技术特征:
1.一种基于数据融合的动态物体可视化三维重建方法,用于对目标场景内的目标物体进行可视化三维重建,收集不同目标场景下预设数量个目标物体对应的各个动态物体图像,其特征在于,获得动态物体图像中包含动态物体对应的数据信息,所述数据信息包括动态物体的地理坐标、以及动态物体运动数据,基于数据信息,通过以下步骤a至步骤d对目标物体进行动态可视化三维重建:步骤a、分别针对各个动态物体图像,基于各个动态物体场景,获得各个动态物体所对应的地理坐标,进一步获得对应场景所在地理坐标,得到各个场景分别所对应的场景三维模型,随后进入步骤b;步骤b、分别针对各个动态物体图像,提取动态物体图像中的各个动态物体,基于动态物体图像所对应的数据信息,获得各个动态物体所对应的三维点云数据,应用三维点云数据对各个动态物体进行三维重建,得到动态物体图像对应的动态物体三维模型,即获得该场景对应的各动态物体三维模型,随后进入步骤c;步骤c、分别针对各个场景对应的各个动态物体三维模型,提取对应动态物体三维模型中各个动态物体的特征点,基于动态物体的特征点对该动态物体三维模型与对应的场景三维模型进行匹配,将动态物体三维模型对应的动态物体及其特征点嵌入整合至匹配的场景三维模型中,获得包含动态物体及其场景的静态三维模型,进一步得到各个动态物体三维模型对应的各个静态三维模型,随后进入步骤d;步骤d、分别针对各个包含动态物体的静态三维模型,将动态物体的实时数据信息同步至静态三维模型中,并利用动态物体运动数据对静态三维模型中失真或丢失的状态数据进行模拟预测,获得对应的预测结果,利用预测结果对静态三维模型进行更新,得到包含动态物体的数据信息及其对应场景的瞬时三维模型。2.根据权利要求1所述的一种基于数据融合的动态物体可视化三维重建方法,其特征在于,动态物体对应的数据信息包括:动态物体的实时状态数据、动态物体坐标、动态物体所在场景的实时环境数据、所在场景边界坐标、以及所在场景的数字高程矢量信息。3.根据权利要求2所述的一种基于数据融合的动态物体可视化三维重建方法,其特征在于,所述步骤a中,分别针对各个动态物体图像,根据该动态物体图像中各个动态物体的坐标,利用场景边界对角两点的坐标,获得动态物体的参考平面,按照预设比例在参考平面的基础上建立区域平面模型,并以参考平面为中心建立平面模型对应的坐标系,遍历平面模型中动态物体所在场景的数字高程矢量信息,根据各个场景的数字高程矢量信息并结合场景边界坐标获得各个场景分别所对应的场景三维模型。4.根据权利要求3所述的一种基于数据融合的动态物体可视化三维重建方法,其特征在于,所述步骤b分别针对各个场景,执行以下步骤b1
‑
b2,获得各个场景中的动态物体三维模型:步骤b1、针对各个场景下的各个动态物体图像,提取各个动态物体图像中的各个动态物体,根据动态物体坐标,获得不同场景下的相同动态物体其所对应的三维点云数据,进一步得到各个动态物体图像对应的三维点云数据集,对三维点云数据集进行滤波、降噪处理,获得滤波、降噪处理后的三维点云数据集;步骤b2、分别针对各个动态物体图像,根据步骤b1所获滤波、降噪处理后的三维点云数据集,对该动态物体图像进行切片,获得该动态物体图像对应的顶视图、前视图、右视图的
截面信息,基于截面信息对动态物体图像进行三维重建,获得该动态物体图像对应的动态物体三维模型,即获得该场景中的动态物体三维模型。5.根据权利要求1所述的一种基于数据融合的动态物体可视化三维重建方法,其特征在于,所述利用动态物体的实时数据信息对该静态三维模型进行模拟预测,预测方法采用自回归滑动平均模型或向量ar模型预测模型,预测方法对短期内的历史数据进行训练并生成新的状态数据。6.