1.本发明属于无人机应用和工程机械技术领域,特别是涉及多旋翼无人机电网高空作业安全绳挂接装置,主要用于电网高空作业中绳体的挂接作用。
背景技术:
2.在日常的电网高空作业中,电工需要攀爬到作业区域,然后将自己安全带的绳体挂接在横担或线缆上,保证自己在意外坠落时,能够起到缓冲、悬挂和防坠落的作用,但是,这样的提前预挂绳体的方式,工作人员在挂绳时,本身存在一定的安全隐患,随着无人机领域的逐渐发展,人们逐渐通过无人机来代替人工进行挂绳,使挂绳更加的安全;
3.如现有公开文献,cn209037856u
‑
多旋翼无人机电网高空作业安全绳挂接装置,公开了包括电动遥控放绳器、悬挂支架、滑车和牵引绳,电动遥控放绳器和悬挂支架分别设置于多旋翼无人机的左右两个脚架上;电动遥控放绳器的转轮中间设置隔板将转轮分为里腔和外腔,隔板的外圆周上设置卡口;电动遥控放绳器自无人机取电和遥控转轮旋转;悬挂支架的前下端设置有支架挂钩,支架挂钩钩住滑车上端的锁舌圆环将滑车与悬挂支架挂接;牵引绳对折挂在隔板的卡口处,牵引绳对折的两端分别置于转轮的里腔和外腔内,牵引绳的两端头设置有铁质垂重。本实用新型操作简单方便,安全高效,有效解决了电网高空作业过程中绳体自动挂接和防坠问题,保障作业人员的安全,并且缩减了成本。
4.上述公开文献中的挂接装置,在配合以无人机可以实现绳体的快速、高效且安全的挂接,但是,上述绳体挂接装置在实际的使用过程中,依然存在以下的不足;
5.1.现有公开文献中的挂接装置在使用时,因为需要将横担或电缆移动到开口的内侧,才能实现本装置的初步安装,因此,对无人机的操作有很高的要求,尤其需要将本装置挂接在多个并列电缆内侧的任意一个上或电缆之间的横担上时,更加需要高要求的无人机操作;
6.2.现有公开文献中的挂接装置在放绳时,为了确保隔板两侧的绳体均能同步放出,避免绳体的缠绕,工作人员在绕绳时,需要格外注意,避免绕绳时的重叠,而且放绳的速度也需要有相应的要求(在大风的天气下,易出现绳体的重新饶合),导致绳体绕绳和放绳的整体操作麻烦;
7.3.现有公开文献中的挂接装置在工作人员完成高空作业之后,依然需要无人机配合来将挂接装置勾起,才能实现拆卸,整个拆卸方式操作麻烦;
8.因此,有必要对现有技术进行改进,以解决上述技术问题。
技术实现要素:
9.本发明的目的在于提供一种挂接便捷、高效、收放绳操作简单且装置整体拆卸方便的多旋翼无人机电网高空作业安全绳挂接装置,解决了现有公开文献中的挂接装置在使用时,存在挂接不便、操作麻烦、收放绳操作复杂和装置整体拆卸不便的问题。
10.为解决上述技术问题,本发明是通过以下技术方案实现的:
11.本发明为多旋翼无人机电网高空作业安全绳挂接装置,包括挂绳机构、放绳盒、无人机安装架和第一工形轮,所述第一工形轮中同轴固接的第一转动轴两端分别通过滚动轴承转动连接在第一固定板和第二固定板上,所述第一固定板和第二固定板的外侧均设置有u形活动杆,所述u形活动杆的两个竖直杆均滑动套合在第一固定板外侧壁上的第一矩形套中或/和第二固定板外侧壁上的第二矩形套中;
12.所述u形活动杆上端的横杆中部设置有第一通孔,两个所述第一通孔均用于联动杆的滑动套接,所述联动杆的一端通过连接条与无人机安装架上固设的电动伸缩杆一端固定连接;
13.与第二固定板活动配合的u形活动杆的下端还配合设置有挂绳机构,所述挂绳机构包括u形板、第二工形轮和l形卡板,所述第二工形轮设置在u形板的内侧,且第二工形轮中同轴固接的第二转动轴两端分别通过滚动轴承转动连接在u形板上;
14.所述u形板封闭端的外壁上固定连接有l形卡板,同时u形板开口端的两竖直板上均设置有第二通孔,所述第二通孔中间隙配合有固定销,所述固定销通过固定块固定连接在u形活动杆的外侧壁上;
