一种基于bds技术的精准喷农药装置
技术领域
1.本发明涉及农药喷洒技术领域,特别涉及一种基于bds技术的精准喷农药装置。
背景技术:
2.bds指北斗卫星导航系统,由空间段、地面段和用户段三部分组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并且具备短报文通信能力,已经初步具备区域导航、定位和授时能力,定位精度为分米、厘米级别,测速精度0.2米/秒,授时精度10纳秒。
3.随着北斗系统建设和服务能力的发展,相关产品已广泛应用于交通运输、海洋渔业、水文监测、气象预报、测绘地理信息、森林防火、通信时统、电力调度、救灾减灾、应急搜救等领域,逐步渗透到人类社会生产和人们生活的方方面面,为全球经济和社会发展注入新的活力。
4.对于农田种植工作来说,需要按需对种植物进行农药喷洒,喷洒农药的功能包括防虫防病、治虫治病、提高植物抗性,增产增收、早熟催熟和增加甜度等。但现有的农药喷洒工作需要农民人力背负药箱进行喷洒,工作难度大。且还要考虑农药药液补充的问题。
5.针对上述问题,本技术提供了一种基于bds技术的精准喷农药装置,结合传统的农业灌溉手段,对农田进行区域划分,每个划分区域内设置自动化控制的农药喷洒管,并通过bds技术确定喷洒管的位置,实现农药药液的补充,实现自动化的农药喷洒工作。
技术实现要素:
6.本发明的目的在于提供一种基于bds技术的精准喷农药装置,分区域设置自动化控制的农药喷洒管,进行喷洒位置的调节,并通过bds技术确定多个喷洒管的位置,控制无人机实现农药药液的补充,实现自动化的农药喷洒工作。
7.本发明提供了一种基于bds技术的精准喷农药装置,包括:将农田均匀划分为若干个区域,每个区域内均设置喷洒组件;所述喷洒组件包括:
8.竖直伸缩杆,底部固定在农田中;
9.水平伸缩杆,通过驱动装置转动安装在所述竖直伸缩杆外部;
10.雾化管,设置在所述水平伸缩杆的一端;
11.喷头,设置在所述雾化管的表面;
12.药液箱,内部设置水位传感器;
13.水泵,设置在所述雾化管的入口处,通过水管与所述药液箱连通;
14.北斗卫星定位模块,用于向远程控制端和无人机发送定位信息;
15.采集装置,用于采集农作物的红外图像;
16.内部控制端,输入端与采集装置电连接,用于处理接收的红外图像得到虫类与果实的位置信息,输入端还与水位传感器电连接,输出端分别与竖直伸缩杆、水平伸缩杆和水泵电连接,用于调节喷头的位置和喷头喷出药液的范围;所述内部控制端与远程控制端通
信连接。
17.进一步地,所述药液箱顶部设置竖直的进液管,所述进液管侧表面设置进液口,所述进液口对应的所述进液管的内壁设置信号发射端。
18.进一步地,设置加液箱给所述药液箱添加药液,所述加液箱设置在无人机的底部。
19.进一步地,所述加液箱包括:
20.加液口;
21.输液口,设置在所述加液箱的底部;
22.l型出液管,包括竖直段和设置在所述竖直段底部的水平段,所述水平段的尺寸小于所述进液口的尺寸,所述水平段的端部设置出液口,所述水平段的侧表面设置信号接收端,所述l型出液管与所述输液口连接,连接处设置阀门;
23.无人机控制端,输入端电连接信号接收端,输出端电连接阀门,收到信号接收端的信号后,控制所述阀门打开。
24.进一步地,所述驱动装置包括:
25.电机,安装在所述竖直伸缩杆的侧表面,与所述内部控制端的输出端电连接;
26.主动齿轮,连接所述电机的转子;
27.从动齿轮,与所述主动齿轮啮合,套接在所述竖直伸缩杆的外部,连接在所述水平伸缩杆的一端。
28.进一步地,所述竖直伸缩杆顶部设置供能装置,所述供能装置包括:
29.太阳能电池板,背部设置螺杆,与所述竖直伸缩杆顶部的螺孔螺接;
30.蓄电池,与太阳能电池板电连接。
31.进一步地,所述采集装置为红外传感器,所述红外传感器设置在雾化管的外部。
32.与现有技术相比,本发明具有如下显著优点:
33.(一)本发明提供了一种基于bds技术的精准喷农药装置,通过将农田合理划分区域,在每个区域内设置农药的喷洒柱,通过转动喷头、调节喷头的水平和竖直位置,保障农田每个区域均能喷洒到药液,并采用无人机运送药液,实现药液的补充工作,解放人力进行自动化的农药喷洒工作。
