1.本实用新型涉及医用骨科植入物领域,具体涉及一种基于光纤传感器的智能骨科植入物及其监测系统。
背景技术:
2.骨科植入物产品,主要包括脊柱类产品,创伤类产品,人工关节类产品、神经外科产品(颅骨修复钛网、颅骨接骨板)、胸外科骨科用产品(如胸骨内固定植入物、肋骨内固定植入物产品等)等。常见的骨科植入物有椎间融合器、骨科接骨板、骨科钉棒固定系统(如脊柱后路椎弓根螺钉固定系统、脊柱前路钉棒固定系统等多种类别)、骨科钉
‑
板系统、髋关节假体、膝关节假体、人工椎体、髓内钉、肘关节假体、腕关节假体、肩关节假体、踝关节假体、螺钉、钛网、骨科固定针、骨科固定线缆、骨科固定铆定植入物、骨科外固定支架植入物(固定支架的钉和针为植入物,连接棒为2类医疗器械)、骨科个性化定制植入物、骨科肿瘤植入物产品、骨科植入物垫片等。骨科植入物种类包含但不限于上述产品种类和范畴;
3.例如骨科螺钉,临床中常用于固定骨科植入物以及内部骨折或脱位的固定,单独或与接骨板、钉棒系统等组合使用,通过直接拧入两个不同骨块或固定骨板等植入物实现骨折的固定,定位骨骼并促进骨愈合,常用的有松质骨螺钉、皮质骨螺钉、骨栓和空心螺钉、髓内钉、椎弓根螺钉等等。
4.骨科植入物植入人体以后,随着患者骨愈合过程或患者康复过程中,骨科植入物(例如螺钉)可能会出现弯曲变形、应力集中、松动、退出、移位、断裂等失效情况,造成例如接骨板断裂、螺钉断裂松动等手术失败,严重者常需要二次翻修手术。现有的骨科植入物不能自我监测植入物失效,也不能对植入物失效进行预警,是当前骨科植入物的一大显著不足;
5.植入物失效可能是由于微动、应力集中等长时间作用的一个累积过程,如松动、变形、移位、退钉、断裂等,植入物失效也可能是一个瞬时作用力超过了植入物的负荷,瞬时形成松动、变形、移位、退钉、断裂等。
6.在现有的技术条件和医疗模式下,骨科患者术后,在3月、6月或规定的时间节点到医院进行随访,医生对患者进行体格检查以及患者进行x光、ct等辅助检查,在回归医院的随访过程中,医生可以通过物理检测或辅助检查可以发现植入物失效与否。
7.但现有技术存在如下不足:
8.1、不能实时的连续的对植入物进行监测,存在遗漏风险;
9.2、不能对植入物失效进行预警和早期干预,在累积过程中,早期发现、早期预警,则可能避免植入物失效的严重和恶化,从而避免患者手术失败或二次手术;
10.3、不能精准的对植入物失效状态进行判定,通过物理体格检查、x光和ct检查对植入物状态进行判定比较滞后,并且是间接的检测,误判风险较高,对松动、变形、移位等失效的早期阶段误判率更高,也严重依赖于临床医生和放射科诊断医生的经验判断;
11.4、现有的技术手段存在辐射危害;
12.5、现有的技术手段不能自我监测,不能远程监测;患者往返医院多次检查,存在误工、交通、检查费等多种费用,不利于降低医疗负担。
13.因此,当前骨科植入物尚需一种能够实现自我实时远程智能监测的、能够对植入物失效状态进行精确判断,并且根据相应状态进行预警的智能骨科植入物设计。
技术实现要素:
14.本实用新型的目的是提供一种基于光纤传感器的智能骨科植入物及其监测系统,实现了对骨科植入物状态的实时精确判断,并根据骨科植入物状态进行相应预警提示,极大地提高了骨科植入物的使用安全性。
15.本实用新型采取如下技术方案实现上述目的,基于光纤传感器的智能骨科植入物,包括植入物本体,所述植入物本体表面设置有多个均匀分布的凹槽,所述凹槽与植入物本体轴线平行,每个凹槽内均设置有光纤传感器,植入物本体内部设置有集成模块以及外接天线,所述集成模块包括通信单元以及mems单元,光纤传感器与mems单元连接,外接天线与通信单元连接,所述mems单元用于实时检测光纤传感器的光信号数据,并将光信号数据发送给通信单元,通信单元将光信号数据发送给外部终端。
16.进一步的是,所述骨科植入物为螺钉,所述螺钉包括钉头以及螺杆,所述螺杆表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,钉头内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
17.进一步的是,所述钉头内部设置集成模块以及电源模块的方式包括:钉头内部开设有中空的腔体,集成模块以及电源模块设置在腔体中。所述钉头内部设置外接天线的方式包括:钉头内部设置有第一孔洞,第一孔洞与钉头水平面平行并且与腔体连接,外接天线设置在第一孔洞中。
18.进一步的是,所述骨科植入物为固定针,所述固定针表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,固定针两端设置有固定装置,固定装置用于固定光纤传感器,固定针一端的固定装置中设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
