1.本发明涉及呼吸心跳测量领域,具体涉及基于毫米波雷达的呼吸心跳测量。
背景技术:
2.雷达发射电磁波到空间并接收回波,若空间中存在目标,目标表面会产生反射信号被雷达接收到。目标与雷达之间的距离体现在发射波形与接收波形之间的时延上。雷达按照发射信号的不同分为脉冲雷达和连续波雷达,本发明中讨论的是连续波雷达,更具体来说是线性调频连续波雷达(chirp continuous wave radar)。在线性调频连续波雷达中,发射信号为chirp信号,这是一种频率随着时间成线性变化的信号。在用线性调频连续波雷达测量目标距离时,目标与雷达的距离产生时延差,时延差导致发射信号与接收信号产生固定的频率差,通过测量该频率差进而推断出目标与雷达之间的距离信息。
3.人体在正常呼吸时,胸腔会随着呼吸过程产生相应的起伏,同样的,心脏的跳动亦会带来心脏外皮肤附近的振动。雷达在对人体进行探测时,人体胸腔的起伏和心脏的跳动会导致人体目标与雷达之间的距离发生微弱的变化。这种距离的微弱变化使得接收到的雷达信号产生相应的相位变化。通过测量该相位的变化,可估算出人体的呼吸状态与心跳状态。
4.在用雷达进行人体呼吸、心跳体征监测时,测量点的选取直接影响了呼吸、心跳信号的估计质量。通常的选取方式为人体目标位置回波信号幅度最大处,即:认为雷达回波信号幅度最大处为人体目标胸腔位置。然而,在实际中,由于雷达分辨率的限制及个体之间的差异等原因,雷达回波幅度最大处不一定是胸腔位置,也有可能是腹部或者其他位置,进而导致呼吸、心跳信号估计不准或失效。
5.现有技术cn112674738a公开了一种呼吸心跳信号的检测方法及装置。其中,该方法包括:获取雷达发射的电磁波信号遇到障碍物反射回来的回波信号;从回波信号中提取出目标回波信号,其中,目标回波信号为电磁波信号遇到人体的胸腔反射回来的信号;从目标回波信号中提取出人体的呼吸信号和心跳信号;依据呼吸信号确定人体的呼吸频率,并依据心跳信号确定人体的心跳频率。现有技术cn112168152a公开了一种呼吸心跳的检测方法、检测装置与计算机可读存储介质。该方法包括:获取原始雷达回波;对原始雷达回波进行预处理,得到呼吸心跳信号;对呼吸心跳信号进行滤波处理,得到呼吸信号和心跳信号;在时域确定呼吸信号的有效波峰数目和心跳信号的有效周期数目;根据呼吸信号的有效波峰数目和第一时间长度,确定呼吸信号的有效频率,第一时间长度为呼吸信号的时间长度;根据心跳信号的有效周期数目和第二时间长度,确定心跳信号的有效频率,第二时间长度为心跳信号的时间长度。
6.上述两项现有技术均采用直接从距离维信号中选择能量最高处作为人体目标回波信号的方式确定目标位置。接着,从该人体目标回波处,提取相位信息并进行后续呼吸、心跳信号的估计。然而,直接选取距离维信号中能量最高处作为人体目标回波信号是不合理的。这是因为,由于雷达分辨率的限制及个体之间的差异等原因,雷达回波幅度最大处不
一定就是人体的胸腔位置(也有可能是腹部或者其他)。简言之,雷达回波幅度最大处的呼吸和心跳信号并不一定是最强的,导致呼吸、心跳信号估计不准或失效。此外,上述专利中,仅用距离维信息进行人体目标检测是有缺陷的,若在同个距离(不同方位)同时存在多个人,会导致多个人的呼吸、心跳相互叠加,造成后续呼吸、心跳信号估计错误。
7.因此,现有技术的上述方案中,存在着雷达回波幅度最大处与胸腔位置不匹配导致的呼吸心跳估计不准或失效的问题。
技术实现要素:
8.为了克服上述现有技术的不足,本发明提供一种精确的毫米波雷达呼吸心跳测量方法、系统和存储介质。
9.本发明提供了一种精确的毫米波雷达呼吸心跳测量方法,其特征在于,包括:
10.步骤1,获取雷达发射的电磁波信号遇到障碍物后的反射回波信号;
11.步骤2,根据回波信号幅度信息,得到目标位置a;
12.步骤3,提取位置a及其临近单元的相位信号并做预处理;
13.步骤4,提取位置a及其临近单元的呼吸信号和心跳信号;
14.步骤5,评估位置a及其临近单元的呼吸信号和心跳信号质量,并根据结果确定最终的呼吸测量位置a
b
和心跳测量位置a
h
。
15.可选地,步骤1中,包括:
