1.本发明涉及一种分拣设备领域,尤其涉及一种高速分拣设备。
背景技术:
2.目前对小型物体分拣,如蓝莓、大豆、矿物颗粒等,依靠rgb或红外的2d相机进行识别,经算法计算下落速度后,在下方的分拣区域用高速气枪或者拨片击打不合格物品,将其剔除至不合格料区,以达到分拣目的。
3.设备的识别滑道产生的摩擦力导致了物体通过识别区域时的速度较慢,影响了整体速度;设备在喂料、剔除区域均为自由落体,速度较通过识别滑道时要快,因而分拣物体在由喂料的高速通道进入剔除区域的低速通道时,会造成重叠堆积,造成识别错误。
4.例如,一种在中国专利文献上公开的“一种机械零部件自动分拣装置”,其公告号cn209935302u,包括底座,所述底座顶前侧壁和后侧壁的右侧固定安装有收纳箱,所述底座顶部固定安装四个支架,右侧所述支架和左侧所述支架顶部固定安装有转轴,所述转轴表面固定安装有传送带,左侧所述支架前侧壁顶部固定安装有一号电机,且所述一号电机输出端贯穿支架与转轴连接,所述底座底部右侧固定安装伺服电机,所述伺服电机输出端贯穿底座固定安装有转动杆,所述转动杆顶部固定安装有拨片。
5.现有方案的识别模块为2d方案(红外或rgb),因此被测物在识别区域需要紧密贴合在呈平面的识别滑道上,以保证其识别准确性。识别滑道产生的摩擦力导致了物体通过识别区域时的速度较慢,影响了整体速度。
技术实现要素:
6.本发明主要解决现有技术因滑道造成的生产效率降低和识别准确性低的问题;提供一种高速分拣设备,取消振筛到分拣喷枪间的滑道设计,采用结合dtof和rgb技术识别,使被测物在从振筛下落后,通过虹吸的作用,保证物体通过识别区域的速度。
7.本发明的上述技术问题主要是通过下述技术方案得以解决的:一种高速分拣设备,包括下料通道、振筛和合格料框,振筛设置在下料通道的上部,合格料框设置在下料通道的底部;还包括分拣通道,所述的分拣通道与下料通道相交处形成识别区,分拣通道底部设置有废料框;识别区域处设置有分拣执行装置和相机,分拣执行装置和相机沿分拣设备的横向方向间隔设置。
8.本方案取消识别区域的滑道,减少了在识别区域被测物体的摩擦力,保证了被测物体在通过识别区域时的速度。本方案全程保持自由落体的高速,不存在识别区域的减速环节,避免造成物料的重叠堆积,减少识别错误。
9.作为优选,所述的振筛固定在的下料通道的上部,下料通道的上部一侧设有开口,振筛的一端从开口伸入下料通道内部,振筛伸入下料通道内部的一端低于振筛的另一端。通过振筛抖落被测物体,取消振筛到喷枪件的滑道设计,减少摩擦力。
10.作为优选,所述的振筛伸入下料通道内部的一端处设置有第一挡板,第一挡板的
一端与下料通道的顶部连接;在识别区域上方,沿下料通道下料方向设置有第二挡板;在合格料框靠近废料框的一侧设置有第三挡板。
11.通过第一挡板对被测物体导向,从而在下料通道中自由落体。第二挡板用于限定被测物体下落过程的区域,保证被测物体下落到识别区域;第三挡板避免下落的良品距离过远而到废料框中。
12.作为优选,所述的分拣通道侧面设置有风扇,风扇的风向朝向分拣设备外部。通过设置在下方的风扇往设备外排出空气,造成设备内部处于相对低压/负压的状态。在保证设备其余部分气密性的情况下,外部的空气将从振筛处的入口处被吸入,并快速流动到设备底部从风扇处被排出。而被测物在下落的过程中将随着气流被加速,以高于自由落体的速度进行运动。
13.作为优选,所述的相机包括dtof相机和rgb相机,dtof相机和rgb相机分别平行设置在下料通道的两侧。dtof为3d相机,能够识别空间层面的远近距离,从而不再需要识别滑道将被测物排列在一个平面上。由此,可以取消现有方案上的识别滑道,进而解决因滑道造成的生产效率降低和识别准确性低的问题。
14.作为优选,所述的分拣执行装置为喷枪,喷枪设置在相机下方。通过喷枪喷气分拣次品。