19.进一步的是,所述骨科植入物为髓内棒,所述髓内棒螺孔两侧均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,髓内棒螺孔两侧内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
20.进一步的是,所述髓内棒螺孔两侧内部设置集成模块以及电源模块的方式包括:髓内棒螺孔两侧内部设置有中空的腔体,集成模块以及电源模块设置在腔体中。所述髓内棒螺孔两侧内部设置外接天线的方式包括:髓内棒螺孔两侧内部设置有第一孔洞,第一孔洞与髓内棒轴线垂直并且与腔体连接,外接天线设置在第一孔洞中。
21.进一步的是,所述骨科植入物为肩关节假体,所述肩关节假体包括股柄以及球头,股柄表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,球头内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
22.进一步的是,所述在肩关节假体球头内部设置集成模块以及电源模块的方式包括:球头内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述在肩关节假体球头内部设置外接天线的方式包括:球头内部设置第一孔洞,第一孔洞与股柄轴线平行并
且与腔体连接,外接天线设置在第一孔洞中。
23.进一步的是,所述骨科植入物为髋关节假体,所述髋关节假体包括股柄以及球头,股柄表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,球头内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
24.进一步的是,所述在髋关节假体球头内部设置集成模块以及电源模块的方式包括:球头内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述在髋关节假体球头内部设置外接天线的方式包括:球头内部设置第一孔洞,第一孔洞与股柄轴线平行并且与腔体连接,外接天线设置在第一孔洞中。
25.进一步的是,所述骨科植入物为腕关节假体,所述腕关节假体包括股柄以及球头,股柄表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,球头内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
26.进一步的是,所述在腕关节假体球头内部设置集成模块以及电源模块的方式包括:球头内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述在腕关节假体球头内部设置外接天线的方式包括:球头内部设置第一孔洞,第一孔洞与股柄轴线平行并且与腔体连接,外接天线设置在第一孔洞中。
27.进一步的是,所述骨科植入物为骨科固定支架,所述骨科固定支架包括固定钢针以及固定连杆,所述固定钢针以及固定连杆表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,固定钢针以及固定连杆内部设置有集成模块、电源模块以及外接天线。
28.进一步的是,所述固定钢针以及固定连杆内部设置集成模块以及电源模块的方式包括:固定钢针以及固定连杆内部设置有中空的腔体,集成模块以及电源模块设置在腔体中。所述固定钢针以及固定连杆内部设置外接天线的方式包括:固定钢针以及固定连杆内部设置有第一孔洞,第一孔洞与固定钢针或固定连杆的轴线垂直并且与腔体连接,外接天线设置在腔体中。
29.进一步的是,所述骨科植入物为钉棒系统,所述钉棒系统包括弓根钉以及棒,所述棒的表面以及弓根钉螺杆表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,棒的内部以及弓根钉螺杆内部设置有集成模块、电源模块以及外接天线。
30.进一步的是,所述棒的内部以及弓根钉螺杆内部设置集成模块以及电源模块的方式包括:棒的内部以及弓根钉螺杆内部设置有中空的腔体,集成模块以及电源模块设置在腔体中。所述棒的内部以及弓根钉螺杆内部设置外接天线的方式包括:棒的内部以及弓根钉螺杆内部设置有第一孔洞,第一孔洞与棒的轴线或弓根钉螺杆轴线平行,外接天线设置第一孔洞中。
31.进一步的是,所述骨科植入物为接骨板,所述接骨板螺孔两侧均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,接骨板螺孔两侧内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
32.进一步的是,所述接骨板螺孔两侧内部设置集成模块以及电源模块的方式包括:接骨板螺孔两侧内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述接骨板螺孔两侧内部设置外接天线的方式包括:接骨板螺孔两侧内部设置有第一孔洞,第一孔洞与腔体连接并且第一孔洞与接骨板轴线垂直并且与腔体连接,外接天线设置在第一孔洞
