1.本实用新型具体是一种新型用于索控式仿生手的手臂,涉及仿生手相关领域。
背景技术:
2.仿生手最早于1963年开发,是为了帮助受镇静催眠药撒利多胺危害的儿童,英国“i
‑
limb”仿生手是世界上最先进的走向市场的仿生手,有5根可自由活动的手指,其中索控式仿生手为仿生手中的一种,索控式仿生手需要配合相对应的手臂进行使用。
3.当索控式仿生手的手臂在使用时,为了保证手臂的灵活性,通常手臂为可弯曲设计,而手臂的转动多为一个自由度,其灵活性依然较低,同时手臂在损坏之后不便于进行拆卸维修,为工作带来不便。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种新型用于索控式仿生手的手臂。
5.本实用新型是这样实现的,构造一种新型用于索控式仿生手的手臂,该装置包括小臂和大臂,所述小臂设置于大臂顶部,所述连接机构设置于小臂和大臂上下对立面之间,所述连接机构包括连接壳、球体、固定块、放置腔、开口、滑动环、传动板、螺杆和转动机构,所述连接壳安装于大臂顶端面,所述球体相连接于小臂底端面中部,且球体活动伸入于固定块顶端面中部开设的放置腔内侧,所述固定块紧固于连接壳内侧底端面中部,所述开口贯通于固定块外侧顶部和放置腔内侧端面,所述滑动环内圈贴合于固定块侧表面,所述传动板相连接于滑动环左端面中部,且传动板滑动安装于连接壳内侧左端面,所述螺杆转动安装于连接壳内侧底部,且螺杆与传动板顶部左端开设的螺孔内侧螺纹配合,所述转动机构设置于螺杆底部。
6.优选的,所述转动机构包括电动马达、主动锥齿轮、从动锥齿轮和支撑环,所述电动马达锁合于连接壳内侧底端面,且电动马达左侧输出轴相连接于主动锥齿轮右端面中部,所述主动锥齿轮与从动锥齿轮相互啮合,所述从动锥齿轮顶端面中部固定连接于螺杆底端面,所述支撑环安装于连接壳内侧左端面底部,且支撑环内圈与螺杆外侧底部转动连接。
7.优选的,所述连接壳顶部内径大于球体外径,且连接壳与大臂侧表面相齐平。
8.优选的,所述固定块外侧顶部呈由下至上向外扩张状,且固定块外侧底部垂直于连接壳内侧底端面。
9.优选的,所述放置腔内侧为相对应于球体的球形结构,且放置腔内侧深度大于球体外径的一半。
10.优选的,所述开口开设有两个以上于固定块外侧顶部,且开口呈等间距环状分布。
11.优选的,所述滑动环内侧顶部为扩张的漏斗状,且滑动环内侧顶部相平行于固定块外侧顶部。
12.优选的,所述放置腔内侧顶部与固定块顶端面为弧形衔接。
13.本实用新型具有如下优点:本实用新型通过改进在此提供一种新型用于索控式仿生手的手臂,与同类型设备相比,具有如下改进:
14.优点1:本实用新型所述一种新型用于索控式仿生手的手臂,通过设置了连接机构于大臂和小臂之间,通过球体于放置腔内转动而带动小臂进行多自由度的转动,以及可通过滑动环脱离固定块外侧顶部,使得固定块外侧顶部受到自身弹力作用向外扩张,此时放置腔内侧脱离球体外表面,然后可将球体带动小臂进行拆卸,达到了提高手臂转动的自由度,以及便于手臂拆卸维修的有益效果。
15.优点2:本实用新型所述一种新型用于索控式仿生手的手臂,通过开口开设有两个以上于固定块外侧顶部,且开口呈等间距环状分布,使得多个开口将放置腔内侧均分为多份,便于放置腔内部进行收缩扩张,从而便于球体卡位和取出于放置腔内。
附图说明
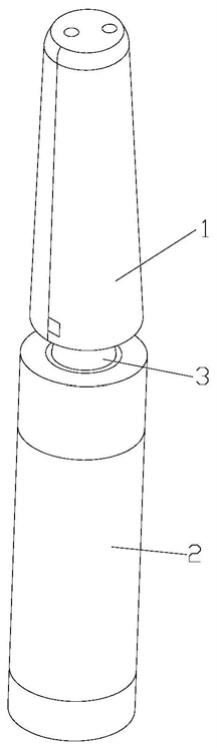
16.图1是本实用新型结构示意图;
17.图2是本实用新型的连接机构正视剖面结构示意图;
18.图3是本实用新型的滑动环连接结构示意图;
19.图4是本实用新型的固定块俯视结构示意图;
20.图5是本实用新型的图2中a处结构放大示意图。
21.其中:小臂
‑
1、大臂
‑
2、连接机构
‑
3、连接壳
‑
31、球体
‑
32、固定块
‑
33、放置腔
‑
34、开口
‑
35、滑动环
‑
36、传动板
‑
37、螺杆
‑
38、转动机构
‑
39、电动马达
‑
391、主动锥齿轮
‑
392、从动锥齿轮
‑
393、支撑环
‑
394。
具体实施方式
22.下面将结合附图1
‑
5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1,本实用新型通过改进在此提供一种新型用于索控式仿生手的手臂,包括小臂1和大臂2,小臂1设置于大臂2顶部。