16.步骤1
‑
1,对雷达原始回波信号进行距离维傅里叶变换;
17.步骤1
‑
2,进行波束成形,得到探测空间中各个点的反射回波。
18.可选地,步骤1
‑
1中,对采集到的每一根天线的雷达回波信号s
echo
进行傅里叶变换得到各个天线的距离维信号其中j为虚数符号,δr为不同距离的相位,t为快时间;
19.可选地,步骤1
‑
2中,对雷达原始回波信号进行波束成形,包括:根据雷达天线的排布情况与雷达探测空间的几何关系,对各个雷达天线的回波信号进行加权,以增强感兴趣信号和抑制干扰信号;
20.具体地,对距离维信号s
range
进行传统波束成形:计算空间目标(分别代表目标的水平、垂直入射角)到达雷达各个天线的时延其中(x
i
,z
i
)为第i根天线相对参考点的坐标;对不同天线接收的信号进行加权求和得到波束成形结果
21.可选地,步骤1中,雷达信号为线性调频连续波。
22.可选地,步骤2中,包括:选取回波信号中幅度最大值的位置作为目标位置a;
23.具体地,smax=max(abs(s
bf
));
24.a=find(abs(s
bf
)==smax);
25.其中,s
bf
为波束成形后的信号;abs(
·
)为取绝对值,max(
·
)表示求最大值,find(
·
)表示找满足条件的目标位置,a为找到的目标位置。
26.可选地,步骤3中,包括:以位置a为原点,提取位置a及其临近单元的相位信号,对相位信号进行解缠绕处理,得到处理后的相位信号;
27.具体地,pha=phase(s
bf
(a));
28.phna1=phase(s
bf
(na1));
29.phna2=phase(s
bf
(na2));
30.……
31.phnan=phase(s
bf
(nan));
32.其中,na1、na2、
……
、nan为位置a临近单元的位置,共n个;pha、phna1、phna2、
……
、phnan为求相位信号后的信号,共n 1个;s
bf
(
·
)为特定位置处的波束成形后的信号;phase(
·
)表示求相位信号;
33.按照时间顺序,对每一帧分别进行上述操作,得到每一个时刻的相位信息,并按照时间先后顺序排列得到一段时间内a及其周围临近单元na处的相位信息,并对相位信号解缠绕操作:
34.phasea=unwrap([pha(1),pha(2),
…
pha(t)]);
[0035]
phasena1=unwrap([phna1(1),phna1(2),
…
phna1(t)]);
[0036]
phasena2=unwrap([phna2(1),phna1(2),
…
phna2(t)]);
[0037]
……
[0038]
phasenan=unwrap([phnan(1),phnan(2),
…
phnan(t)]);
[0039]
其中,phasea、phasena1、phasena2、
……
、phasenan为解缠绕后的信号,共n 1个;pha(
·
)、phna1(
·
)、
……
、phnan(
·
)分别为信号的特定相位,每个信号都包含t个相位;unwrap(
·
)表示对相位信号解缠绕。
[0040]
可选地,步骤4中,包括:
[0041]
步骤4
‑
1,用呼吸带通滤波器对处理后的位置a及其临近单元的相位信号进行带通滤波;
[0042]
步骤4
‑
2,用心跳带通滤波器对处理后的位置a及其临近单元的相位信号进行带通滤波;
[0043]
步骤4
‑
3,得到进行带通滤波后的信号;
[0044]
具体地,呼吸信号表示为:
[0045]
s_breath_a=filter(phasea,bp1);
[0046]
s_breath_na1=filter(phasena1,bp1);
[0047]
s_breath_na2=filter(phasena2,bp1);
[0048]
……
[0049]
s_breath_nan=filter(phasenan,bp1);
[0050]
心跳信号表示为:
[0051]
s_heart_a=filter(phasea,bp2);
[0052]
