便、易于实现垂直起降和飞行模式的切换;4、该无人机采用大展弦比飞翼布局,一方面升阻比高,作为固定翼飞行时的性能好;另一方面起落架设置在所述动力结构的尾部和所述机身的尾部,没有尾翼,利于尾坐式停放。
15.本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
16.通过结合附图对本发明示例性实施方式进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显,其中,在本发明示例性实施方式中,相同的参考标号通常代表相同部件。
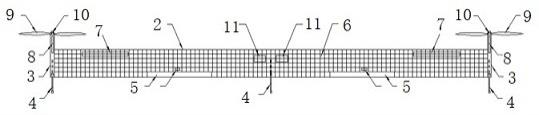
17.图1示出了根据本发明的一个实施例的一种尾坐式垂直起降太阳能无人机的平飞状态的俯视结构示意图。
18.图2示出了根据本发明的一个实施例的一种尾坐式垂直起降太阳能无人机的平飞状态的主视结构示意图。
19.图3示出了根据本发明的一个实施例的一种尾坐式垂直起降太阳能无人机的平飞状态的侧视结构示意图。
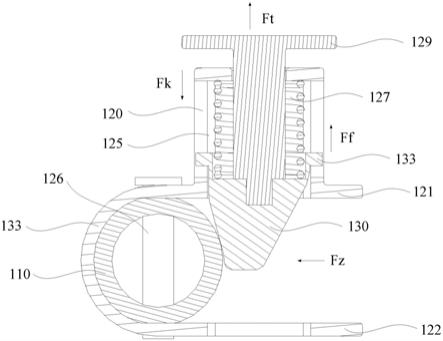
20.图4示出了根据本发明的一个实施例的一种尾坐式垂直起降太阳能无人机的飞行过程示意图。
21.附图标记说明:1、机身;2、机翼;3、动力结构;4、起落架;5、副翼;6、太阳能电池板;7、蓄电池;8、动力舱;9、螺旋桨;10、驱动电机;11、机载航电设备。
具体实施方式
22.下面将更详细地描述本发明的优选实施方式。虽然以下描述了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
23.本发明提供一种尾坐式垂直起降太阳能无人机,该无人机包括:机身;机翼,与机身连接,机翼的翼尖端向机身的上方倾斜;太阳能电池板,设置于机翼的上表面;动力结构,设置于机翼的翼尖上;
起落架,设置在动力结构的尾部和机身的尾部。
24.具体的,该无人机机翼带有上反,并在动力结构的尾部和机身的尾部设置起落架,形成三角形支撑,使得该无人机在起降阶段停放稳定,能够实现垂直起降;该无人机采用高光电转换效率的柔性薄膜太阳能电池板,铺装于机翼上表面,为无人机提供能量来源。
25.可选地,机身为短舱式机身,机翼包括相互对称的左翼和右翼,机身设置在左翼和右翼的对称面的正下方。
26.具体的,左翼和右翼为一体式。
27.可选地,机翼为大展弦比飞翼布局,机翼为带上反等弦长矩形翼。
28.具体的,采用大展弦比飞翼布局,一方面升阻比高,作为固定翼飞行时的性能好;另一方面没有尾翼,利于尾坐式停放。
29.可选地,机翼的后缘对称设置有两片副翼。
30.具体的,副翼实现对无人机的部分操控。
31.可选地,机翼内设置有蓄电池,蓄电池与太阳能电池板和动力结构连接。
32.具体的,采用两组高能量密度的锂电池作为蓄电池,分别左右对称地安装于机翼内部,存储太阳电池转化的部分电能,在日间太阳能量不足时或夜间为无人机提供能量来源。
33.可选地,起落架为可收放式起落架。
34.具体的,三个起落架在该无人机以固定翼模式飞行时,均收于动力结构或机身的短舱内,以减小飞行时的阻力。
35.可选地,动力结构包括:动力舱,动力舱设置在机翼的翼尖上;螺旋桨,设置在动力舱的前部;驱动电机,用于驱动螺旋桨。
36.具体的,两个动力舱分别位于机翼左右翼尖,用于连接机翼并安装螺旋桨和驱动电机;驱动电机为两台无刷直流电机,分别安装于两个动力舱内的前部,驱动螺旋桨转动。
37.可选地,螺旋桨为带有自动倾斜器的对转变距桨。
38.具体的,螺旋桨安装于两个动力舱的正前方,为无人机提供动力;在一个示例中,螺旋桨采用两叶桨,基于太阳能无人机长航时飞行的特点,两叶桨在无人机以固定翼模式飞行时具有更高效率。
39.可选地,还包括机载航电设备,机载航电设备用于控制尾坐式垂直起降太阳能无人机的运行。
40.具体的,机载航电设备包括机载链路、飞控机、惯导、舵机、能源管理器、设备配电器、电气线缆等设备,尽量对称地安装于机翼内部。
实施例
41.如图1至图4所示,本发明提供一种尾坐式垂直起降太阳能无人机,该无人机包括:机身1;机翼2,与机身1连接,机翼2的翼尖端向机身1的上方倾斜;太阳能电池板6,设置于机翼2的上表面;
动力结构3,设置于机翼2的翼尖上;起落架4,设置在动力结构3的尾部和机身1的尾部。
42.在本实施例中,机身1为短舱式机身,机翼2包括相互对称的左翼和右翼,机身1设置在左翼和右翼的对称面的正下方。
43.在本实施例中,机翼2为大展弦比飞翼布局,机翼2为带上反等弦长矩形翼。
44.在本实施例中,机翼2的后缘对称设置有两片副翼5。
45.在本实施例中,机翼2的上表面设置有柔性薄膜太阳能电池板。
46.在本实施例中,机翼2内设置有蓄电池7,蓄电池7与太阳能电池板6和动力结构3连接。
47.在本实施例中,起落架4为可收放式起落架。
48.在本实施例中,动力结构3包括:动力舱8,动力舱8设置在机翼2的翼尖上;螺旋桨9,设置在动力舱8的前部;驱动电机10,用于驱动螺旋桨9。
49.在本实施例中,螺旋桨9为带有自动倾斜器的对转变距桨。
50.在本实施例中,还包括机载航电设备11,机载航电设备11用于控制尾坐式垂直起降太阳能无人机的运行。
51.综上,本发明提供的尾坐式垂直起降太阳能无人机,该无人机起飞时通过打开的起落架4机尾坐地,机载航电设备11逐步协调加大螺旋桨9的转矩和转速,以直升机模式稳定垂直离地,然后起落架4收起。达到一定高度后,自动倾斜器前倾并配合副翼5下偏,产生低头力矩使无人机转入固定翼模式平飞状态。降落时,先爬升至机头竖直向上,然后协调减小螺旋桨9的转矩和转速,缓慢下降高度直至起落架4打开,然后稳定垂直着陆。该无人机在以直升机模式飞行时,分别通过自动倾斜器同步倾斜、自动倾斜器差动倾斜、螺旋桨9差动实现俯仰控制、偏航控制、滚转控制,通过调节螺旋桨9转速和转矩实现垂直升降、侧向飞行、前后飞行控制。该无人机在以固定翼模式飞行时,通过副翼5同步偏转、副翼5差动偏转、螺旋桨9差动实现俯仰控制、滚转控制、偏航控制。飞行全过程中,由太阳能电池板6和蓄电池7提供能量来源。
52.以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。