中。
33.进一步的是,所述骨科植入物为椎间盘假体,所述椎间盘假体包括第一椎面以及第二椎面,第一椎面以及第二椎面表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,第一椎面以及第二椎面内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
34.进一步的是,所述在第一椎面以及第二椎面内部设置集成模块以及电源模块的方式包括:第一椎面以及第二椎面内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述在第一椎面以及第二椎面内部设置外接天线的方式包括:第一椎面以及第二椎面内部设置有第一孔洞,第一孔洞与腔体连接并且第一孔洞与第一椎面或第二椎面轴线垂直,外接天线设置在第一孔洞中。
35.进一步的是,所述骨科植入物为膝关节假体,所述膝关节假体的人工半月板表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,人工半月板内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
36.进一步的是,所述人工半月板内部设置集成模块以及电源模块的方式包括:人工半月板内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述人工半月板内部设置外接天线的方式包括:人工半月板内部设置有第一孔洞,第一孔洞与腔体连接并且第一孔洞与人工半月板水平面平行,外接天线设置在第一孔洞中。
37.基于光纤传感器的智能骨科植入物监测系统,包括智能终端以及上述所述的基于光纤传感器的智能骨科植入物,所述智能终端与通信单元无线连接,所述智能终端用于根据接收的光纤传感器的光信号数据对植入物的受力进行分析,判断出植入物的状态,并根据植入物状态进行相应预警提示。
38.本实用新型在骨科植入物表面设置多个凹槽,凹槽中设置光纤传感器,光纤传感器直接与骨科植入物接触,能够直接感应植入物受力处的形变,精确度以及灵敏度更高;集成模块设置植入物内部,能够提高其安全性,并且在信号传输时,增加了外接天线,外接天线与通信单元连接,能够提高信号的质量与传输距离。
附图说明
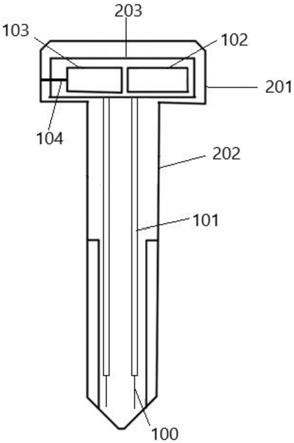
39.图1是本实用新型智能螺钉的结构示意图。
40.图2是本实用新型固定针第一结构示意图。
41.图3是本实用新型固定针第二结构示意图。
42.图4是本实用新型髓内棒结构示意图。
43.图5是本实用新型肩关节假体结构示意图。
44.图6是本实用新型髋关节假体结构示意图。
45.图7是本实用新型腕关节假体结构示意图。
46.图8是本实用新型骨科固定支架结构示意图。
47.图9是本实用新型钉棒系统结构示意图。
48.图10是本实用新型接骨板结构示意图。
49.图11是本实用新型椎间盘假体结构示意图。
50.图12是本实用新型膝关节假体结构示意图。
51.附图中,100为光纤传感器,101为光纤传感器保护套,102为mems单元,103为通信单元,104为外接天线,201为钉头,202为螺杆,203为钉头中的中空腔体,300为固定针,301为固定装置,302为固定针表面的凹槽,400为髓内棒,401为髓内棒上的螺孔,402为髓内棒上的凹槽,501为球头,502为内衬,503为股柄,601为固定钢针,602为固定连杆,603为固定钢针或固定连杆上的凹槽,701为弓根钉,702为棒,703为弓根钉螺杆或棒表面的凹槽,704为棒上的螺孔,800为接骨板,801为接骨板上的螺孔,901为第一椎面,902为第二椎面,903为椎核,904为球面轴承,905为基座,1001为股骨假体组件,1002为人工半月板,1003为胫骨假体组件。
具体实施方式
52.本实用新型基于光纤传感器的智能骨科植入物,包括植入物本体,所述植入物本体表面设置有多个均匀分布的凹槽,所述凹槽与植入物本体轴线平行,每个凹槽内均设置有光纤传感器,植入物本体内部设置有集成模块以及外接天线,所述集成模块包括通信单元以及mems(micro
‑
electro
‑
mechanicalsystem)单元,光纤传感器与mems单元连接,外接天线与通信单元连接,所述mems单元用于实时检测光纤传感器的光信号数据,并将光信号数据发送给通信单元,通信单元将光信号数据发送给外部终端。
53.光纤传感器是一种将被测对象的状态转变为可测的光信号的传感器。光纤传感器的工作原理是将光源入射的光束经由光纤送入调制器,在调制器内与外界被测参数的相互作用,使光的光学性质如光的强度、波长、频率、相位、偏振态等发生变化,成为被调制的光信号,再经过光纤送入光电器件、经解调器后获得被测参数。