s_heart_na1=filter(phasena1,bp2);
[0053]
s_heart_na2=filter(phasena2,bp2);
[0054]
……
[0055]
s_heart_nan=filter(phasenan,bp2);
[0056]
其中,filter(
·
)表示对信号进行滤波操作,bp1为通带0.1~0.5hz的滤波器参数,bp2为通带0.8~2.5hz的滤波器参数;s_breath_a、s_breath_na1、s_breath_na2、
……
s_breath_nan为呼吸信号,共n 1个;s_heart_a、s_heart_na1、s_heart_na2、
……
s_heart_nan为心跳信号,共n 1个。
[0057]
可选地,步骤4
‑
1中,呼吸带通滤波器通带范围为0.1
‑
0.5hz;可选地,步骤4
‑
2中,心跳带通滤波器通带范围为0.8
‑
2.5hz。
[0058]
可选地,步骤5中,包括:
[0059]
步骤5
‑
1,对位置a及其临近单元的呼吸信号质量进行评估;
[0060]
步骤5
‑
2,对位置a及其临近单元的心跳信号质量进行评估;
[0061]
步骤5
‑
3,根据结果确定最终的呼吸测量位置a
b
和心跳测量位置a
h
。
[0062]
可选地,步骤5
‑
1中,包括:
[0063]
步骤5
‑1‑
1,对呼吸信号进行慢时间傅里叶变换,得到呼吸信号的慢时间频谱;
[0064]
步骤5
‑1‑
2,保存频谱中呼吸信号频率范围内的最高频点处幅度值;其中,呼吸信号频率范围为0.1
‑
0.5hz;
[0065]
步骤5
‑1‑
3,计算呼吸信号慢时间维自相关函数;
[0066]
步骤5
‑1‑
4,保存自相关函数中呼吸信号周期范围内的峰值;其中,呼吸信号周期范围为2
‑
10s;
[0067]
步骤5
‑1‑
5,对呼吸信号范围内幅度值、自相关值进行加权,得到呼吸质量评分值;
[0068]
可选地,步骤5
‑
1中,对目标位置a处呼吸信号进行质量评估:计算a处呼吸信号的频谱及自相关函数acf,
[0069]
s_breath_a_spec=abs(fft(s_breath_a))
[0070]
s_breath_a_acf=autocorr(s_breath_a)
[0071]
其中,abs(
·
)为取绝对值,fft(
·
)表示求傅里叶变换,autocorr(
·
)表示求自相关函数;保留s_breath_a_spec频率范围[0.1,0.5]hz内幅度的最大值,记为bs1;保留s_breath_a_acf周期范围[2,10]s内幅度的峰值,记为bs2;将bs1与bs2加权融合得到位置a处呼吸信号质量得分:scoreba=a*bs1 b*bs2,其中a,b为bs1、bs2的加权系数,可根据经验进行设置;
[0072]
同样的,分别对na1,na2,
…
nan处进行如上操作,得到na1,na2,
…
nan处呼吸信号质量:scorebna1,scorebna2,
…
,scorebnan;最后,从scoreba,scorebna1,scorebna2,
…
,scorebnan中挑选得分最高值处位置作为呼吸测量点,并输出该位置的呼吸测量结果。
[0073]
可选地,步骤5
‑
2中,包括:
[0074]
步骤5
‑2‑
1,对心跳信号进行慢时间傅里叶变换,得到心跳信号的慢时间频谱;
[0075]
步骤5
‑2‑
2,保存频谱中心跳信号频率范围内最高频点处幅度值;其中,心跳信号频率范围为0.8
‑
2.5hz;
[0076]
步骤5
‑2‑
3,计算心跳信号慢时间维自相关函数;
[0077]
步骤5
‑2‑
4,保存自相关函数中心跳信号周期范围内峰值;其中,心跳信号周期范围为0.4
‑
1.25s;
[0078]
步骤5
‑2‑
5,对心跳信号范围内幅度值、自相关值进行加权,得到心跳质量评分值。
[0079]
可选地,步骤5
‑
2,包括:对目标位置a处心跳信号进行质量评估的方法为:计算a处
心跳信号的频谱及自相关函数acf,
[0080]
