1.本发明属于技空投术领域,具体涉及一种基于薄翼理论设计的变桨距折叠 旋翼伞降空投装置。
背景技术:
2.在空投方式中,传统的伞降一直占据主流地位。降落伞自发明至今,经过 工艺的不断改良、设计的逐步优化,拥有着诸多优点。但是,由于其本质为采 用“伞衣 伞绳”的模式,主要依靠其降落时的压差阻力进行减速,潜力已几近 极限,一些较为突出的问题始终无法得到有效解决。例如,不论是战时物资补 给,还是紧急救援物资的投送,伞降的成本和损耗始终相当高,而且还可能存 在由于气候环境影响造成的失效以及散布度大造成的二次损失;此外,伞降后 物资处于投后不管的状态,我们无法对投放物资的降落速度和位置进行实时监 测和反馈,而且降落伞的回收和折叠也非常繁琐。与之相比,自旋翼模式具有 高升阻比、桨距可调、低故障率、低成本、受气候影响小等优势。为了提高物 资补给的效率,减小二次损失并能够对物资进行实时监测,我们设计并制作了 一种折叠“旋翼 伞降”空投缓冲装置,其具有重复利用率高、减速明显、折叠 便捷、夜间易寻、路径实时反馈等优势,为救灾、战时补给提供了一种新颖的 解决方案。
技术实现要素:
3.本发明的目的是针对现有空投装置补给效率低、成本高、受气候影响大, 且不便折叠的问题,提供了一种基于薄翼理论设计的变桨距折叠旋翼伞降空投 装置。
4.本发明是通过以下技术方案实现的:一种基于薄翼理论设计的变桨距折叠 旋翼伞降空投装置,包括货舱、翼头和折叠旋翼三部分;
5.所述货舱整体形状为六面体结构,所述货舱包括底座,所述底座的六个角 上均设有连接杆,相邻两个所述连接杆之间设有舱壁,所述连接杆的上端设有 顶板,所述顶板的外侧设有六个连接架,所述顶板中心通过连接轴和连接架连 接在货舱上部;
6.所述翼头包括翼头箱体,所述翼头箱体的内部设有三个方向上的舵机安装 板,所述翼头箱体的内部中间设有轴承座,所述轴承座和连接轴装配连接;
7.所述轴承座的外侧安装支撑板;
8.所述折叠旋翼包括翼根和外翼,所述翼根段和外翼段通过碳管相连;所述 翼根的侧面连接安装轴,所述安装轴的另一端和翼头内部舵角和舵机连接;所 述翼根和外翼通过带扭簧的不锈钢304合页。
9.优选的,所述舱壁、底座、顶板和连接架上均在考虑材料强度前提下设计 了相应的减重孔。
10.优选的,所述安装板的两端固定连接在翼头箱体的内壁上,所述安装板的 表面设置有一组大圆孔、一组矩形开孔和一组安装孔,所述大圆孔用来翼头内 部的布线,所述安装孔用来安装折叠旋翼。
11.优选的,所述底座和顶板均为碳纤维材料制成。
12.优选的,所述舱壁为亚克力材料制成。
13.优选的,所述旋翼的安装角度为8
°‑
12
°
。
14.优选的,所述旋翼的半展长为0.35m
‑
0.5m。
15.本发明相比现有技术具有以下优点:
16.1、本发明在原传统伞降空投的基础上,增加了可折叠的旋翼设备,并通过 数学建模和参数优化得出了旋翼的安装角和半展长耦合下的最优参数选择。与 传统伞降空投相比,带有自旋翼的空投设备具有高升阻比、桨距可调、低故障 率、低成本、受气候影响小等优势,且对物资的降落速度和位置能进一步跟 踪。
17.2、相比传统装置,本发明中增加了缓冲着陆架和夜间可视灯,使得装置夜 间易寻,保障投放装置及物资的完备,并实现合理的减震缓冲部件以减小装置 落地的冲击与防倾倒。
18.3、本发明能广泛地应用在救灾和战时补给中,同时本发明在装载相关仪器 时也可应用在险地考察和勘测现场。在市场上可以采用军民共用的生产方式并 可给予相关销售许可,实现军民互帮互助的重要作用。
附图说明
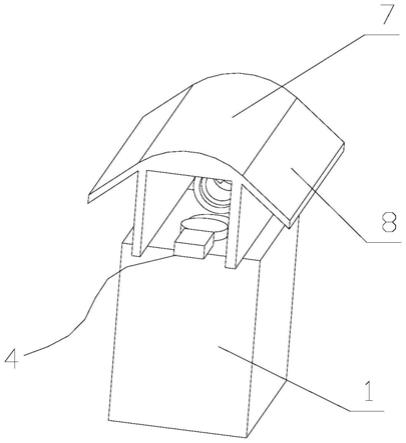
19.图1为本发明示意图;
20.图2为本发明俯视示意图;
21.图3为本发明侧视示意图;
22.图4为本发明箱体结构示意图;
23.图5为本发明翼头结构示意图;