15.与第二固定板活动配合的u形活动杆的下端内壁上还设置有用于与l形卡板上的凹槽卡合的档杆;
16.所述第二工形轮用于绳体的饶合。
17.本发明通过上述改进,当无人机带动本装置移动到横担或电缆上之后,通过无人机操作,可以实现第一工形轮贴合在横担或电缆上,然后,控制电动伸缩杆伸出,在电动伸缩杆逐渐伸出之后,联动杆逐渐与两个u形活动杆脱离,首先脱离的是配合在第一固定板上的u形活动杆、然后脱离的是配合在第二固定板上的u形活动杆,u形活动杆在重力的作用下,向下移动,当挂绳机构移动到第二固定板的下方之后,会以固定销为轴进行转动,l形卡板搭建在档杆上,实现本装置的快速、简单的挂接。
18.进一步地,所述固定销上方的u形活动杆两竖直杆之间通过第一u形架固定连接,所述第一u形架靠近u形活动杆内部的一侧设置有推板,所述推板一侧面上的第一伸缩杆的一端滑动穿过第一u形架与第一限位盘固定连接,且第一u形架和推板之间位置的第一伸缩杆上滑动套接有第一复位弹簧。
19.进一步地,所述第一u形架的顶面中部还固定连接有l形定位杆,所述l形定位杆的自由端上设置有第三通孔,所述l形卡板的自由端上设置有第一盲孔,所述第一盲孔和第三通孔之间通过插销配合定位,所述插销通过捆绑绳固定连接在u形活动杆一侧的联动杆上。
20.进一步地,第二矩形套一侧壁上还设置有用于固定块滑动穿过的矩形开口槽。
21.进一步地,所述放绳盒固定连接在无人机安装架上,所述放绳盒的内部设置有收卷辊,所述收卷辊固定套接在转动柱上,所述转动柱的两端转动连接在放绳盒侧壁上,所述转动柱的一端穿过放绳盒嵌合在电机的输出端中,且电机固定连接在放绳盒的外侧壁上。
22.进一步地,所述收卷辊用于绳体的饶合,且绳体的两端均固定连接有配重铁柱。
23.作为本发明的一种进一步改进,所述放绳盒的下方设置有盒门,所述盒门的一侧通过铰链与放绳盒铰合,所述盒门上还设置有用于绳体穿过的放绳槽,且放绳槽离铰链较远的一端为开口设置;
24.所述放绳槽开口端的一侧设置有铁块,且铁块正上方的放绳盒外侧壁上固定安装
有第一电磁柱;
25.所述收卷辊侧壁的中部位置设置有用于配重铁柱滑动套接的第二盲孔,所述第二盲孔的内侧壁上固定安装有第二电磁柱。
26.本发明通过上述改进,当饶合在第二工形轮上的绳体一端下方到一定程度之后,第一电磁柱通过断电失去磁性,在失去磁性的作用下,盒门的一端以铰链为轴进行转动,放绳盒中的绳体一股脑排出,而第二电磁柱在断电失磁的作用下,配合在第二盲孔中的绳体一端也可以自由排出。
27.作为本发明的另一种进一步改进,所述第一固定板主要由第一板体和第二板体沿上下方向拼接而成,所述第一板体的底面中部设置有用于第一转动轴配合的矩形板,所述矩形板两侧的第一板体底面上对称设置有第一矩形槽;所述第二板体的顶面中部设置有用于矩形板间隙配合的第二矩形槽,同时第二板体的顶面上还设置有用于第一矩形槽间隙配合的矩形块;
28.所述矩形块和第一矩形槽配合位置的第一固定板上沿水平方向设置有两端径尺小于中部径尺的通槽;
29.所述矩形块和第一矩形槽上的通槽之间通过凸形定位销配合定位;
30.位于凸形定位销大径尺的一端通过第二复位弹簧固定连接在通槽中部的定位盘上,且定位盘固定连接在通槽内壁上,同时凸形定位销的另一端固定连接有挂环;
31.位于凸形定位销大径尺的一端侧壁上还设置有第三盲孔,所述第三盲孔用于定位柱一端的间隙配合,两个所述定位柱的另一端均滑动穿过第二板体延伸至第二板体的上方连接同一连接板上;