s_heart_a_spec=abs(fft(s_heart_a))
[0081]
s_heart_a_acf=autocorr(s_heart_a)
[0082]
其中,abs(
·
)为取绝对值,fft(
·
)表示求傅里叶变换,autocorr(
·
)表示求自相关函数;保留s_heart_a_spec频率范围[0.8,2.5]hz内幅度的最大值,记为hs1;保留s_heart_a_acf周期范围[0.4,1.25]s内幅度的峰值,记为hs2;将hs1与hs2加权融合得到位置a处呼吸信号质量得分:scoreha=c*hs1 d*hs2,其中c,d为hs1、hs2的加权系数,可根据经验进行设置;
[0083]
同样的,分别对na1,na2,
…
nan处进行如上操作,得到na1,na2,
…
nan处心跳信号质量:scorehna1,scorehna2,
…
,scorehnan。最后,从scoreha,scorehna1,scorehna2,
…
,scorehnan中挑选得分最高值处位置作为心跳测量点,并输出该位置的心跳测量结果。
[0084]
可选地,步骤5
‑
3,包括:
[0085]
步骤5
‑3‑
1,找出位置a及其临近单元的呼吸信号最高的质量评分值;
[0086]
步骤5
‑3‑
2,找出位置a及其临近单元的心跳信号最高的质量评分值;
[0087]
步骤5
‑3‑
3,将位置a及其临近单元呼吸信号及心跳信号得分值最大值处位置确定为呼吸和心跳测量位置。
[0088]
本发明提供了一种精确的毫米波雷达呼吸心跳测量系统,其特征在于,包括:
[0089]
反射回波信号获取模块,获取雷达发射的电磁波信号遇到障碍物后的反射回波信号;
[0090]
目标位置获取模块,根据回波信号幅度信息,得到目标位置a;
[0091]
相位信号获取模块,提取位置a及其临近单元的相位信号并做预处理;
[0092]
呼吸信号和心跳信号获取模块,提取位置a及其临近单元的呼吸信号和心跳信号;
[0093]
呼吸测量位置和心跳测量位置获取模块,评估位置a及其临近单元的呼吸信号和心跳信号质量,并根据结果确定最终的呼吸测量位置a
b
和心跳测量位置a
h
。
[0094]
本发明提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行上述精确的毫米波雷达呼吸心跳测量方法。
[0095]
基于上述方案,本发明解决了现有技术中由于测量位置不准确,导致呼吸心跳估计失效或者错误的问题。与只用雷达回波的幅度信息进行目标定位的方法相比,本发明额外利用了相位信息进行位置精确定位,得到的呼吸心跳测量位置更加准确。本发明综合利用了雷达回波的幅度信息和相位信息,从而得到了更加精确的呼吸心跳测量位置,同时提高了呼吸心跳估计精度。
附图说明
[0096]
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0097]
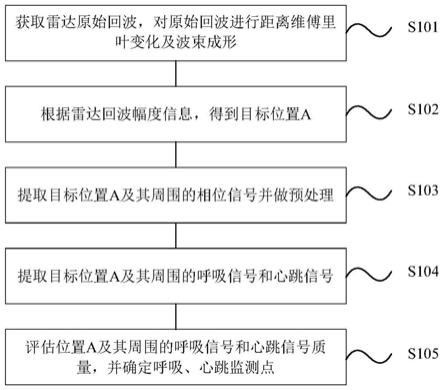
图1为精确的呼吸、心跳检测位置定位流程图。
具体实施方式
[0098]
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0099]
相关术语解释:
[0100]
雷达:利用电磁波探测目标的电子设备;
[0101]
毫米波雷达:工作频率为30
‑
300ghz(对应电磁波波长为10mm~1mm)的雷达;
[0102]
fft:快速傅里叶变换,一种将时域信号变换为频域信号的算法;
[0103]
滤波:是一种将信号中特定波段频率滤除的操作;
[0104]
波束成形:一种空域滤波方法,以增强感兴趣信号和抑制干扰信号为目的。
[0105]
图1是根据本发明实施例的精确的呼吸、心跳检测位置定位流程图。该方法包括以下实施步骤:
[0106]
步骤s101,获取雷达原始回波信号,对原始回波信号进行距离维傅里叶变换和波束成形,得到雷达探测空间的回波;
[0107]
步骤s102,根据步骤s101的结果,选取雷达探测空间回波中幅度最大值处的位置作为目标位置信息并保存;
