1.本发明涉及光伏逆变器技术领域,尤其涉及一种三相光伏并网逆变器继电器合闸时序的控制方法。
背景技术:
2.光伏并网逆变器电路中,各点对大地(机壳地)都存在电位差,都存在等效电阻和等效电容,如光伏(pv)板正极和负极分别对大地的iso电阻和等效电容,直流母线(bus)正极和负极分别对大地的绝缘电阻和y电容,电磁干扰(emi)滤波器对大地的y电容,电网相电压采样电路及bus负极对大地电压采样电路中的分压电阻形成的对大地的等效电阻。这些电阻形成一个直流回路,继电器合闸前,这个直流回路决定了电路中各点对大地的电位差,此时,bus中点电位一般不等于大地电位。继电器合闸后,滤波用x电容cxa/cxb/cxc容值较大,形成低阻抗交流回路使得bus中点电位被三相电压钳制,此时bus中点电位约等于大地电位。这个合闸前后电位的变化在合闸瞬间,经共模电感和其它等效电容形成回路,可能产生数十至上百安培的共模冲击电流,可能会引起cpu死机或mos/igbt驱动电路误触发。继电器合闸前,滤波用x电容cxa/cxb/cxc无电压,继电器合闸后,滤波用x电容cxa/cxb/cxc电压约为相电压。这个合闸前后电压的变化在合闸瞬间,形成低阻抗回路,可能产生数十至上百安培的差模冲击电流给cxa/cxb/cxc充电,可能会引起继电器触点烧蚀甚至粘死。因此需要一种方法对继电器的合闸时序进行控制,以期减小共模冲击和差模冲击到最低程度甚至接近零。
技术实现要素:
3.本发明提供了一种三相光伏并网逆变器继电器合闸时序的控制方法,解决相关技术中存在的无法降低共模和差模的问题。
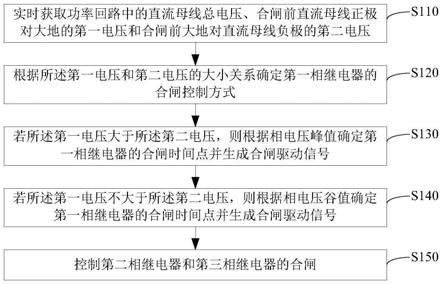
4.作为本发明的一个方面,提供一种三相光伏并网逆变器继电器合闸时序的控制方法,其中,包括:实时获取功率回路中的直流母线总电压、合闸前直流母线正极对大地的第一电压和合闸前大地对直流母线负极的第二电压,所述第一电压和所述第二电压的和等于所述直流母线总电压;根据所述第一电压和第二电压的大小关系确定第一相继电器的合闸控制方式;若所述第一电压大于所述第二电压,则根据相电压峰值确定第一相继电器的合闸时间点并生成合闸驱动信号;若所述第一电压不大于所述第二电压,则根据相电压谷值确定第一相继电器的合闸时间点并生成合闸驱动信号;控制第二相继电器和第三相继电器的合闸。
5.进一步地,当所述功率回路中的升压电路工作时,所述第一电压和所述第二电压均跟随所述直流母线总电压非线性变化。
6.进一步地,所述根据所述第一电压和第二电压的大小关系确定第一相继电器的合闸控制方式,包括:当继电器合闸前的初始状态中所述功率回路中的升压电路不工作时,判断所述第一电压和所述第二电压之间的大小关系。
7.进一步地,所述若所述第一电压大于所述第二电压,则根据相电压峰值确定第一相继电器的合闸时间点并生成合闸驱动信号,包括:若所述第一电压大于所述第二电压,根据合闸前继电器触点间第一压差与0的比较结果确定第一相继电器的合闸时间点,并生成合闸驱动信号,其中所述合闸前继电器触点间第一压差=直流母线总电压/2
‑
(第二电压 相电压峰值)。
8.进一步地,若所述合闸前继电器触点间第一压差大于或者等于0,则确定第一相继电器的合闸的最佳时间点为相电压波形的波峰位置所对应的时间点,并根据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号。
9.进一步地,若所述合闸前继电器触点间第一压差小于0,则控制所述功率回路中的升压电路工作,当所述合闸前继电器触点间第一压差跟随所述直流母线总电压增大而增大到等于0时,确定第一相继电器的合闸的最佳时间点为相电压波形的波峰位置所对应的时间点,并根据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号;若所述合闸前继电器触点间第一压差小于0,则控制所述功率回路中的升压电路工作,当所述直流母线总电压增大至预设最高电压,且所述合闸前继电器触点间第一压差仍小于0时,根据所述合闸前继电器触点间第一压差跟随所述直流母线总电压的变化过程中最接近0时所对应的直流母线总电压的值确定第一相继电器的合闸的最佳时间点,并根据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号。