24.图6为本发明折叠旋翼结构部分示意图;
25.图7为本发明折叠旋翼结构示意图;
26.图8为本发明旋翼下落时的受力状况示意图;
27.图9为本发明旋翼剖面气流方向示意图;
28.图10为本发明旋翼剖面受力示意图;
29.图11为本发明的下落速度、旋翼线速度及相对合速度与时间的关系;
30.图12为本发明中旋翼不同安装角下半展长对落地速度的影响。
[0031][0032]
图中标号:1、底座;2、连接杆;3、舱壁;4、顶板;5、连接架;6、连 接轴;7、轴承座;8、翼头箱体;9、支撑板;10、安装板;11、翼根;12、安 装轴;13、外翼。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清 楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是 全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造 性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
实施例一
[0035]
由图1
‑
9可知,本发明提供了一种工程技术方案,由货舱、翼头和折叠旋 翼三部分的设计组成。以下详细介绍三部分的组成内容和设计思路。
[0036]
由图4可知,货舱整体形状为六面体结构,由碳纤维材料的底座1、六个 相应连接杆2和亚克力材料的舱壁3构成。为减重设计,舱壁3和碳纤维底座 1均在考虑材料强度前提下,设计了相应的减重孔。为保证货舱与图5所对应 的翼头部件顺利装配,我们在货舱上增添了一个碳纤维材料的顶板4,顶板4 中心通过连接轴6和相应的六对连接架5与货舱部分连接;同理为了减重和缓 冲考虑,我们在碳纤维顶板4和连接架5上也设计了相应的减重孔。
[0037]
货舱的六个连接杆2下端穿过底座1向下延伸,且连接杆2的下端设有减 震缓冲部件,并通过减震缓冲部件以减小装置落地的冲击与防倾倒。
[0038]
货舱的外侧还设有夜间可视灯,使得装置夜间易寻,保障投放装置及物资 的完备。
[0039]
图5旋翼头为安装旋翼和放置降落伞的核心装置,外部由六面体的翼头箱 体8和三个方向的舵机安装板10组成。其中,安装板10表面设置有一组大圆 孔、一组矩形开孔和一组安装孔,通过大圆孔方便翼头内部的布线,并通过安 装孔可以进行安装折叠旋翼。此外,中心放置了轴承座7与图4中的连接轴6 装配,在轴承座7附近安装支撑板9防止使用中的脱落和位移。下落过程中, 旋翼头的转动可带动连接的旋翼转动。
[0040]
折叠旋翼部分由图6的翼根11部分和图7的外翼13段构成。翼根11段 和外翼13段通过碳管相连,图6的翼根11通过安装轴12连接到翼头内部, 翼根11段的安装轴12通过舵角与舵机相连,三个futabas3003舵机安装在安 装板10上,达到调控安装角变桨距的目的;外翼13段通过带扭簧的不锈钢 304合页与翼根11段相连,并达到折叠效果。在下降过程中,旋翼产生的升力 和向上的气流使得外翼段自行展开,相比于卡板和插销等连接方式,该方式尽 可能减少了对旋翼的气动外形的破坏,结构承载能力大。
[0041]
技术说明
[0042]
在对装置进行动力学建模时,旋翼分析采用简化的平板绕流方法。平板绕 流是分析机翼升阻力一种简单、实用的经典理论模型。平板绕流的问题可以根 据薄翼理论计算出解析解。对于低速不可压流动,升阻力公式为:
[0043][0044]
其中l为旋翼升力,d为旋翼所受阻力,u为旋翼合速度,s为旋翼的参 考面积,c
l
为升力系数,c
d
为阻力系数,ρ为空气密度。阻力系数在全攻角范 围内都可写作:c
d
=2sin2α。而平板的升力在大攻角和小攻角的情况下则需要 分类讨论:当攻角超过某一数值(15
°