[0108]
步骤s103,以步骤s102中目标位置信息为原点,分别提取它及其临近单元的相位信号,并对相位信号进行解缠绕处理;
[0109]
步骤s104,对步骤s103中得到的相位信号分别进行带通滤波,得到目标位置及其临近单元的呼吸信号和心跳信号;
[0110]
步骤s105,分别对步骤s104中目标位置及其临近单元的呼吸信号和心跳信号质量进行评估,根据评估质量得到呼吸心跳的准确监测点。
[0111]
通过上述步骤,可以从雷达探测回波中准确地定位目标的呼吸心跳测量点,并得到更加精确的呼吸心跳估计频率(周期)。
[0112]
在另一实施例中,本发明提供了一种精确的毫米波雷达呼吸心跳测量方法,其特征在于,包括:
[0113]
步骤1,获取雷达发射的电磁波信号遇到障碍物后的反射回波信号;
[0114]
步骤2,根据回波信号幅度信息,得到目标位置a;
[0115]
步骤3,提取位置a及其临近单元的相位信号并做预处理;
[0116]
步骤4,提取位置a及其临近单元的呼吸信号和心跳信号;
[0117]
步骤5,评估位置a及其临近单元的呼吸信号和心跳信号质量,并根据结果确定最终的呼吸测量位置a
b
和心跳测量位置a
h
。
[0118]
可选地,步骤1中,包括:
[0119]
步骤1
‑
1,对雷达原始回波信号进行距离维傅里叶变换;
[0120]
步骤1
‑
2,进行波束成形,得到探测空间中各个点的反射回波。
[0121]
可选地,步骤1
‑
1中,对采集到的每一根天线的雷达回波信号s
echo
进行傅里叶变换得到各个天线的距离维信号其中j为虚数符号,δr为不同距离的相
位,t为快时间;
[0122]
可选地,步骤1
‑
2中,对雷达原始回波信号进行波束成形,包括:根据雷达天线的排布情况与雷达探测空间的几何关系,对各个雷达天线的回波信号进行加权,以增强感兴趣信号和抑制干扰信号;
[0123]
具体地,对距离维信号s
range
进行传统波束成形:计算空间目标(分别代表目标的水平、垂直入射角)到达雷达各个天线的时延其中(x
i
,z
i
)为第i根天线相对参考点的坐标;对不同天线接收的信号进行加权求和得到波束成形结果
[0124]
可选地,步骤1中,雷达信号为线性调频连续波。
[0125]
可选地,步骤2中,包括:选取回波信号中幅度最大值的位置作为目标位置a;
[0126]
具体地,smax=max(abs(s
bf
));
[0127]
a=find(abs(s
bf
)==smax);
[0128]
其中,s
bf
为波束成形后的信号;abs(
·
)为取绝对值,max(
·
)表示求最大值,find(
·
)表示找满足条件的目标位置,a为找到的目标位置。
[0129]
可选地,步骤3中,包括:以位置a为原点,提取位置a及其临近单元的相位信号,对相位信号进行解缠绕处理,得到处理后的相位信号;
[0130]
具体地,pha=phase(s
bf
(a));
[0131]
phna1=phase(s
bf
(na1));
[0132]
phna2=phase(s
bf
(na2));
[0133]
……
[0134]
phnan=phase(s
bf
(nan));
[0135]
其中,na1、na2、
……
、nan为位置a临近单元的位置,共n个;pha、phna1、phna2、
……
、phnan为求相位信号后的信号,共n 1个;s
bf
(
·
)为特定位置处的波束成形后的信号;phase(
·
)表示求相位信号;
[0136]
按照时间顺序,对每一帧分别进行上述操作,得到每一个时刻的相位信息,并按照时间先后顺序排列得到一段时间内a及其周围临近单元na处的相位信息,并对相位信号解缠绕操作:
[0137]
phasea=unwrap([pha(1),pha(2),
…
pha(t)]);
[0138]
phasena1=unwrap([phna1(1),phna1(2),
…
phna1(t)]);
[0139]
phasena2=unwrap([phna2(1),phna1(2),
…
phna2(t)]);
