1.本技术涉及一种用于并指手术的训练设备,属于医疗器械领域。
背景技术:
2.并指是为较常见的手部先天性畸形,表现为相邻于指互相融合连为一体。根据受累手指的多少分为:两指并指、多指并指;根据手指间并连组织的多少分为:完全并指、不完全并指;根据并连组织的成分可分为:单纯软组织并指、骨性井指;还有伴有肌腱、骨关节异常的复杂并指等。并指常与并趾、多指(趾)、短指畸形、缺指畸形、束带综合症等其他手足畸形同时存在。有的并指为某些特殊综合症的一个表现,最常见的为同侧胸大肌发育不良或缺如的poland综合症(波兰综合症)、罕见的有apert综合症(尖头并指综合症)。
3.先天性并指的治疗需进行手术分离,进行手术的时间国内外有较大差异。国内老的观念是宜在3岁以后至学龄前的期间内施行为宜,理由是婴幼儿组织结构细小,不易分离,有可能使手术失败。但目前,随着手足显微外科的发展,手术操作技术的提高,国际上的观念主张早期手术,普遍在半岁开始手术。因为手的精细动作发育从3个月开始,到3岁时,手的精细动作已经发育完成。所以早期手术可以使孩子的手将来更灵活,可以擅长一些手工精细的职业,尤其是拇指和食指、无名指和小指并指以及有骨性连接的并指,更需早期手术分离,否则手指畸形会随年龄加大而加重,有的手指侧弯手术较晚就难以矫正。
4.但并指手术需要经验丰富的医生操作,未有过相关手术经验的医生或实习医生难以直接操作,需要经过大量训练和实操才能掌握准确、安全切分并指的技巧,而手术患者往往是幼童,手术难度又大,新医生往往无法短时间内掌握操作技巧,现有技术中尚未有针对并指手术的训练设备。
技术实现要素:
5.为了解决上述问题,本技术提出了一种用于并指手术的训练设备,针对目前新医生由于临床经验不足无法胜任并指手术,通过设置操作箱和并指模型,模拟还原并指手术过程,便于经验不足的医生进行训练,使医生快速成长,短期内就能具备手术实操水平。
6.根据本技术的一个方面,提供了一种用于并指手术的训练设备,其包括操作箱、并指模型、连接杆;所述操作箱的前侧设置开口,所述并指模型包括并指手掌模型和手臂模型,所述并指手掌模型包括手掌骨架和并指手掌套;所述连接杆设置在所述手臂模型的内部,所述手掌骨架通过所述连接杆与所述操作箱的一侧连接。
7.可选地,所述手掌骨架的关节处能够活动,所述并指手掌套中至少有两根相邻的手指侧壁连接。通过设置手掌骨架关节能够活动,以便于更真实还原患者手部,并且也便于手术中实时调整手指弯曲角度。
8.可选地,所述并指手掌模型和所述手臂模型能够拆卸连接,所述手臂模型为中空的腔体结构,所述手臂模型材质为软性材料。通过设置并指手掌模型与手臂模型能够拆卸连接,可以更换不同相邻手指并指或多指并指情况的模型,使医生能够得到更多并指情况
手术训练,以增加临床经验。
9.可选地,所述连接杆为挠性杆,所述挠性杆受力后能弯曲定型,用于模拟手术中并指手掌位置的变化和手臂弯曲的情况。通过设置能弯曲定型的挠性杆,以模拟手术中手臂弯曲和调整患者手部位置的情况。
10.可选地,所述操作箱包括操作布袋,所述操作布袋设置布袋口,所述操作布袋套设在所述手臂模型远离并指手掌模型的一端,所述手臂模型从所述布袋口穿出。
11.可选地,所述操作箱还包括托板,所述托板设置在所述操作箱的侧壁上,所述托板为沿所述并指模型延伸的板状结构,用于承托放置所述并指模型。通过设置托板使得并指模型能够放置稳固,模拟手术中固定患者手臂的装置。
12.可选地,所述操作箱的底部设置器械放置区。
13.可选地,所述器械放置区设置有与手术器械形状相匹配的凹槽,所述器械放置区中至少包括用于放置手术刀、消毒液、缝合线、绷带和麻醉药品的所述凹槽。通过设置器械放置区及凹槽,使得医生更方便的进行训练,也能减少手术器械丢失的情况。