15.作为优选,通过计算被测物体的三维坐标以及运动轨迹,确定分拣执行装置的动作时机,将不合格的被测物体分拣到废料框。通过计算三维坐标和运动轨迹,取消现有方案上的识别滑道,进而解决因滑道造成的生产效率降低和识别准确性低的问题。
16.作为优选,所述的动作时机t通过下式确定:其中,a为加速度;v
zo
为z轴方向的初始速度;z0为第一次拍摄时被测物体的z轴坐标;z3为动作时打击点的z轴坐标;加速度a和初始速度v
zo
通过下式计算得到:下式计算得到:其中,t为相机的拍摄间隔;z1为第二次拍摄时被测物体的z轴坐标。
17.确定动作时机。
18.作为优选,所述的喷枪沿横向间隔距离y分布,选取喷枪的过程如下:n=[y3÷
y]其中,y3为动作时打击点的y轴坐标;n为第n 1把喷枪编号;
y轴坐标为0处设置第一把喷枪,编号为0。
[0019]
确定动作的喷枪。
[0020]
本发明的有益效果是:1.取消识别区域的滑道,减少了在识别区域被测物体的摩擦力,保证了被测物体在通过识别区域时的速度。
[0021]
2.本方案全程保持自由落体的高速,不存在识别区域的减速环节,避免造成物料的重叠堆积,减少识别错误。
[0022]
3.通过设置的风扇往设备外排出空气,造成设备内部处于相对低压/负压的状态,被测物在下落的过程中将随着气流被加速,以高于自由落体的速度进行运动。
附图说明
[0023]
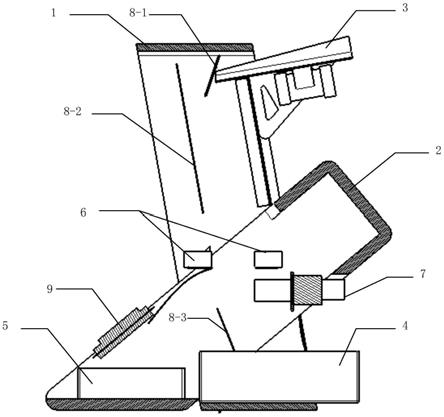
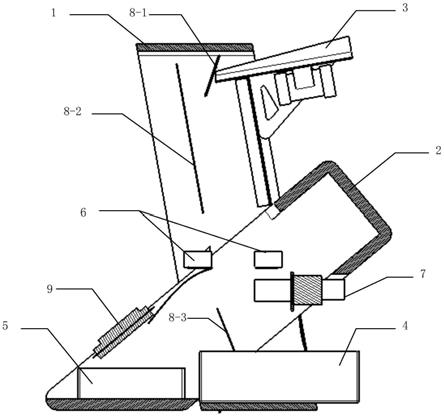
图1是本发明的一种高速分拣设备的剖视图。
[0024]
图中1.下料通道,2.分拣通道,3.振筛,4.合格料框,5.废料框,6.相机,7.分拣执行装置,8
‑
1.第一挡板,8
‑
2.第二挡板,8
‑
3.第三挡板,9.风扇。
具体实施方式
[0025]
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
[0026]
实施例:本实施例的一种高速分拣设备,如图1所示,包括下料通道1、分拣通道2、振筛3、合格料框4和废料框5。
[0027]
下料通道1和分拣通道2相交处形成识别区,在本实施例中,下料通道1竖直设置,由上到下向右倾斜;分拣通道2从上到下向左倾斜,分拣通道2与下料通道1的下部相交。
[0028]
振筛3设置在下料通道1的上部。振筛3固定在的下料通道1的上部,下料通道1的上部一侧设有开口,振筛3的一端从开口伸入下料通道1内部,振筛3伸入下料通道1内部的一端低于振筛3的另一端。
[0029]
通过振筛3抖落被测物体,取消振筛3到喷枪间的滑道设计,减少摩擦力。
[0030]
合格料框4设置在下料通道1的底部,废料框5设置在分拣通道2底部。
[0031]
识别区域处设置有分拣执行装置7和相机6,分拣执行装置7和相机6沿分拣设备的横向方向间隔设置。在本实施例中,分拣执行装置7为喷枪,喷枪设置在相机6下方。相机6包括dtof相机和rgb相机,dtof相机和rgb相机分别平行设置在下料通道1的两侧。
[0032]
dtof为3d相机,能够识别空间层面的远近距离,从而不再需要识别滑道将被测物排列在一个平面上。由此,可以取消现有方案上的识别滑道,进而解决因滑道造成的生产效率降低和识别准确性低的问题。
[0033]
振筛3伸入下料通道1内部的一端处设置有第一挡板8
‑
1,第一挡板8
‑
1的一端与下料通道1的顶部连接。通过第一挡板8
‑
1对被测物体导向,从而在下料通道1中自由落体。
[0034]
在识别区域上方,沿下料通道1下料方向设置有第二挡板8
‑
2。第二挡板用于限定被测物体下落过程的区域,保证被测物体下落到识别区域。
[0035]
在合格料框4靠近废料框5的一侧设置有第三挡板8
‑
3。第三挡板8
‑
3避免下落的良品距离过远而到废料框5中。
[0036]
本实施例的方案取消识别区域的滑道,减少了在识别区域被测物体的摩擦力,保证了被测物体在通过识别区域时的速度。全程保持自由落体的高速,不存在识别区域的减速环节,避免造成物料的重叠堆积,减少识别错误。