32.所述连接板的顶面两侧还分别固定连接有第二伸缩杆,所述第二伸缩杆的另一端活动穿过第二u形架与第二限位盘固定连接,第二u形架和连接板之间位置的第二伸缩杆上滑动套接有第三复位弹簧,所述第二u形架固定连接在第二板体的顶面上;
33.两个第二伸缩杆之间位置的第二u形架上固定套接有第三电磁柱;
34.所述连接板的材质选用铁、钴、镍中的任意一种。
35.本发明通过上述改进,在对本装置进行拆卸时,工作人员可以远程通过微型处理模块控制第三电磁柱通电,在通电产生磁性的作用下,定位柱从第三盲孔中脱离,在失去限位的作用下,凸形定位销在第二复位弹簧的作用下,可以将凸形定位销向内侧拖动,凸形定位销失去对第一板体和第二板体的限位,第一板体在重力的作用下脱离,同时,第二板体可以连同第一固定板在拽动绳体的作用下,可以在失去平衡的作用下,从横担或电缆上脱离。
36.进一步地,所述第二板体靠近第一工形轮的一侧面上还固定安装有控制器,所述控制器中固定安装有无线收发模块、储电模块和微型处理模块,所述微型处理模块通过传导线分别与无线收发模块、储电模块和第三电磁柱电性连接。
37.进一步地,所述矩形板相邻的三个侧壁上设置有u形限位条,同时第二矩形槽的内侧壁上设置有用于u形限位条间隙配合的u形限位槽。
38.本发明具有以下有益效果:
39.1、本发明通过电动伸缩杆带动联动杆的移动,可以实现两个u形活动杆在重力的作用下,移动到第一固定板和第二固定板的下方,挂绳机构在与第二固定板脱离之后,可以自动在两个u形活动杆之间实现搭建,该设置使挂绳装置与横担或电缆之间的配合更加的
高效,便捷,同时对无人机的操作要求较低。
40.2、本发明在绕绳时,不需要避开绳体之间的重叠,提高绕绳的速度,放绳盒的设置,也可以避免在放绳时的绳体重新饶合在收卷辊上,同时,本装置对电机的转速没有过多的要求,多余的绳子可以叠放在盒门上,通过上述设置可以使本装置的绕放绳更加的便捷,操作简单。
41.3、本发明在第三电磁柱通电的作用下,可以实现定位柱在第三盲孔的脱离,在第二复位弹簧拖动的作用下,可以解除凸形定位销对第一板体和第二板体的限位,在重力的作用下,首先可以实现第一板体的脱离,而第一固定板和第二板体的连接体,在拽动绳体的作用下,可以在失去平衡的前提下,使整个装置与横担或电缆脱离,通过上述设置可以实现本装置的快速拆卸,避免重新通过无人机进行拆卸而带来的不便。
附图说明
42.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
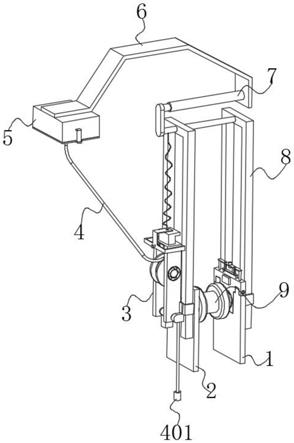
43.图1为本发明的结构示意图;
44.图2为本发明图1结构的右视图;
45.图3为本发明挂绳完成之后的状态示意图;
46.图4为本发明拆卸状态下的示意图;
47.图5为本发明中挂绳机构的结构示意图;
48.图6为本发明中u形活动杆、第一u形架和固定销的连接体的结构示意图;
49.图7为本发明中第一固定板、第二固定板和第一工形轮的连接体的结构示意图;
50.图8为本发明中第一固定板的爆炸图;
51.图9为本发明中第一固定板的竖直剖视图;
52.图10为本发明图6中a处的放大图;
53.图11为本发明中放绳盒、无人机安装架和电动伸缩杆的连接体的结构示意图;
54.图12为本发明中放绳盒的竖直剖视图。
55.附图中,各标号所代表的部件列表如下:
56.1、第一固定板;2、第二固定板;3、挂绳机构;4、绳体;5、放绳盒;6、无人机安装架;7、电动伸缩杆;8、u形活动杆;9、第一工形轮;101、第一板体;102、第二板体;103、控制器;104、定位柱;105、凸形定位销;106、通槽;201、第二矩形套;202、矩形开口槽;301、u形板;302、第二工形轮;303、l形卡板;401、配重铁柱;501、第一电磁柱;502、盒门;503、收卷辊;504、铰链;701、连接条;702、联动杆;703、捆绑绳;704、插销;801、档杆;802、第一通孔;803、第一u形架;804、固定销;901、第一转动轴;1011、第一矩形套;1012、第二矩形槽;1013、u形限位槽;1014、矩形块;1021、第一矩形槽;1022、矩形板;1023、u形限位条;1041、连接板;1042、第二u形架;1043、第三电磁柱;1044、第二限位盘;1045、第二伸缩杆;1046、第三复位弹簧;1051、定位盘;1052、第二复位弹簧;1053、第三盲孔;1054、挂环;3011、第二通孔;3021、第二转动轴;3031、第一盲孔;5021、放绳槽;5022、铁块;5031、转动柱;5032、电机;
5033、第二盲孔;5034、第二电磁柱;8031、l形定位杆;8032、第三通孔;8033、推板;8034、第一伸缩杆;8035、第一限位盘;8036、第一复位弹簧;8041、固定块。
具体实施方式
57.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
58.请参阅图1、2、7和11所示,本发明为多旋翼无人机电网高空作业安全绳挂接装置,包括挂绳机构3、放绳盒5、无人机安装架6和第一工形轮9,第一工形轮9中同轴固接的第一转动轴901两端分别通过滚动轴承转动连接在第一固定板1和第二固定板2上,第一固定板1和第二固定板2的外侧均设置有u形活动杆8,u形活动杆8的两个竖直杆均滑动套合在第一固定板1外侧壁上的第一矩形套1011中或/和第二固定板2外侧壁上的第二矩形套201中;第一矩形套1011和第二矩形套201的设置可以对u形活动杆8的移动起到限位导向的作用;
59.上文中的同轴固接是指第一转动轴901与第一工形轮9呈同轴设置,并固定套接在第一工形轮9中;
60.u形活动杆8上端的横杆中部设置有第一通孔802,两个第一通孔802均用于联动杆702的滑动套接,联动杆702的一端通过连接条701与无人机安装架6上固设的电动伸缩杆7一端固定连接;
61.上述设置在使用时,工作人员通过远程控制装置控制电动伸缩杆7进行伸出,在电动伸缩杆7伸出的作用下,可以带动联动杆702逐一从两个u形活动杆8上的第一通孔802脱离,首先脱离的是与第一固定板1配合的u形活动杆8,再一次是第二固定板上的u形活动杆8,在重力的作用下,脱离的两个u形活动杆8依次滑动到第一工形轮9的下端,实现本装置与横担或电缆初步的配合。
62.请参阅图2、5和6所示,与第二固定板2活动配合的u形活动杆8的下端还配合设置有挂绳机构3,挂绳机构3包括u形板301、第二工形轮302和l形卡板303,第二工形轮302设置在u形板301的内侧,且第二工形轮302中同轴固接的第二转动轴3021两端分别通过滚动轴承转动连接在u形板301上;
63.上文中的同轴固接是指第二转动轴3021与第二工形轮302呈同轴设置,并固定套接在第二转动轴3021中;
64.u形板301封闭端的外壁上固定连接有l形卡板303,同时u形板301开口端的两竖直板上均设置有第二通孔3011,第二通孔3011中间隙配合有固定销804,该设置可以实现u形板301以固定销804为轴的转动,固定销804通过固定块8041固定连接在u形活动杆8的外侧壁上,第二矩形套201一侧壁上还设置有用于固定块8041滑动穿过的矩形开口槽202;
65.与第二固定板2活动配合的u形活动杆8的下端内壁上还设置有用于与l形卡板303上的凹槽卡合的档杆801;
66.第二工形轮302用于绳体4的饶合;