14.可选地,所述操作箱的顶部设置为向外延伸的凸边,沿所述凸边的底部设置照明灯,所述操作箱的外壁设置照明开关。通过设置照明灯,以模拟手术室中的照明装置,也能使医生更清楚的观察并指模型情况。
15.可选地,所述操作箱还包括防护罩,所述防护罩的顶部与所述凸边边缘转动连接,所述防护罩用于隔离所述操作箱内部与外部空间。通过设置防护罩以避免操作箱内部受到污染或者落灰,便于清洁,模拟手术室中的无尘无菌环境。
16.本技术能产生的有益效果包括但不限于:
17.1.本技术所提供的用于并指手术的训练设备,针对目前新医生由于临床经验不足无法胜任并指手术,通过设置操作箱和并指模型,模拟还原并指手术过程,便于经验不足的医生进行训练,使医生快速成长,短期内就能具备手术实操水平。
18.2.本技术所提供的用于并指手术的训练设备,通过设置手掌骨架关节能够活动,以便于更真实还原患者手部,并且也便于手术中实时调整手指弯曲角度;通过设置能弯曲定型的挠性杆,以模拟手术中手臂弯曲和调整患者手部位置的情况;还通过设置并指手掌模型与手臂模型能够拆卸连接,可以更换不同相邻手指并指或多指并指情况的模型,使医生能够得到更多并指情况手术训练,以增加临床经验。
19.3.本技术所提供的用于并指手术的训练设备,通过设置器械放置区及凹槽,使得医生更方便的进行训练,也能减少手术器械丢失的情况;通过设置托板使得并指模型能够放置稳固,模拟手术中固定患者手臂的装置;通过设置照明灯,以模拟手术室中的照明装置,也能使医生更清楚的观察并指模型情况;还通过设置防护罩以避免操作箱内部受到污染或者落灰,便于清洁,模拟手术室中的无尘无菌环境。
附图说明
20.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
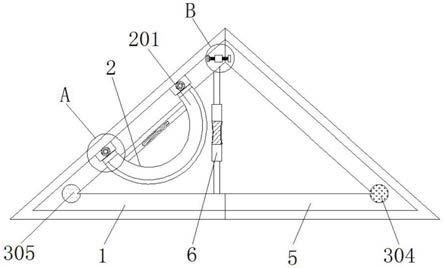
21.图1为本技术实施例涉及的用于并指手术的训练设备立体结构示意图;
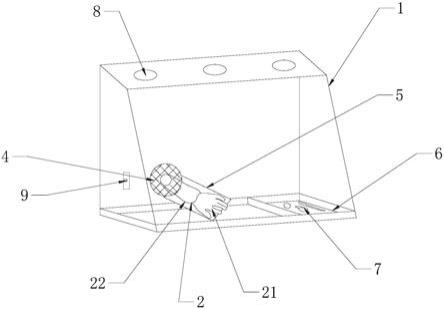
22.图2为本技术实施例涉及的用于并指手术的训练设备中并指模型结构示意图。
23.部件和附图标记列表:
24.1.操作箱;2.并指模型;21.并指手掌模型;22.手臂模型;211.手掌骨架;212.并指手掌套;3.连接杆;4操作布袋;5.托板;6.器械放置区;7.凹槽;8.照明灯;9.照明开关。
具体实施方式
25.为了更清楚的阐释本技术的整体构思,下面结合说明书附图以示例的方式进行详细说明。
26.为了能够更清楚地理解本技术的上述目的、特征和优点,下面结合附图和具体实施方式对本技术进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
27.在下面的描述中阐述了很多具体细节以便于充分理解本技术,但是,本技术还可以采用其他不同于在此描述的其他方式来实施,因此,本技术的保护范围并不受下面公开的具体实施例的限制。
28.另外,在本技术的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
29.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
30.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接,还可以是通信;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
31.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不是必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。
32.参考图1
‑