[0037]
分拣通道2侧面下方设置有风扇9,风扇9的风向朝向分拣设备外部。
[0038]
通过设置在下方的风扇9往设备外排出空气,造成设备内部处于相对低压/负压的状态。在保证设备其余部分气密性的情况下,外部的空气将从振筛3处的开口被吸入,并快速流动到设备底部从风扇9处被排出。而被测物在下落的过程中将随着气流被加速,以高于自由落体的速度进行运动。
[0039]
分拣设备的实施过程如下:1.被测物被放入顶端的振筛3中。
[0040]
2.被测物通过震动,平铺散布在振筛3中。
[0041]
3.被测物通过从振筛3的较高处滑落至较低处。
[0042]
4.被测物经第一挡板8
‑
1导向后自由掉落。
[0043]
5.掉落的被测物通过布置了dtof和rgb相机的识别区域。
[0044]
6.通过计算被测物的三维坐标以及运动轨迹,确定分拣喷枪的动作时机。
[0045]
假定被测物从振筛3下落后,在x轴、y轴和z轴方向上所具有的初始速度分别为v
x0
,v
y0
,v
z0
,设备内部在x轴与y轴方向没有额外的扰流致使物体产生该方向的加速度,仅在z轴方向(竖直)存在虹吸的加速力f。
[0046]
假定dtof相机的拍摄时间间隔为t,以dtof相机连续拍摄的3张图作为计算样本,则被测物对应3次拍摄图像的坐标分别为(x
o
,y0,z0),(x1,y1,z1),(x2,y2,z2),喷枪击打的需求坐标点为(x3,y3,z3),时间点为被测物第一次被dtof相机捕捉拍摄后的t1秒后。
[0047]
由于被测物从振筛掉落后,其运动轨迹近似抛物线状态,因此本次计算以z轴方向的运动分析作为时间t的主要计算依据,并以x轴作为修正,计算得出喷枪实际喷射时机t1。同时y轴的计算将用于判断由横向的第几个喷枪进行动作(分拣工位,由多台喷枪在y轴即横向方向上均布)。
[0048]
动作时机t通过下式确定:其中,a为加速度;v
z0
为z轴方向的初始速度;z0为第一次拍摄时被测物体的z轴坐标;z3为动作时打击点的z轴坐标。喷枪呈水平布置,因此根据喷枪的安装高度即可得出z轴的坐标。
[0049]
本实施例中假定a为定值,实际情况a如存在浮动,则可以通过增加计算样本量来修正得到近似的数值,本实施例中不做展开。
[0050]
加速度a和初始速度v
z0
通过下式计算得到:
其中,t为相机的拍摄间隔;z1为第二次拍摄时被测物体的z轴坐标。
[0051]
在本实施例中,假设t=0.1,z0=0,z1=0.16,z2=0.44,z3=0.84,则通过计算得出a=12,v
z0
=1,t=0.3。即在0.3之后,喷枪进行喷射。
[0052]
由于被测物同时在深度(即x轴)方向上存在前后分布,因此通过前面相机拍到的坐标组,可以得到:可以得出v
x0
,然后通过得出的时间t,可以计算得出喷枪喷射时的被测物在x轴上的坐标信息x3即x3=t
×
v
x0
。
[0053]
由于喷枪与被测物之间存在间距,因此喷枪需要提前于时间t开启动作。此处把相对t提前的时间差描述为t1。此间喷枪的气流运动时间不能简单计算得出,但喷枪因此可以通过试验的方法统计被测物与喷枪的x向距离与t1的关系。并形成插值列表,最终根据被测物的实际计算情况选用对应的插值进行修正。
[0054]
例t=0.3,根据推测的x3坐标选择插值t1=0.01,则最终t1=0.29。
[0055]
喷枪沿横向间隔距离y分布,选取喷枪的过程如下:n=[y3÷
y]其中,y3为动作时打击点的y轴坐标;n为第n 1把喷枪编号;y轴坐标为0处设置第一把喷枪,编号为0。
[0056]
7.分拣喷枪按照计算的时机喷气,将不合格的被测物喷射废料框5。
[0057]
8.合格的被测物自由掉落至合格料框4。
[0058]
9.分拣完成。
[0059]
应理解,实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。