10.进一步地,所述若所述第一电压不大于所述第二电压,则根据相电压谷值确定第一相继电器的合闸时间点并生成合闸驱动信号,包括:若所述第一电压不大于所述第二电压,根据合闸前继电器触点间第二压差与0的比较结果确定第一相继电器的合闸时间点,并生成第一相继电器的合闸驱动信号,其中所述合闸前继电器触点间第二压差=直流母线总电压/2
‑
(第二电压
‑
相电压峰值)。
11.进一步地,若所述合闸前继电器触点间第二压差小于或者等于0,则确定合闸的最佳时间点为相电压波形的波谷位置所对应的时间点,并根据相电压波形计算第一相继电器的合闸提前动作时间,生成第一相继电器的合闸驱动信号。
12.进一步地,若所述合闸前继电器触点间第二压差大于0,则控制所述功率回路中的升压电路工作,当所述合闸前继电器触点间第二压差跟随所述直流母线总电压增大而减小到等于0时,确定第一相继电器的合闸的最佳时间点为相电压波形的波谷位置所对应的时间点,并根据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号;若所述合闸前继电器触点间第二压差大于0,则控制所述功率回路中的升压电路工作,当所述直流母线总电压增大至预设最高电压,且所述合闸前继电器触点间第二压差仍大于0时,根据所述合闸前继电器触点间第二压差跟随所述直流母线总电压的变化过程中最接近0时所对应的直流母线总电压的值确定第一相继电器的合闸的最佳时间点,并根
据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号。
13.进一步地,所述第一相继电器为三相继电器中的任意一相。
14.本发明提供的三相光伏并网逆变器继电器合闸时序的控制方法,通过对功率回路中的s1组继电器进行单独控制,可以有效减小共模冲击和差模冲击,且并未增加硬件成本。
附图说明
15.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。
16.图1为功率回路的结构示意图。
17.图2为本发明提供的三相光伏并网逆变器继电器合闸时序的控制方法的流程图。
18.图3为本发明提供的第一电压大于第二电压且合闸前继电器触点间第一压差大于或者等于0时的电压波形图。
19.图4为本发明提供的第一电压大于第二电压、合闸前继电器触点间第一压差能够从小于0升到等于0且boost电路不工作时的电压波形图。
20.图5为本发明提供的第一电压大于第二电压、合闸前继电器触点间第一压差能够从小于0升到等于0且boost电路工作后的电压波形图。
21.图6为本发明提供的第一电压大于第二电压且合闸前继电器触点间第一压差小于0时的电压波形图。
22.图7为本发明提供的第一电压不大于第二电压且合闸前继电器触点间第二压差小于或者等于0时的电压波形图。
23.图8为本发明提供的第一电压不大于第二电压、合闸前继电器触点间第二压差能够从大于0减小到等于0且boost电路不工作时的电压波形图。
24.图9为本发明提供的第一电压不大于第二电压、合闸前继电器触点间第二压差能够从大于0减小到等于0且boost电路工作后的电压波形图。
25.图10为本发明提供的第一电压不大于第二电压且合闸前继电器触点间第二压差大于0时的电压波形图。
26.图11为本发明提供的第一相继电器刚刚合闸完成时的电压波形图。
27.图12为本发明提供的第一相继电器合闸完成,逆变电路开始工作后的电压波形图,直至可以进行第二相继电器和第三相继电器的合闸。
28.图13为图12所示的在0.2s至0.4s之间的图形的展开示意图。
具体实施方式
29.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互结合。下面将参考附图并结合实施例来详细说明本发明。
30.为了使本领域技术人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
31.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第
二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包括,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
