技术特征:
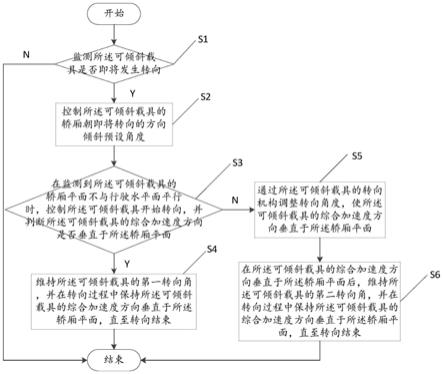
1.一种可倾斜载具的控制方法,其特征在于,所述可倾斜载具的支点不小于3个,所述控制方法包括:监测所述可倾斜载具是否即将发生转向;若所述可倾斜载具即将发生转向,则控制所述可倾斜载具的轿厢朝即将转向的方向倾斜预设角度;在监测到所述可倾斜载具的轿厢平面不与行驶水平面平行时,控制所述可倾斜载具开始转向,并判断所述可倾斜载具的综合加速度方向是否垂直于所述轿厢平面;若所述可倾斜载具的综合加速度方向垂直于所述轿厢平面,则维持所述可倾斜载具的第一转向角,并在转向过程中保持所述可倾斜载具的综合加速度方向垂直于所述轿厢平面,直至转向结束。2.根据权利要求1所述的可倾斜载具的控制方法,其特征在于,所述判断所述可倾斜载具的综合加速度方向是否垂直于所述轿厢平面的步骤之后,包括:若所述可倾斜载具的综合加速度方向没有垂直于所述轿厢平面,则通过所述可倾斜载具的转向机构调整转向角度,使所述可倾斜载具的综合加速度方向垂直于所述轿厢平面;在所述可倾斜载具的综合加速度方向垂直于所述轿厢平面后,维持所述可倾斜载具的第二转向角,并在转向过程中保持所述可倾斜载具的综合加速度方向垂直于所述轿厢平面,直至转向结束。3.根据权利要求2所述的可倾斜载具的控制方法,其特征在于,所述可倾斜载具上部署有加速度传感器,所述通过所述可倾斜载具的转向机构调整转向角度,使所述可倾斜载具的综合加速度方向垂直于所述轿厢平面的步骤,包括:通过所述加速度传感器获取所述综合加速度方向;根据所述综合加速度方向和所述轿厢的倾斜角度,解析得到所述综合加速度方向与所述轿厢平面之间的夹角;根据所述夹角获取所述转向角度,所述转向角度包括转向方向和角度值;控制所述转向机构按照所述转向方向和所述角度值进行调整,使所述可倾斜载具的综合加速度方向垂直于所述轿厢平面。4.根据权利要求1所述的可倾斜载具的控制方法,其特征在于,所述在转向过程中保持所述可倾斜载具的综合加速度方向垂直于所述轿厢平面,直至转向结束的步骤之后,包括:调整所述轿厢的倾斜角度,使所述轿厢平面与所述可倾斜载具的行驶支撑面平行。5.根据权利要求1所述的可倾斜载具的控制方法,其特征在于,所述监测所述可倾斜载具是否即将发生转向的步骤,包括:获取预设行驶路径、实时路况影像和可倾斜载具定位位置;根据所述可倾斜载具定位位置和所述实时路况影像确定所述可倾斜载具在所述预设行驶路径的实际位置;当所述可倾斜载具行驶至所述实际位置距离所述预设行驶路径上的转向位置为预设间距时,则判定所述可倾斜载具即将发生转向。6.一种可倾斜载具的控制装置,其特征在于,所述可倾斜载具的支点不小于3个,所述控制装置包括:监测模块,用于监测所述可倾斜载具是否即将发生转向;
倾斜模块,用于若所述可倾斜载具即将发生转向,则控制所述可倾斜载具的轿厢朝即将转向的方向倾斜预设角度;判断模块,用于在监测到所述可倾斜载具的轿厢平面不与行驶水平面平行时,控制所述可倾斜载具开始转向,并判断所述可倾斜载具的综合加速度方向是否垂直于所述轿厢平面;第一转向模块,用于若所述可倾斜载具的综合加速度方向垂直于所述轿厢平面,则维持所述可倾斜载具的第一转向角,并在转向过程中保持所述可倾斜载具的综合加速度方向垂直于所述轿厢平面,直至转向结束。7.根据权利要求6所述的可倾斜载具的控制装置,其特征在于,所述控制装置,还包括:第一调整模块,用于若所述可倾斜载具的综合加速度方向没有垂直于所述轿厢平面,则通过所述可倾斜载具的转向机构调整转向角度,使所述可倾斜载具的综合加速度方向垂直于所述轿厢平面;第二转向模块,用于在所述可倾斜载具的综合加速度方向垂直于所述轿厢平面后,维持所述可倾斜载具的第二转向角,并在转向过程中保持所述可倾斜载具的综合加速度方向垂直于所述轿厢平面,直至转向结束。8.根据权利要求6所述的可倾斜载具的控制装置,其特征在于,所述可倾斜载具上部署有加速度传感器,所述第一调整模块,包括:第一获取单元,用于通过所述加速度传感器获取所述综合加速度方向;解析单元,用于根据所述综合加速度方向和所述轿厢的倾斜角度,解析得到所述综合加速度方向与所述轿厢平面之间的夹角;第二获取单元,用于根据所述夹角获取所述转向角度,所述转向角度包括转向方向和角度值;调整单元,用于控制所述转向机构按照所述转向方向和所述角度值进行调整,使所述可倾斜载具的综合加速度方向垂直于所述轿厢平面。9.一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至5中任一项所述方法的步骤。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5任一项所述的方法的步骤。
技术总结
本申请提供了一种可倾斜载具的控制方法、装置和计算机设备,可倾斜载具的支点不小于3个,车载系统在可倾斜载具即将发生转向时,提前控制轿厢倾斜预设角度,并在轿厢倾斜后才控制可倾斜载具开始转向,从而使得车载系统具有优秀的及时性和鲁棒性。在可倾斜载具的转向过程中,车载系统能够及时、准确地调整可倾斜载具的综合加速度方向垂直于轿厢平面,通过轿厢的倾斜抵消可倾斜载具转向时产生的离心力,提高可倾斜载具在转向过程中的稳定性和安全性。高可倾斜载具在转向过程中的稳定性和安全性。高可倾斜载具在转向过程中的稳定性和安全性。
技术研发人员:杨铭轲
受保护的技术使用者:杨铭轲
技术研发日:2021.07.28
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。