67.上述设置在使用时,当挂绳机构3移动到第二固定板2的下端之后,在缺少阻挡的作用下,挂绳机构3整体以固定销804为轴进行转动,u形板301一端上的l形卡板303搭接在档杆801上,此时,第二工形轮302移动到第一工形轮9的下方,绳体4饶合在第二工形轮302上以备使用,如附图3。
68.请参阅图5、6和10所示,固定销804上方的u形活动杆8两竖直杆之间通过第一u形架803固定连接,第一u形架803靠近u形活动杆8内部的一侧设置有推板8033,推板8033一侧面上的第一伸缩杆8034的一端滑动穿过第一u形架803与第一限位盘8035固定连接,第一限位盘8035的设置可以在第一伸缩杆8034的一端起到限位的作用,且第一u形架803和推板8033之间位置的第一伸缩杆8034上滑动套接有第一复位弹簧8036,第一复位弹簧8036的设置可以实现推板8033在水平方向上的移动;
69.第一u形架803的顶面中部还固定连接有l形定位杆8031,l形定位杆8031的自由端上设置有第三通孔8032,l形卡板303的自由端上设置有第一盲孔3031,第一盲孔3031和l形定位杆8031之间的定位,第三通孔8032之间通过插销704配合定位,该设置可以避免挂绳机构3发生偏移与第二固定板2出现摩擦而阻挡u形活动杆8的自由下落,l形卡板303和插销704通过捆绑绳703固定连接在u形活动杆8一侧的联动杆702上;
70.上述设置在使用时,当u形活动杆8与联动杆702脱离之后,u形活动杆8在重力的作用下,向第二固定板2的下端移动,当挂绳机构3移动到第二固定板2的下端时,因为捆绑绳703的限位,插销704与第一盲孔3031和第三通孔8032脱离,此时,在第一复位弹簧8036的复位作用下,推板8033将挂绳机构3向第二固定板2的一端推出。
71.请参阅图1、11和12所示,放绳盒5固定连接在无人机安装架6上,放绳盒5的内部设置有收卷辊503,收卷辊503固定套接在转动柱5031上,转动柱5031的两端转动连接在放绳盒5侧壁上,转动柱5031的一端穿过放绳盒5嵌合在电机5032的输出端中,且电机5032固定连接在放绳盒5的外侧壁上;
72.收卷辊503用于绳体4的饶合,且绳体4的两端均固定连接有配重铁柱401;
73.放绳盒5的下方设置有盒门502,盒门502的一侧通过铰链504与放绳盒5铰合,盒门502上还设置有用于绳体4穿过的放绳槽5021,且放绳槽5021离铰链504较远的一端为开口设置,该设置在盒门502打开之后,绳体4可以从放绳槽5021中脱离;
74.放绳槽5021开口端的一侧设置有铁块5022,且铁块5022正上方的放绳盒5外侧壁上固定安装有第一电磁柱501;
75.收卷辊503侧壁的中部位置设置有用于配重铁柱401滑动套接的第二盲孔5033,第二盲孔5033的内侧壁上固定安装有第二电磁柱5034,配重铁柱401的设置一方面可以实现绳体4的自动下滑,同时也便于与第二电磁柱5034的磁性吸附;
76.上述设置在使用时,通过电机5032带动收卷辊503转动的设置,可以实现饶合在第二工形轮302上的绳体4一端在配重铁柱401的作用下,向下移动,当绳体4的一端下放到一定位置之后,工作人员远程控制第一电磁柱501和第二电磁柱5034断电,在第一电磁柱501断电失磁的作用下,盒门502在重力作用下转动,在第二电磁柱5034断电失磁的作用下,第二电磁柱5034与配重铁柱401分离,绳体4的另一端快速从放绳盒5中脱离,实现绳体4的完全绕绳,绳体4最终饶合在第二工形轮302上。
77.请参阅图7
‑