32.图1所示为功率回路及各等效电容及电阻,光伏板(pv板)的路数可以为任意,在图1中仅仅以2路示意,每路光伏板的负极都连接在一起,并且和直流母线(bus)负极连接,共同形成功率地,同时也是逆变器采样和控制电路的信号地。每路pv板都带有升压电路(boost电路),boost电路工作时,等效电压源的输出电压为bus正极电压与该路pv电压(本发明实时仅讨论继电器合闸问题,此时pv的输出功率很低,电压约为开路电压,且可近似为电压源)的差值,boost电路不工作时,等效电压源的输出电压为零。由于二极管的作用,pv电压最高的那路除外,其它路pv的这个二极管永远都承受反压,相当于断开。pv电压最高的那路,boost电路工作时,bus电压高于pv电压,二极管承受反压,相当于断开,boost电路不工作时,二极管导通,bus电压约等于pv电压。二极管等效断开时,由于pv负极之间及bus负极永远连通,pv自身作为等效电压源,仍然可以通过pv正极对大地的iso电阻来影响继电器合闸前直流回路中各点对大地的电位差。该电路中可以直接测量到的电压包括bus电压(总电压、正半电压、负半电压共3个,仅使用总电压即可),各路pv电压,电网三相相电压,2组继电器中间点对n线电压(对应图中rsample,因为串联了隔直电容,只能采样交流分量),bus负极对大地电压。由于负极共连,且电网电压无直流分量,所以无论合闸前后,大地电位都介于bus正极与bus负极之间。继电器分为2组,本发明实施例所述合闸皆指对s1组中每个继电器的单独控制,s2组在这些操作之前已率先合闸(此时s1组皆断开,s2组合闸时无冲击),合闸s1组继电器时,先合某一任意相,后同时合另外两相。因此,关键是如何确定先合闸的第一相的时间节点。
33.在本实施例中提供了一种三相光伏并网逆变器继电器合闸时序的控制方法,图2是根据本发明实施例提供的三相光伏并网逆变器继电器合闸时序的控制方法的流程图,如图2所示,包括:s110、实时获取功率回路中的直流母线总电压、合闸前直流母线正极对大地的第一电压和合闸前大地对直流母线负极的第二电压,所述第一电压和所述第二电压的和等于所述直流母线总电压;在本发明实施例中,记直流母线总电压(即bus电压)为ubus,电路设计允许的最高bus电压为umax,由于电压平衡电路的作用,正半母线和负半母线电压相等,记为uhalf=0.5*ubus。记合闸前bus正极对大地的电压为第一电压u1(根据前述,永远为正值),boost电路工作后,u1随ubus非线性变化;记合闸前大地对bus负极电压为第二电压u2(根据前述,永远为正值),boost电路工作后,u2随ubus非线性变化,无论何时,u1 u2=ubus。记最先合闸的那一相的相电压波形为ua=upk*cos(ω*t),(典型值为upk=220v*1.41421,ω=2*pi*50 hz=314.16 rad/s),由于n线和pe线在低压配电tn
‑
s系统内是相连的,该相对大地的电压为ua,合闸前该相对bus负极的电压为u2 ua。因为只是先合闸某一相继电器,另外两相继电器还保持断开,所以合闸时没有差模冲击,只有共模冲击,用一种方法来控制合闸时间点,使得合闸时u2 ua接近uhalf,越接近共模冲击越小,甚至接近零。
34.应当理解的是,当所述功率回路中的升压电路工作时,所述第一电压和所述第二电压均跟随所述直流母线总电压非线性变化。
35.s120、根据所述第一电压和第二电压的大小关系确定第一相继电器的合闸控制方式;具体地,当继电器合闸前的初始状态中所述功率回路中的升压电路不工作时,判断所述第一电压和所述第二电压之间的大小关系。
36.继电器动作延迟时间较长,通常为若干毫秒,因此实际的继电器驱动信号要提前一定的时间由cpu发出。继电器动作延迟时间有一定的离散性,每次操作都不完全一样,而且随着使用时间的推移,动作延迟时间还会进一步变化,因此,合闸时间点应尽量选择在ua波形变化率小的时候,而不是变化率大的时候,对于正弦波形来说,峰值和谷值处的导数为零,过零点处的导数最大,应使合闸时间点靠近峰值处或靠近谷值处。
37.继电器合闸前的初始状态,boost电路不工作,由于并联了放电电阻,滤波用x电容cxa/cxb/cxc电压均为零。若u1>u2,则步骤s130,否则步骤s140。