左右)时,平板会发生流动分离,升力 系数会突然降低,因此,在未发生流动分离的小攻角状态下,升力系数可表示 为c
l
=2πsinα;在较大攻角情况下,由于发生大面积流动分离,升力系数相 对前者下降为c
l
=2sinαcosα。在仿真分析中,我们结合实际主要考虑小攻角下 的受力情况。
[0045]
旋翼的升阻力的计算基于平板绕流的计算结果,由于旋翼的展弦比比较 大,因此忽略叶尖诱导的升阻力效应。在旋翼下落过程中,如图8所示,在旋 翼三个不同的位置绘制
出速度矢量关系和气动力受力分析,其中v
a
表示合速 度,v
r
表示旋转的线速度,v
e
表示竖直下落速度,f表示气动力,上标123表 示三种位置。在靠近翼尖区域,旋转线速度较大,使得旋翼攻角较小,因此产 生的气动力相对于垂直方向向后倾斜,其水平分量阻碍旋翼旋转,即对应图8 中的被驱动区域,随着靠近旋翼根部,旋转线速度逐渐下降,当地迎角逐渐变 大,气动合力的方向逐渐向前前倾,逐渐驱动旋翼旋转,如图8中的驱动区 域;而当靠近翼根段时,迎角继续增大,旋翼即将进入失速状态,如图8中的 失速区域。为了简化起见,我们将旋翼中点的升阻力系数设为旋翼的平均升阻 力系数,考虑旋翼气动力对旋翼运动的驱动作用。
[0046]
由于装置在水平方向上的滑翔运动不影响其竖直方向的运动,因此相关运 动方程的建立中只考虑装置的竖直方向运动过程,其运动的自由度有两个:竖 直平动和绕旋翼主轴的转动。竖直平动是装置在旋翼升力、降落伞和货舱的阻 力和重力作用下进行运动;绕主轴转动的旋翼在驱动力的作用下做加速运动。 旋翼转动时的气流流向和剖面受力分析如图9、图10所示。
[0047]
基于以上分析,建立旋翼的运动方程为:
[0048]
mg
‑
(dsinr lcosr)=ma
[0049]
r(lsinr
‑
dcosr)=jβ
[0050]
其中m和j为装置的总质量和绕主轴的转动惯量,α和β为装置竖直方向 的加速度和绕主轴转动的角加速度,g为重力加速度,r为旋翼的半展长,l 和d为旋翼升力和阻力,r为旋翼攻角α和安装角θ之和,即合成气流与旋转 相对运动气流夹角。
[0051]
舱体部分分成降落伞和货舱两部分考虑,降落伞与旋翼固连,在下落过程 中增加了空气作为流体对运动物体产生的额外的阻力。为了简化计算,将展开 的降落伞视为半球体,考虑半球体下落过程中所受的阻力并且将流场中的流动 视为层流。考虑到其表面积形状及光滑度等因素,阻力公式可写为:f1=k1ρa1v2,a1为降落伞的横截面积,k1为阻力系数(k1≈0.42,假设re≈104),假设阻力 系数不随雷诺数变化,v为下落速度;同理,货舱在下落过程中,也会受到空气 阻力的影响,运用上述所令的假设,将货舱简化为圆柱体货舱其阻力方程为: f2=k2ρa2v2,a2为货舱的横截面积,k2为阻力系数(k2≈0.82,假设re≈ 104)。
[0052]
首先,我们选取以下标准参数来仿真装置的下落过程。参数的选取根据制 作材料的质量和长度估算,整个装置空载2.5kg,设定初始高度为30m,旋翼的 半展长为0.45m,旋翼弦长为0.15m,旋翼安装角为8
°
,旋翼的转动惯量按照 计算得到,求解考虑货舱和降落伞阻力的微分方程组,并绘制竖直下落速度 v、旋翼的线速度wr和相对气流合速度u与下落时间的关系,从图11可知, 落地速度v≈8.75m/s。
[0053]
对于空投装置,我们希望整个装置的落地速度较小,这样可以尽量减少落 地冲击对装置所造成的结构损伤,同时提高下落过程的平均速度,缩短空中下 落时间,从而使整个装置减少受水平运动的影响,在实际空投下落中,水平运 动很容易受到环境影响。因此我们在参数优化中重点考虑落地速度和下落时 间,在两者之间探索最优解。对于设备的落地速度和落地时间其主要取决于旋 翼的安装角和半展长,我们对这两个参数设定初始范围,安装角设为2