9所示,第一固定板1主要由第一板体101和第二板体102沿上下方向拼接而成,第一板体101的底面中部设置有用于第一转动轴901配合的矩形板1022,矩形板1022两侧的第一板体101底面上对称设置有第一矩形槽1021;第二板体102的顶面中部设置有用于矩形板1022间隙配合的第二矩形槽1012,同时第二板体102的顶面上还设置有用于第一矩形槽1021间隙配合的矩形块1014;
78.矩形块1014和第一矩形槽1021配合位置的第一固定板1上沿水平方向设置有两端径尺小于中部径尺的通槽106,该设置指通槽106中部的直径大于通槽106两端的直径,通过该设置可以实现对凸形定位销105大直径一端的限位;
79.矩形块1014和第一矩形槽1021上的通槽106之间通过凸形定位销105配合定位;
80.位于凸形定位销105大径尺的一端通过第二复位弹簧1052固定连接在通槽106中部的定位盘1051上,且定位盘1051固定连接在通槽106内壁上,同时凸形定位销105的另一端固定连接有挂环1054,挂环1054的设置便于工作人员在组装时,将凸形定位销105从通槽106中拽出;
81.位于凸形定位销105大径尺的一端侧壁上还设置有第三盲孔1053,第三盲孔1053用于定位柱104一端的间隙配合,两个定位柱104的另一端均滑动穿过第二板体102延伸至第二板体102的上方连接同一连接板1041上;
82.连接板1041的顶面两侧还分别固定连接有第二伸缩杆1045,第二伸缩杆1045的另一端活动穿过第二u形架1042与第二限位盘1044固定连接,第二限位盘1044的设置可以对第二伸缩杆1045的一端起到限位的作用,第二u形架1042和连接板1041之间位置的第二伸缩杆1045上滑动套接有第三复位弹簧1046,第二u形架1042固定连接在第二板体102的顶面上;
83.两个第二伸缩杆1045之间位置的第二u形架1042上固定套接有第三电磁柱1043;
84.连接板1041的材质选用铁、钴、镍中的任意一种,该设置便于第三电磁柱1043在通电产生磁性的作用下,对连接板1041进行磁性吸附;
85.第二板体102靠近第一工形轮9的一侧面上还固定安装有控制器103,该设置可以对控制器103起到保护的作用,控制器103中固定安装有无线收发模块、储电模块和微型处理模块,微型处理模块通过传导线分别与无线收发模块、储电模块和第三电磁柱1043电性连接,无线收发模块的设置用于对无线信号的收发,储电模块用于对各电器元件工作提供电力,微型处理模块的设置用于对接受到的信号进行处理;
86.矩形板1022相邻的三个侧壁上设置有u形限位条1023,同时第二矩形槽1012的内侧壁上设置有用于u形限位条1023间隙配合的u形限位槽1013,该设置可以对第一板体101和第二板体102的连接起到定位的作用;
87.上述设置在使用时,当工作人员需要对该装置进行回收时,只需要远程向无线收发模块发送信号,在接受到信号之后,微型处理模块控制第三电磁柱1043通电,在通电产生磁性的作用下,第三电磁柱1043对连接板1041进行吸附,连接板1041带动定位柱104从第三盲孔1053中脱离,凸形定位销105在失去限位之后,在第二复位弹簧1052复位的作用下向通槽106内侧进行移动,矩形块1014和第一矩形槽1021之间失去连接分离,在重力的作用下,第一板体101自动脱离,实现本装置的拆卸。
88.以上仅为本发明的优选实施例,并不限制本发明,任何对前述各实施例所记载的技术方案进行修改,对其中部分技术特征进行等同替换,所作的任何修改、等同替换、改进,均属于在本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。