34.(二)本发明提供了一种基于bds技术的精准喷农药装置,通过采集装置获取农作物的红外图像,处理得到相应的虫类位置或果实位置,通过喷洒除虫剂实现农作物除虫工作,或者喷洒乙烯实现果实催熟工作。并根据虫类位置或果实位置控制水平和竖直的伸缩杆进行喷头位置的调节。
35.(三)本发明提供了一种基于bds技术的精准喷农药装置,通过设置水位传感器获知药液余量,及时安排药液补充。并通过北斗卫星定位模块确定喷洒柱的位置,根据信号发射端配合信号接收端实现药液箱的进液口位置的确定,实现无人机运送药液的目的。
附图说明
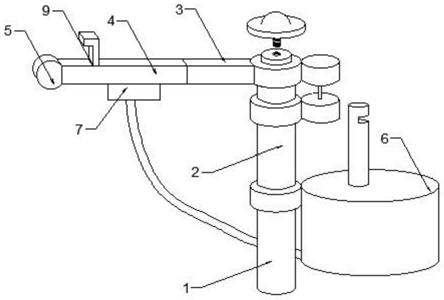
36.图1为本发明实施例提供的一种基于bds技术的精准喷农药装置的喷洒柱结构图;
37.图2为本发明实施例提供的一种基于bds技术的精准喷农药装置的驱动装置结构图;
38.图3为本发明实施例提供的一种基于bds技术的精准喷农药装置的供能装置结构
图;
39.图4为本发明实施例提供的一种基于bds技术的精准喷农药装置的药液箱结构图;
40.图5为本发明实施例提供的一种基于bds技术的精准喷农药装置的加液箱结构图;
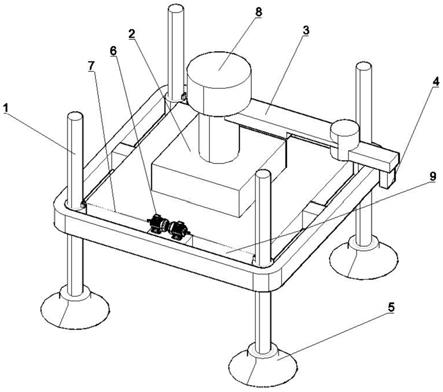
41.图6为本发明实施例提供的一种基于bds技术的精准喷农药装置的精准喷农药系统组成图。
42.附图标记说明:1
‑
喷洒组件,2
‑
竖直伸缩杆,3
‑
水平伸缩杆,4
‑
雾化管,5
‑
喷头,6
‑
药液箱,7
‑
水泵,8
‑
加液箱,9
‑
采集装置,201
‑
内部控制端,202
‑
电机,203
‑
主动齿轮,204
‑
从动齿轮,205
‑
太阳能电池板,601
‑
进液管,602
‑
进液口,801
‑
水平段,802
‑
竖直段。
具体实施方式
43.下面结合本发明中的附图,对本发明实施例的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
44.北斗卫星导航系统(bds)由空间段、地面段和用户段三部分组成:
45.空间段由若干地球静止轨道卫星、倾斜地球同步轨道卫星和中圆地球轨道卫星组成。
46.地面段包括主控站、时间同步/注入站和监测站等若干地面站,以及星间链路运行管理设施。
47.用户段包括北斗及兼容其他卫星导航系统的芯片、模块、天线等基础产品,以及终端设备、应用系统与应用服务等。
48.北斗卫星导航系统具有以下特点:
49.一是北斗系统空间段采用三种轨道卫星组成的混合星座,与其他卫星导航系统相比高轨卫星更多,抗遮挡能力强,尤其低纬度地区性能特点更为明显。
50.二是北斗系统提供多个频点的导航信号,能够通过多频信号组合使用等方式提高服务精度。
51.三是北斗系统创新融合了导航与通信能力,具有实时导航、快速定位、精确授时、位置报告和短报文通信服务五大功能。
52.因此,本技术应用bds技术,实现喷洒组件的快速定位,实现无人机的实时导航,以及实现与远程控制端之间的短报文通信服务,通过实时获取若干个喷洒组件的位置信息及其水位信息,控制无人机进行该喷洒组件药液的添加工作。
53.参照图1
‑
图6,本发明提供了一种基于bds技术的精准喷农药装置,将农田均匀划分为若干个区域,每个区域的中心位置均设置喷洒组件1,便于覆盖该区域进行药液喷洒;喷洒组件1包括:
54.竖直伸缩杆2,底部固定在农田中,通过调节竖直伸缩杆2的高度进行喷洒位置高度的调节;
55.水平伸缩杆3,通过驱动装置转动安装在竖直伸缩杆2外部,通过调节水平伸缩杆3的长度进行喷洒位置水平长度的调节,并且通过驱动装置进行水平伸缩杆3水平方向的转动,实现覆盖整个区域的喷洒工作;
56.雾化管4,内部设置雾化装置,用于将药液液体分散成微小液滴,成雾状喷射出去,将雾化管4设置在水平伸缩杆3的一端,水平伸缩杆3的长度变动带动雾化管4的位置发生变动;
57.喷头5,设置在雾化管4的表面,用于输出呈细小液滴状的雾化药液;