[0140]
……
[0141]
phasenan=unwrap([phnan(1),phnan(2),
…
phnan(t)]);
[0142]
其中,phasea、phasena1、phasena2、
……
、phasenan为解缠绕后的信号,共n 1个;pha(
·
)、phna1(
·
)、
……
、phnan(
·
)分别为信号的特定相位,每个信号都包含t个相位;unwrap(
·
)表示对相位信号解缠绕。
[0143]
可选地,步骤4中,包括:
[0144]
步骤4
‑
1,用呼吸带通滤波器对处理后的位置a及其临近单元的相位信号进行带通
滤波;
[0145]
步骤4
‑
2,用心跳带通滤波器对处理后的位置a及其临近单元的相位信号进行带通滤波;
[0146]
步骤4
‑
3,得到进行带通滤波后的信号;
[0147]
具体地,呼吸信号表示为:
[0148]
s_breath_a=filter(phasea,bp1);
[0149]
s_breath_na1=filter(phasena1,bp1);
[0150]
s_breath_na2=filter(phasena2,bp1);
[0151]
……
[0152]
s_breath_nan=filter(phasenan,bp1);
[0153]
心跳信号表示为:
[0154]
s_heart_a=filter(phasea,bp2);
[0155]
s_heart_na1=filter(phasena1,bp2);
[0156]
s_heart_na2=filter(phasena2,bp2);
[0157]
……
[0158]
s_heart_nan=filter(phasenan,bp2);
[0159]
其中,filter(
·
)表示对信号进行滤波操作,bp1为通带0.1~0.5hz的滤波器参数,bp2为通带0.8~2.5hz的滤波器参数;s_breath_a、s_breath_na1、s_breath_na2、
……
s_breath_nan为呼吸信号,共n 1个;s_heart_a、s_heart_na1、s_heart_na2、
……
s_heart_nan为心跳信号,共n 1个。
[0160]
可选地,步骤4
‑
1中,呼吸带通滤波器通带范围为0.1
‑
0.5hz;可选地,步骤4
‑
2中,心跳带通滤波器通带范围为0.8
‑
2.5hz。
[0161]
可选地,步骤5中,包括:
[0162]
步骤5
‑
1,对位置a及其临近单元的呼吸信号质量进行评估;
[0163]
步骤5
‑
2,对位置a及其临近单元的心跳信号质量进行评估;
[0164]
步骤5
‑
3,根据结果确定最终的呼吸测量位置a
b
和心跳测量位置a
h
。
[0165]
可选地,步骤5
‑
1中,包括:
[0166]
步骤5
‑1‑
1,对呼吸信号进行慢时间傅里叶变换,得到呼吸信号的慢时间频谱;
[0167]
步骤5
‑1‑
2,保存频谱中呼吸信号频率范围内的最高频点处幅度值;其中,呼吸信号频率范围为0.1
‑
0.5hz;
[0168]
步骤5
‑1‑
3,计算呼吸信号慢时间维自相关函数;
[0169]
步骤5
‑1‑
4,保存自相关函数中呼吸信号周期范围内的峰值;其中,呼吸信号周期范围为2
‑
10s;
[0170]
步骤5
‑1‑
5,对呼吸信号范围内幅度值、自相关值进行加权,得到呼吸质量评分值;
[0171]
可选地,步骤5
‑
1中,对目标位置a处呼吸信号进行质量评估:计算a处呼吸信号的频谱及自相关函数acf,
[0172]
s_breath_a_spec=abs(fft(s_breath_a))
[0173]
s_breath_a_acf=autocorr(s_breath_a)
[0174]
其中,abs(
·
)为取绝对值,fft(
·
)表示求傅里叶变换,autocorr(
·
)表示求自相