°‑ꢀ
15
°
,旋翼半展长设为0.2m
‑
0.5m,分别对这两个参数进行单参数和对双参数 进行联合优化。
[0054]
考虑安装角的单参数优化,即考虑旋翼安装角对装置落地速度和下落时间 的影响,单旋翼的质量约为300g。
[0055]
表1对安装角优化的结果
[0056][0057][0058]
其次,考虑旋翼半展长因素,对旋翼半展长进行优化,旋翼半展长从0.2m 到0.5m的数值结果如下表:
[0059]
表2对半展长优化的结果
[0060]
半展长(m)落地速度(m/s)下落时间(s)0.223.67912.52310.2523.26612.55320.322.55622.60010.3520.96602.68780.45.71353.80600.455.73536.29890.55.74367.4403
[0061]
从表中数据可知,随着半展长的增加,落地速度先减小后有小幅度增加; 下落时间先小幅度增加后大幅度增加。
[0062]
从上述表中数据可知,安装角的变化范围为2
°‑6°
时,在该范围内旋翼 半展长的影响较小,虽然理论上的落地速度达到期望的较小值,但整个装置下 落时间仍然较长,安装角的影响占主要因素;当安装角在13
°‑
15
°
范围时, 下落时间得到了进一步地减少,但是落地速度过大,旋翼半展长的影响因素较 小。对于旋翼半展长,当其取值范围为0.2m
‑
0.3m时,装置的落地速度近乎 为从30m高度自由下落的速度值,由此可见当旋翼展长过小时,产生的升阻 力较小,对装置下落过程产生的影响近似可忽略。综上所述,联合优化的参数 的
初步范围考虑安装角为8
°‑
12
°
,旋翼半展长为0.35m
‑
0.5m。
[0063]
图12为安装角为某一固定值时,所对应的落地速度和旋翼半展长的关系 以及下落时间和旋翼半展长的关系。从图中可以看出,安装角越大,整体落地
[0064]
进一步分析可知安装角为9
°
,旋翼半展长r=0.4m时为转折点。当r>0.4m 时,落地速度变化趋势较小,下落时间变化趋势较大;当r<0.4m时,落地速度 变化趋势较大,下落时间变化趋势较小。所以,当安装角为9
°
,旋翼半展长r =0.4m时,下落时间和落地速度达到联合优化的最优解。
[0065]
综合考虑货舱和降落伞的阻力影响,整个系统的动力学方程可进一步改写 为:
[0066][0067][0068]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将 一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些 实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、
ꢀ“
包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列 要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列 出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要 素。在没有更多限制的情况下。由语句“包括一个......限定的要素,并不排除在 包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
[0069]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而 言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多 种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。