1.本发明涉及一种机器人,具体涉及一种高速长行程伸缩及旋转稳定性增强的机器人工作臂。
背景技术:
2.机器人工作臂在工作是,常常需要高速伸缩以及旋转,而现有的机器人工作臂,其会因为自身或零件以及负载的重量而产生不稳定的情况,这样,在高速伸缩以及旋转时,会振动和抖动;长行程更加剧了这一问题。且现有的机器人工作臂都是采用铝模铸件加工件来作为主安装体,需要开模具铸造,铸造件再进行加工,成本高。
技术实现要素:
3.为解决上述问题,本发明提出了一种一种高速长行程伸缩及旋转稳定性增强的机器人工作臂。
4.本发明的技术方案:一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,所述工作臂包括输出工作台以及主安装体,所述输出工作台滑动安装在主安装体上,所述主安装体上安装有驱动机构,驱动机构连接输出工作台,驱动输出工作台在主安装体上往复的来回直线平移运动;所述主安装体为一方铝管即下方铝管。
5.所述工作臂还包括另一方铝管即上方铝管,所述上方铝管滑动安装在下方铝管上,所述输出工作台与上方铝管并排、且在同一直线上往复的来回直线平移运动,所述上方铝管支撑并固定连接输出工作台上,所述上方铝管随输出工作台一起在下方铝管上往复的来回直线平移运动,于下方铝管一端伸缩。
6.所述输出工作台与下方铝管通过直线导轨组连接;所述直线导轨组包括两个直线导轨,两个直线导轨的轨道分别固定连接在下方铝管侧壁,两个直线导轨的滑块共同支撑并与输出工作台固定连接。
7.所述输出工作台架于下方铝管一端。
8.所述驱动机构由伺服电机、减速机与主同步带轮、从同步带轮、同步带连接构成,所述主同步带轮、从同步带轮分别旋转安装在下方铝管两端,所述同步带绕过主同步带轮、从同步带轮,其穿过下方铝管、并于输出工作台与下方铝管之间与输出工作台固定连接。
9.所述上方铝管与下方铝管通过外置双轴导轨连接;所述外置双轴导轨的轨道固定连接在上方铝管的下表面上,所述外置双轴导轨的滑块固定连接下方铝管上。
10.所述输出工作台与外置双轴导轨的滑块一前一后,构成所述上方铝管的两个支撑点。
11.两个方铝管均由方铝加工而成。
12.两个方铝管的规格均为100*50*5。
13.所述工作臂上安装有电动夹爪;所述电动夹爪固定连接在上方铝管的伸缩端,所
述上方铝管侧安装有尼龙拖链,于所述尼龙拖链内布线,连接电动夹爪。
14.本发明优点是,设计合理,构思巧妙,行程得以增加,满足机器人工作臂长行程的需求,且运行稳定,即使承载更大的轴向载荷,也不会出现振动和抖动;降低了对主安装体的精度需求,采用方铝管替代传统的铝模铸件加工件,省去开模具铸造长周期和大额的模具费用。
附图说明
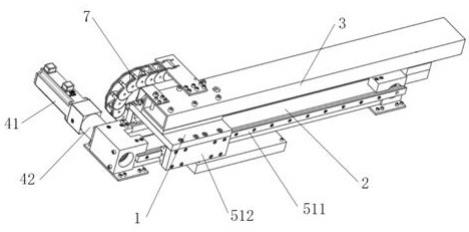
15.图1是机器人工作臂立体图。
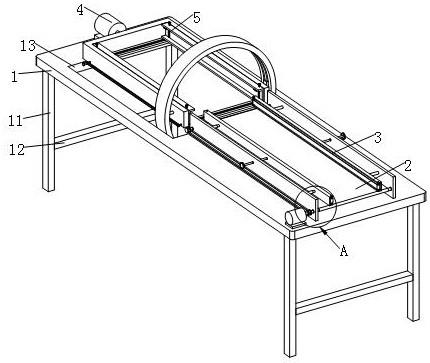
16.图2是机器人工作臂剖面示意图。
17.图中 输出工作台1、下方铝管2、上方铝管3、伺服电机41、减速机42、主同步带轮43、从同步带轮44、同步带45、直线导轨的轨道511、直线导轨的滑块512、外置双轴导轨的轨道61、外置双轴导轨的滑块62、尼龙拖链7。
具体实施方式
18.如图1
‑
2所示一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,所述工作臂包括输出工作台1以及主安装体,所述输出工作台1滑动安装在主安装体上,所述主安装体上安装有驱动机构,驱动机构连接输出工作台1,驱动输出工作台1在主安装体上往复的来回直线平移运动;所述主安装体为一方铝管即下方铝管2;所述工作臂还包括另一方铝管即上方铝管3,所述上方铝管3滑动安装在下方铝管2上,所述输出工作台1与上方铝管3并排、且在同一直线上往复的来回直线平移运动,所述上方铝管3支撑并固定连接输出工作台1上,所述上方铝管3随输出工作台1一起在下方铝管2上往复的来回直线平移运动,于下方铝管2一端伸缩;所述输出工作台1与下方铝管2通过直线导轨组连接;所述直线导轨组包括两个直线导轨,两个直线导轨的轨道511分别固定连接在下方铝管2侧壁,两个直线导轨的滑块512共同支撑并与输出工作台固定连接;所述输出工作台1架于下方铝管2一端;所述驱动机构由伺服电机41、减速机42与主同步带轮43、从同步带轮44、同步带45连接构成,所述主同步带轮43、从同步带轮44分别旋转安装在下方铝管2两端,所述同步带45绕过主同步带轮43、从同步带轮44,其穿过下方铝管2、并于输出工作台1与下方铝管2之间与输出工作台1固定连接;所述上方铝管3与下方铝管2通过外置双轴导轨连接;所述外置双轴导轨的轨道61固定连接在上方铝管3的下表面上,所述外置双轴导轨的滑块62固定连接下方铝管2上;所述输出工作台1与外置双轴导轨的滑块62一前一后,构成所述上方铝管3的两个支撑点;两个方铝管均由方铝加工而成;两个方铝管的规格均为100*50*5;所述上方铝管3侧安装有尼龙拖链7。