关函数;保留s_breath_a_spec频率范围[0.1,0.5]hz内幅度的最大值,记为bs1;保留s_breath_a_acf周期范围[2,10]s内幅度的峰值,记为bs2;将bs1与bs2加权融合得到位置a处呼吸信号质量得分:scoreba=a*bs1 b*bs2,其中a,b为bs1、bs2的加权系数,可根据经验进行设置;
[0175]
同样的,分别对na1,na2,
…
nan处进行如上操作,得到na1,na2,
…
nan处呼吸信号质量:scorebna1,scorebna2,
…
,scorebnan;最后,从scoreba,scorebna1,scorebna2,
…
,scorebnan中挑选得分最高值处位置作为呼吸测量点,并输出该位置的呼吸测量结果。
[0176]
可选地,步骤5
‑
2中,包括:
[0177]
步骤5
‑2‑
1,对心跳信号进行慢时间傅里叶变换,得到心跳信号的慢时间频谱;
[0178]
步骤5
‑2‑
2,保存频谱中心跳信号频率范围内最高频点处幅度值;其中,心跳信号频率范围为0.8
‑
2.5hz;
[0179]
步骤5
‑2‑
3,计算心跳信号慢时间维自相关函数;
[0180]
步骤5
‑2‑
4,保存自相关函数中心跳信号周期范围内峰值;其中,心跳信号周期范围为0.4
‑
1.25s;
[0181]
步骤5
‑2‑
5,对心跳信号范围内幅度值、自相关值进行加权,得到心跳质量评分值。
[0182]
可选地,步骤5
‑
2,包括:对目标位置a处心跳信号进行质量评估的方法为:计算a处心跳信号的频谱及自相关函数acf,
[0183]
s_heart_a_spec=abs(fft(s_heart_a))
[0184]
s_heart_a_acf=autocorr(s_heart_a)
[0185]
其中,abs(
·
)为取绝对值,fft(
·
)表示求傅里叶变换,autocorr(
·
)表示求自相关函数;保留s_heart_a_spec频率范围[0.8,2.5]hz内幅度的最大值,记为hs1;保留s_heart_a_acf周期范围[0.4,1.25]s内幅度的峰值,记为hs2;将hs1与hs2加权融合得到位置a处呼吸信号质量得分:scoreha=c*hs1 d*hs2,其中c,d为hs1、hs2的加权系数,可根据经验进行设置;
[0186]
同样的,分别对na1,na2,
…
nan处进行如上操作,得到na1,na2,
…
nan处心跳信号质量:scorehna1,scorehna2,
…
,scorehnan。最后,从scoreha,scorehna1,scorehna2,
…
,scorehnan中挑选得分最高值处位置作为心跳测量点,并输出该位置的心跳测量结果。
[0187]
可选地,步骤5
‑
3,包括:
[0188]
步骤5
‑3‑
1,找出位置a及其临近单元的呼吸信号最高的质量评分值;
[0189]
步骤5
‑3‑
2,找出位置a及其临近单元的心跳信号最高的质量评分值;
[0190]
步骤5
‑3‑
3,将位置a及其临近单元呼吸信号及心跳信号得分值最大值处位置确定为呼吸和心跳测量位置。
[0191]
在另一实施例中,本发明提供了一种精确的毫米波雷达呼吸心跳测量系统,其特征在于,包括:
[0192]
反射回波信号获取模块,获取雷达发射的电磁波信号遇到障碍物后的反射回波信号;
[0193]
目标位置获取模块,根据回波信号幅度信息,得到目标位置a;
[0194]
相位信号获取模块,提取位置a及其临近单元的相位信号并做预处理;
[0195]
呼吸信号和心跳信号获取模块,提取位置a及其临近单元的呼吸信号和心跳信号;
[0196]
呼吸测量位置和心跳测量位置获取模块,评估位置a及其临近单元的呼吸信号和心跳信号质量,并根据结果确定最终的呼吸测量位置a
b
和心跳测量位置a
h
。
[0197]
在另一实施例中,本发明提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有多个程序;在所述程序运行时控制所述计算机可读存储介质所在设备加载并执行上述精确的毫米波雷达呼吸心跳测量方法。
[0198]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。