2,本技术的实施例公开了一种用于并指手术的训练设备,其包括操作箱1、并指模型2、连接杆3;操作箱1的前侧设置开口,并指模型2包括并指手掌模型21和手臂模型22,并指手掌模型21包括手掌骨架211和并指手掌套212;连接杆3设置在手臂模型22的内部,手掌骨架211通过连接杆3与操作箱1的一侧连接。
33.本技术的并指手术的训练设备针对目前新医生由于临床经验不足无法胜任并指
手术,通过设置操作箱1和并指模型2,模拟还原并指手术过程,便于经验不足的医生进行训练,使医生快速成长,短期内就能具备手术实操水平。
34.作为一种实施方式,手掌骨架211的关节处能够活动,并指手掌套212中至少有两根相邻的手指侧壁连接。通过设置手掌骨架211关节能够活动,以便于更真实还原患者手部,并且也便于手术中实时调整手指弯曲角度。
35.具体地,手掌骨架211的材质为聚氯乙烯,骨架关节处采用铰接的连接方式;并指手掌套212包括任意相邻两指并指、任意相邻三指并指的并指手掌套212,并指手掌套212的材质为硅胶。
36.作为一种实施方式,并指手掌模型21和手臂模型22能够拆卸连接,手臂模型22为中空的腔体结构,手臂模型22材质为软性材料。具体地,手臂模型22材质为硅胶,并指手掌模型21和手臂模型22通过卡扣连接。
37.通过设置并指手掌模型21与手臂模型22能够拆卸连接,可以更换不同相邻手指并指或多指并指情况的模型,使医生能够得到更多并指情况手术训练,以增加临床经验。
38.作为一种实施方式,连接杆3为挠性杆,挠性杆受力后能弯曲定型,用于模拟手术中并指手掌位置的变化和手臂弯曲的情况。通过设置能弯曲定型的挠性杆,以模拟手术中手臂弯曲和调整患者手部位置的情况。
39.具体的,挠性杆一端与操作箱1的内壁卡扣连接、焊接或螺纹连接,挠性杆的另一端与手掌骨架211的底部卡扣连接。
40.作为一种实施方式,操作箱1包括操作布袋4,操作布袋4设置布袋口,操作布袋4套设在手臂模型22远离并指手掌模型21的一端,手臂模型22从布袋口穿出。具体地,操作布袋4的材质为聚氯乙烯或尼龙。
41.作为一种实施方式,操作箱1还包括托板5,托板5设置在操作箱1的侧壁上,托板5为沿并指模型2延伸的板状结构,用于承托放置并指模型2。通过设置托板5使得并指模型2能够放置稳固,模拟手术中固定患者手臂的装置。具体地,托板5为长方体板状结构,材质为聚丙烯。
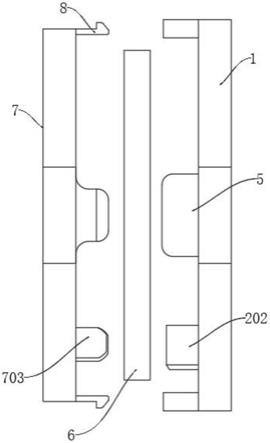
42.作为一种实施方式,操作箱1的底部设置器械放置区6。
43.作为一种优选地实施方式,器械放置区6设置有与手术器械形状相匹配的凹槽7,器械放置区6中至少包括用于放置手术刀、消毒液、缝合线、绷带和麻醉药品的凹槽7。通过设置器械放置区6及凹槽7,使得医生更方便的进行训练,也能减少手术器械丢失的情况。
44.进一步地,消毒液为医用酒精或碘伏,缝合线为普利林线,材质为聚丙烯。
45.作为一种实施方式,操作箱1的顶部设置为向外延伸的凸边,沿凸边的底部设置照明灯8,操作箱1的外壁设置照明开关9。通过设置照明灯8,以模拟手术室中的照明装置,也能使医生更清楚的观察并指模型2情况。具体地,照明开关9和照明灯8与外部电源电连接。
46.作为一种未示出的实施方式,操作箱1还包括防护罩,防护罩的顶部与凸边边缘转动连接,防护罩用于隔离操作箱1内部与外部空间。通过设置防护罩以避免操作箱1内部受到污染或者落灰,便于清洁,模拟手术室中的无尘无菌环境。
47.具体地,防护罩顶部与凸边边缘铰接,防护罩为透明的聚乙烯材质。
48.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于系统实
施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
49.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。