19.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
技术特征:
1.一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,所述工作臂包括输出工作台以及主安装体,所述输出工作台滑动安装在主安装体上,所述主安装体上安装有驱动机构,驱动机构连接输出工作台,驱动输出工作台在主安装体上往复的来回直线平移运动;其特征在于,所述主安装体为一方铝管即下方铝管;所述工作臂还包括另一方铝管即上方铝管,所述上方铝管滑动安装在下方铝管上,所述输出工作台与上方铝管并排、且在同一直线上往复的来回直线平移运动,所述上方铝管支撑并固定连接输出工作台上,所述上方铝管随输出工作台一起在下方铝管上往复的来回直线平移运动,于下方铝管一端伸缩。2.根据权利要求1所述一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,其特征在于,所述输出工作台与下方铝管通过直线导轨组连接;所述直线导轨组包括两个直线导轨,两个直线导轨的轨道分别固定连接在下方铝管侧壁,两个直线导轨的滑块共同支撑并与输出工作台固定连接。3.根据权利要求1所述的一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,其特征在于,所述输出工作台架于下方铝管一端;所述驱动机构由伺服电机、减速机与主同步带轮、从同步带轮、同步带连接构成,所述主同步带轮、从同步带轮分别旋转安装在下方铝管两端,所述同步带绕过主同步带轮、从同步带轮,其穿过下方铝管、并于输出工作台与下方铝管之间与输出工作台固定连接。4.根据权利要求1所述的一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,其特征在于,所述上方铝管与下方铝管通过外置双轴导轨连接;所述外置双轴导轨的轨道固定连接在上方铝管的下表面上,所述外置双轴导轨的滑块固定连接下方铝管上。5.根据权利要求4所述的一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,其特征在于,所述输出工作台与外置双轴导轨的滑块一前一后,构成所述上方铝管的两个支撑点。6.根据权利要求1所述的一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,其特征在于,两个方铝管均由方铝加工而成。7.根据权利要求1所述的一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,其特征在于,两个方铝管的规格均为100*50*5。8.根据权利要求1所述的一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,其特征在于,所述工作臂上安装有电动夹爪;所述电动夹爪固定连接在上方铝管的伸缩端,所述上方铝管侧安装有尼龙拖链,于所述尼龙拖链内布线,连接电动夹爪。
技术总结
本发明涉及一种高速长行程伸缩及旋转稳定性增强的机器人工作臂,所述工作臂包括输出工作台以及主安装体,所述输出工作台滑动安装在主安装体上,所述输出工作台在主安装体上往复的来回直线平移运动;所述主安装体为一方铝管即下方铝管;所述工作臂还包括另一方铝管即上方铝管,所述上方铝管滑动安装在下方铝管上,所述输出工作台与上方铝管并排、且在同一直线上往复的来回直线平移运动,所述上方铝管支撑并固定连接输出工作台上,所述上方铝管随输出工作台一起在下方铝管上往复的来回直线平移运动,于下方铝管一端伸缩。行程得以增加,满足机器人工作臂长行程的需求,且运行稳定,即使承载更大的轴向载荷,也不会出现振动和抖动。动。动。
技术研发人员:侯咸清
受保护的技术使用者:上海载科智能科技有限公司
技术研发日:2021.09.09
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。