38.s130、若所述第一电压大于所述第二电压,则根据相电压峰值确定第一相继电器的合闸时间点并生成合闸驱动信号;若所述第一电压大于所述第二电压,根据合闸前继电器触点间第一压差与0的比较结果确定第一相继电器的合闸时间点,并生成合闸驱动信号,其中所述合闸前继电器触点间第一压差=直流母线总电压
‑
(第二电压 相电压峰值)。
39.如图3所示,若所述合闸前继电器触点间第一压差大于或者等于0,则确定第一相继电器的合闸的最佳时间点为相电压波形的波峰位置所对应的时间点,并根据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号。
40.应当理解的是,记合闸前继电器触点间第一压差δu1=uhalf
‑
(u2 upk),若δu1>=0,合闸最佳时间点为相电压峰值处,合闸前继电器触点间压差为δu1(不能更接近零了),根据正弦波形计算合闸提前动作时间,然后驱动继电器动作。如图3所示。
41.若所述合闸前继电器触点间第一压差小于0,则控制所述功率回路中的升压电路工作,当所述合闸前继电器触点间第一压差跟随所述直流母线总电压增大而增大到等于0时,确定第一相继电器的合闸的最佳时间点为相电压波形的波峰位置所对应的时间点,并根据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号;在该实施方式中,若δu1<0,使boost电路工作,逐步升高ubus,由于u1和u2随ubus非线性变化,所以同时需要逐步记录δu1,如果随着ubus增大δu1增大到δu1=0,此时,合闸最佳时间点为相电压峰值处,合闸前继电器触点间压差为零(受继电器动作时影响较小),保持ubus,根据正弦波形计算合闸提前动作时间,然后驱动继电器动作。(如图4和图5所示,分别为boost电路不工作时和boost电路工作后)。
42.若所述合闸前继电器触点间第一压差小于0,则控制所述功率回路中的升压电路工作,当所述直流母线总电压增大至预设最高电压,且所述合闸前继电器触点间第一压差仍小于0时,根据所述合闸前继电器触点间第一压差跟随所述直流母线总电压的变化过程中最接近0时所对应的直流母线总电压的值确定第一相继电器的合闸的最佳时间点,并根据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号。
43.在该实施方式中,若ubus已经升高至umax,整个过程中一直δu1<0,根据记录到的δu1最接近零时的ubus值,重新控制ubus到该值,此时,合闸最佳时间点不是在相电压峰值处,而是在峰值前某处(或对称的位于峰值后某处),合闸前继电器触点间压差为零(受继电器动作时影响较大),根据正弦波形计算提前动作时间,然后驱动继电器动作。如图6所示。
44.s140、若所述第一电压不大于所述第二电压,则根据相电压谷值确定第一相继电器的合闸时间点并生成合闸驱动信号。
45.若所述第一电压不大于所述第二电压,根据合闸前继电器触点间第二压差与0的比较记过确定第一相继电器的合闸时间点,并生成第一相继电器的合闸驱动信号,其中所述合闸前继电器触点间第二压差=直流母线总电压
‑
(第二电压
‑
相电压峰值)。
46.若所述合闸前继电器触点间第二压差小于或者等于0,则确定合闸的最佳时间点为相电压波形的波谷位置所对应的时间点,并根据相电压波形计算第一相继电器的合闸提前动作时间,生成第一相继电器的合闸驱动信号。
47.在本发明实施例中,记合闸前继电器触点间第二压差δu2=uhalf
‑
(u2
‑
upk)。
48.若δu2<=0,合闸最佳时间点为相电压谷值处,合闸前继电器触点间压差为δu2(不能更接近零了),根据正弦波形计算合闸提前动作时间,然后驱动继电器动作。如图7所示。
49.若所述合闸前继电器触点间第二压差大于0,则控制所述功率回路中的升压电路工作,当所述合闸前继电器触点间第二压差跟随所述直流母线总电压增大而减小到等于0时,确定第一相继电器的合闸的最佳时间点为相电压波形的波谷位置所对应的时间点,并根据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号;在本发明实施例中,若δu2>0,使boost电路工作,逐步升高ubus,由于u1和u2随ubus非线性变化,所以同时需要逐步记录δu2,如果随着ubus增大δu2减小到δu2=0,此时,合闸最佳时间点为相电压谷值处,合闸前继电器触点间压差为零(受继电器动作时影响较小),保持ubus,根据正弦波形计算合闸提前动作时间,然后驱动继电器动作。如图8和图9分别表示boost电路不工作时和boost电路工作后。