58.药液箱6,内部设置水位传感器,当水位达到预设值,则将信号发送至远程控制端,进行药液补充;
59.水泵7,设置在雾化管4的入口处,通过水管与药液箱6连通,将药液箱6内部的药液泵入雾化管4进行雾化;
60.北斗卫星定位模块,用于向远程控制端和无人机发送喷洒组件1的定位信息;
61.采集装置9,为红外传感器,设置在雾化管4的外部,用于采集农作物的红外图像;
62.内部控制端201,输入端与采集装置9电连接,用于处理接收的红外图像,根据红外信息得到农田内虫类与果实的位置信息,通过调整雾化管4的位置,实现不同位置的红外图像的获取工作,分析得到不同位置的虫类和果实的红外信息;输入端还与水位传感器电连接,用于实时获取药液的水位,辨别药液的余量;输出端分别与竖直伸缩杆2、水平伸缩杆3和水泵7电连接,用于调节喷头5的位置和喷头5喷出药液的范围,水泵7加压使得喷射范围更远;内部控制端201与远程控制端通信连接,用于发送水位信息或其他消息给远程控制端。
63.参照图3,其中,竖直伸缩杆2顶部设置供能装置,供能装置包括:
64.太阳能电池板205,背部设置螺杆,与竖直伸缩杆2顶部的螺孔螺接;
65.蓄电池,与太阳能电池板205电连接,用于给内部控制端201、竖直伸缩杆2、水平伸缩杆3、水泵7、采集装置9和水位传感器供电,保证整个喷洒组件1的正常运行。
66.实施例1
67.参照图4,药液箱6顶部设置竖直的进液管601,进液管601侧表面设置进液口602,侧表面的设置确保不会落入灰尘和雨水,保证药液的纯度,进液口602对应的进液管601的内壁设置信号发射端。
68.设置加液箱8给药液箱6添加药液,加液箱8设置在无人机的底部,由无人机侧添加满药液,将其运送到适宜的喷洒柱1处。
69.参照图5,加液箱8包括:
70.加液口,用于添加药液;
71.输液口,设置在加液箱8的底部,用于输出药液;
72.l型出液管,包括竖直段802和设置在竖直段802底部的水平段801,水平段801的尺寸小于进液口602的尺寸,方便轻松将水平段801置入进液口602内部,水平段801的端部设置出液口,保证添加药液的时候药液全部落入药液箱6内,水平段801的侧表面设置信号接收端,l型出液管与输液口连接,连接处设置阀门,当无人机到达定位的位置,通过无人机自动的摄像头确定药液箱6的位置,使得l型出液管进入进液口602,信号接收端和信号发射端发生对接,信号接收端和信号发射端信号对接后,控制阀门开启,进行药液输送;
73.无人机控制端,输入端电连接信号接收端,输出端电连接阀门,收到信号接收端的信号后,控制阀门打开。
74.实施例2
75.参照图2,驱动装置包括:
76.电机202,安装在竖直伸缩杆2的侧表面,与内部控制端201的输出端电连接,由内部控制端201控制电机202的启停和转速;
77.主动齿轮203,连接电机202的转子,由电机202带动转动;
78.从动齿轮204,与主动齿轮203啮合,套接在竖直伸缩杆2的外部,连接在水平伸缩杆3的一端,通过啮合的结构,使得从动齿轮204带动雾化管4进行转动,实现覆盖式的药液喷洒工作。
79.工作原理:参照图1的结构和图6的系统构成,在药液箱6中药液量充足时,内部控制器201获取采集的红外信息,分析处理出虫类或果实的位置,由内部控制器201控制竖直伸缩杆2、水平伸缩杆3和驱动装置进行喷头位置的调节,通过将药液箱6内部的药液泵入雾化管4雾化,然后由喷头喷出,进行目标位置的喷洒。
80.若不是为了对农田进行杀虫或催熟,则不用根据红外信息进行调节,均匀覆盖整个区域进行喷洒即可。
81.由水位传感器获取的数据进行判断,在药液箱6中药液量不充足时,内部控制器201向远程控制端发送信息,远程控制端获取到补液信息和位置信息,控制无人机到达该位置进行补液,整个系统的实施过程中,远程控制端、无人机和喷洒组件1均采用北斗卫星系统进行位置确定。
82.无人机达到预定位置后,通过摄像头确定药液箱6的位置,实现进液口602与l型出液管水平段801的对接,实现药液的输送与补充。
83.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。