24.请参阅图2至图4,本实用新型通过改进在此提供一种新型用于索控式仿生手的手臂,连接机构3设置于小臂1和大臂2上下对立面之间,连接机构3包括连接壳31、球体32、固定块33、放置腔34、开口35、滑动环36、传动板37、螺杆38和转动机构39,连接壳31安装于大臂2顶端面,连接壳31顶部内径大于球体32外径,且连接壳31与大臂2侧表面相齐平,便于球体32转动,以及提高连接壳31与大臂2连接的美观性,球体32相连接于小臂1底端面中部,且球体32活动伸入于固定块33顶端面中部开设的放置腔34内侧,固定块33紧固于连接壳31内侧底端面中部,固定块33外侧顶部呈由下至上向外扩张状,且固定块33外侧底部垂直于连接壳31内侧底端面,便于固定块33外侧顶部受到滑动环36的压力而收缩,放置腔34内侧为相对应于球体32的球形结构,且放置腔34内侧深度大于球体32外径的一半,便于球体32于放置腔34内侧转动,放置腔34内侧顶部与固定块33顶端面为弧形衔接,减少球体32转动过
程与放置腔34内侧顶部所形成的摩擦力,开口35贯通于固定块33外侧顶部和放置腔34内侧端面,开口35开设有两个以上于固定块33外侧顶部,且开口35呈等间距环状分布,便于开口35将放置腔34进行均分,从而便于放置腔34进行收缩或者扩张,滑动环36内圈贴合于固定块33侧表面,滑动环36内侧顶部为扩张的漏斗状,且滑动环36内侧顶部相平行于固定块33外侧顶部,便于滑动环36推动固定块33外侧顶部进行收缩,传动板37相连接于滑动环36左端面中部,且传动板37滑动安装于连接壳31内侧左端面,螺杆38转动安装于连接壳31内侧底部,且螺杆38与传动板37顶部左端开设的螺孔内侧螺纹配合,转动机构39设置于螺杆38底部。
25.请参阅图5,本实用新型通过改进在此提供一种新型用于索控式仿生手的手臂,转动机构39包括电动马达391、主动锥齿轮392、从动锥齿轮393和支撑环394,电动马达391锁合于连接壳31内侧底端面,且电动马达391左侧输出轴相连接于主动锥齿轮392右端面中部,主动锥齿轮392与从动锥齿轮393相互啮合,从动锥齿轮393顶端面中部固定连接于螺杆38底端面,支撑环394安装于连接壳31内侧左端面底部,且支撑环394内圈与螺杆38外侧底部转动连接。
26.本实用新型通过改进提供一种新型用于索控式仿生手的手臂,工作原理如下;
27.第一,首先将大臂2和小臂1的恰当位置连接于外部,并且大臂2的选择长度根据实际需要进行调节,当大臂2连接于残疾人恰当位置后,可实现大臂2带动小臂1进行连接,以及实现小臂1带动仿生手掌进行安装;
28.第二,当该仿生手臂在使用过程中,可通过将小臂1带动仿生手掌进行转动,从而实现对仿生手掌的角度调节,而小臂1在转动过程中带动球体32于放置腔34内侧进行转动,当小臂1位置转动后可对小臂1和仿生手掌进行固定;
29.第三,当需要将小臂1进行拆卸维修或者维护时,可通过启动电动马达391带动主动锥齿轮392和从动锥齿轮393进行转动,而从动锥齿轮393则带动螺杆38进行转动,从而实现传动板37在螺杆38的作用下垂直向下移动,并且传动板37带动相连接的滑动环36向下移动,当滑动环36向下移动脱离固定块33的外侧顶部后固定块33顶部受到的滑动环36限位力消失,此时固定块33外侧顶部受到自身弹力作用带动放置腔34向外扩张,放置腔34在向外扩张后脱离球体32侧表面,然后可将球体32带动小臂1进行拆卸维修或者维护。
30.本实用新型通过改进提供一种新型用于索控式仿生手的手臂,通过球体32于放置腔34内转动而带动小臂1进行多自由度的转动,以及可通过滑动环36脱离固定块33外侧顶部,使得固定块33外侧顶部受到自身弹力作用向外扩张,此时放置腔34内侧脱离球体32外表面,然后可将球体32带动小臂1进行拆卸,达到了提高手臂转动的自由度,以及便于手臂拆卸维修的有益效果,通过开口35开设有两个以上于固定块33外侧顶部,且开口35呈等间距环状分布,使得多个开口35将放置腔34内侧均分为多份,便于放置腔34内部进行收缩扩张,从而便于球体32卡位和取出于放置腔34内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。