50.若所述合闸前继电器触点间第二压差大于0,则控制所述功率回路中的升压电路工作,当所述直流母线总电压增大至预设最高电压,且所述合闸前继电器触点间第二压差仍大于0时,根据所述合闸前继电器触点间第二压差跟随所述直流母线总电压的变化过程中最接近0时所对应的直流母线总电压的值确定第一相继电器的合闸的最佳时间点,并根据相电压波形计算合闸提前动作时间,生成第一相继电器的合闸驱动信号。
51.在本发明实施例中,若ubus已经升高至umax,整个过程中一直δu2>0,根据记录到的δu2最接近零时的ubus值,重新控制ubus到该值,此时,合闸最佳时间点不是在相电压谷值处,而是在谷值前某处(或对称的位于谷值后某处),合闸前继电器触点间压差为零(受继电器动作时影响较大),根据正弦波形计算提前动作时间,然后驱动继电器动作。如图10所示。
52.需要说明的是,所述第一相继电器为三相继电器中的任意一相。
53.s150、控制第二相继电器和第三相继电器的合闸。
54.需要说明的是,在控制第一相继电器合闸之后,逆变器电路开始工作,直至逆变器
电路输出的电压波形的幅度达到电网电压波形的幅度时,控制第二相继电器和第三相继电器的合闸。此处应当理解的是,可以是第二相继电器和第三相继电器同时合闸,也可以是第二相继电器和第三相继电器先后合闸,具体合闸顺序不做限定。
55.本发明实施例提供的三相光伏并网逆变器继电器合闸时序的控制方法,通过对功率回路中的s1组继电器进行单独控制,可以有效减小共模冲击和差模冲击,且并未增加硬件成本。
56.需要说明的是,第一相的继电器合闸后,滤波用x电容cxa(假设a相为第一相)的容值和远大于等效电容ceq_bus( )和ceq_bus(
‑
),因此该滤波用x电容近似交流短路,其上的交流电路分量几乎为零,而相电压几乎全部施加在等效电容上。刚刚完成合闸时,滤波用x电容上的直流电压分量为零,由于直流回路的电阻分压作用,滤波用x电容上的直流电压分量将缓慢变化直至稳定(时间常数为秒级)。因此,第一相的继电器合闸后,invert电路应立即工作,使用spwm方式发出调制波形,幅值从零开始逐渐增大直至等于upk,因为invert电路工作时(invert电路是强电源,改变了直流回路),滤波用x电容上的直流电压分量一直能保持为零,所以继电器合闸后立即开启invert电路,就不会产生额外的冲击电流。据上述分析,刚开启invert电路时,滤波用x电容上的交流电压分量和直流电压分量都接近零,所以bus中点对大地的电压近似等于第一相的相电压,呈正弦波形变化,而bus滤波电容cbp/cbn都远大于等效电容ceq_bus( )和ceq_bus(
‑
),所以bus正极和bus负极对大地的电压也呈几乎同幅值的正弦波形变化(如下图),随着spwm调制波形的幅值越来越大,bus中点对大地的电压波形的交流分量等于第一相的相电压波形减去滤波用电容cxa上的交流电压分量(即spwm调制波形),等到spwm调制波形的幅值达到upk,bus中点对大地的电压波形接近零(直流分量和交流分量都接近零),此时,第二相和第三相滤波用x电容上的电压约等于第二相和第三相的相电压,第二相和第三相继电器触点两端的电压差接近零(交流波形瞬时值接近零),此时,合第二相和第三相继电器(不需要考虑继电器动作延迟时间)。
57.三相继电器全部合闸完成后,可以在合适的相位切换为svm调制,然后开始向电网发送有功功率和无功功率。
58.第一相可以为任意一相,可以按一定的规则轮换使用s1组的三个继电器,若电压采样电路(对应图rsample)接在滤波用x电容与s2组之间且s2组每个继电器可以单独控制,则可和s1组继电器互换控制方式,这样全部六个继电器都可以轮换使用,平摊合闸时对继电器触点的烧蚀。
59.根据上述分析,可以看出,各路pv正极和负极以及逆变器电路中各点对大地的绝缘电阻的阻值大的大小很不均匀时(即偏离理想情况比较大时),初始状态下bus中点电位非常远离大地电位,本发明所述方法的效果非常明显。
60.可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。