根据权利要求5所述的一种基于数据融合的动态物体可视化三维重建方法,其特征在于,动态物体的实时状态数据信息包括:采集的运动物体的实时视频信息、动态物体自身采集的实时运动参数、采集的实时环境数据、预测的环境数据;对静态三维模型进行模拟预测时,采用以下优先级进行预测:当采集的动态物体的实时视频信息具有有效性时,预测结果由实时视频信息决定瞬时三维模型,由vr技术直接重建瞬时三维模型或者提取实时视频信息中的运动物体的状态信息并更新瞬时三维模型;当采集的运动物体的实时视频信息不具有有效性,但动态物体自身采集的实时运动参数具有有效性时,预测结果由动态物体自身采集的实时运动参数决定瞬时三维模型;当采集的运动物体的实时视频信息和动态物体自身采集的实时运动参数都不具有有效性时,但采集的实时环境数据具有有效性时,预测结果由采集的实时环境数据决定瞬时三维模型;当采集的运动物体的实时视频信息、动态物体自身采集的实时运动参数和采集的实时环境数据都不具有有效性时,预测结果由预测的环境数据决定瞬时三维模型。7.根据权利要求6所述的一种基于数据融合的动态物体可视化三维重建方法,其特征在于,动态物体为运动物体,包括离岸型风车、船舶;当动态物体为离岸型风车时,采集的实时运动参数包括风车转速、转向、偏航角、风车间距、离岸间距;采集的实时环境数据包括实时的环境风速、风向、天气预报参数;预测的环境数据包括气象预报部门发布的预测的风速、风向、以及根据风电场历史数据预测的风速、风向;当动态物体为船舶时,其采集的实时运动参数包括区域内各个船舶的实时坐标、航速、航向;采集的实时环境数据包括实时的环境风速、风向;预测的数据包括预测的航速、航向、航行坐标。8.一种基于数据融合的动态物体可视化三维重建系统,其特征在于,包括:一个或多个处理器;存储器,存储可被执行的指令,所述指令在通过所述一个或多个处理器执行时,使得所述一个或多个处理器执行以下操作,通过以下步骤a至步骤d对目标物体进行动态可视化三维重建:步骤a、分别针对各个动态物体图像,基于各个动态物体场景,获得各个动态物体所对应的地理坐标,进一步获得对应场景所在地理坐标,得到各个场景分别所对应的场景三维模型,随后进入步骤b;步骤b、分别针对各个动态物体图像,提取动态物体图像中的各个动态物体,基于动态物体图像所对应的数据信息,获得各个动态物体所对应的三维点云数据,应用三维点云数
据对各个动态物体进行三维重建,得到动态物体图像对应的动态物体三维模型,即获得该场景对应的各动态物体三维模型,随后进入步骤c;步骤c、分别针对各个场景对应的各个动态物体三维模型,提取对应动态物体三维模型中各个动态物体的特征点,基于动态物体的特征点对该动态物体三维模型与对应的场景三维模型进行匹配,将动态物体三维模型对应的动态物体及其特征点嵌入整合至匹配的场景三维模型中,获得包含动态物体及其场景的静态三维模型,进一步得到各个动态物体三维模型对应的各个静态三维模型,随后进入步骤d;步骤d、分别针对各个包含动态物体的静态三维模型,将动态物体的实时数据信息同步至静态三维模型中,并利用动态物体运动数据对静态三维模型中失真或丢失的状态数据进行模拟预测,获得对应的预测结果,利用预测结果对静态三维模型进行更新,得到包含动态物体的数据信息及其对应场景的瞬时三维模型。9.一种存储软件的计算机可读取介质,其特征在于,所述软件包括能通过一个或多个计算机执行的指令,所述指令在被所述一个或多个计算机执行时,执行如所述权利要求1
‑
7中任意一项所述可视化三维重建方法的操作。
技术总结
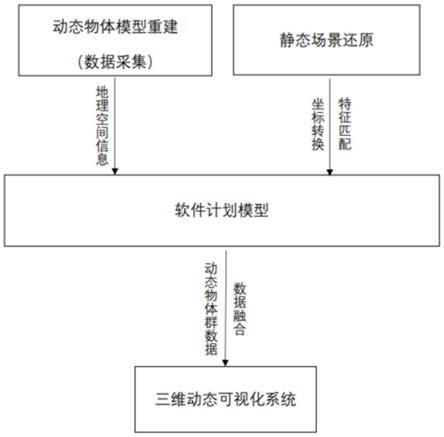
本发明公开了一种基于数据融合的动态物体可视化三维重建方法及系统,涉及三维场景重建技术领域,用于对场景内的动态物体进行可视化三维重建,通过收集预设数量个已知所属场景的动态物体图像,获得动态物体图像包含的数据信息,基于数据信息,依次构建场景的三维模型、动态物体的三维模型,将动态物体三维模型嵌入整合至匹配的场景三维模型中获得静态情况下的三维模型,基于静态三维模型更新数据,得到包含动态物体及其对应场景的瞬时三维模型,从而对待重建动态物体图像进行三维重建。通过本发明的技术方案,在保证数据采集精确的基础上获得一种便捷、快速、低成本且较为精确的可视化系统,降低了三维重建的成本,方便用户观测。方便用户观测。方便用户观测。
技术研发人员:戴尔晗 王钦 李梦茜
受保护的技术使用者:南京邮电大学
技术研发日:2021.09.10
技术公布日:2021/12/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。