54.植入物受力发生形变,其表面上的光纤传感器随之一起受力形变,例如可能发生弯曲或者断裂等情况,形变后光纤传感器的光信号会发生损耗,引起光相位、光强等参数的变化,通过测量相应光信号参数或者其光信号损耗值的变化,就可以对植入物的受力进行分析,判断出植入物受力下的实时状态。
55.骨科植入物可以为螺钉,所述螺钉包括钉头以及螺杆,所述螺杆表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,钉头内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
56.钉头内部设置集成模块以及电源模块的方式包括:钉头内部开设有中空的腔体,集成模块以及电源模块设置在腔体中。所述钉头内部设置外接天线的方式包括:钉头内部设置有第一孔洞,第一孔洞与钉头水平面平行并且与腔体连接,外接天线设置在第一孔洞中。
57.骨科植入物可以为固定针,所述固定针表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,固定针两端设置有固定装置,固定装置用于固定光纤传感器,固定针一端的固定装置中设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
58.骨科植入物可以为髓内棒,所述髓内棒螺孔两侧均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,髓内棒螺孔两侧内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
59.髓内棒螺孔两侧内部设置集成模块以及电源模块的方式包括:髓内棒螺孔两侧内
部设置有中空的腔体,集成模块以及电源模块设置在腔体中。所述髓内棒螺孔两侧内部设置外接天线的方式包括:髓内棒螺孔两侧内部设置有第一孔洞,第一孔洞与髓内棒轴线垂直并且与腔体连接,外接天线设置在第一孔洞中。
60.骨科植入物可以为肩关节假体,所述肩关节假体包括股柄以及球头,股柄表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,球头内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
61.在肩关节假体球头内部设置集成模块以及电源模块的方式包括:球头内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述在肩关节假体球头内部设置外接天线的方式包括:球头内部设置第一孔洞,第一孔洞与股柄轴线平行并且与腔体连接,外接天线设置在第一孔洞中。
62.骨科植入物可以为髋关节假体,所述髋关节假体包括股柄以及球头,股柄表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,球头内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
63.在髋关节假体球头内部设置集成模块以及电源模块的方式包括:球头内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述在髋关节假体球头内部设置外接天线的方式包括:球头内部设置第一孔洞,第一孔洞与股柄轴线平行并且与腔体连接,外接天线设置在第一孔洞中。
64.骨科植入物可以为腕关节假体,所述腕关节假体包括股柄以及球头,股柄表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,球头内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
65.在腕关节假体球头内部设置集成模块以及电源模块的方式包括:球头内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述在腕关节假体球头内部设置外接天线的方式包括:球头内部设置第一孔洞,第一孔洞与股柄轴线平行并且与腔体连接,外接天线设置在第一孔洞中。
66.骨科植入物可以为骨科固定支架,所述骨科固定支架包括固定钢针以及固定连杆,所述固定钢针以及固定连杆表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,固定钢针以及固定连杆内部设置有集成模块、电源模块以及外接天线。
67.固定钢针以及固定连杆内部设置集成模块以及电源模块的方式包括:固定钢针以及固定连杆内部设置有中空的腔体,集成模块以及电源模块设置在腔体中。所述固定钢针以及固定连杆内部设置外接天线的方式包括:固定钢针以及固定连杆内部设置有第一孔洞,第一孔洞与固定钢针或固定连杆的轴线垂直并且与腔体连接,外接天线设置在腔体中。
68.骨科植入物可以为钉棒系统,所述钉棒系统包括弓根钉以及棒,所述棒的表面以及弓根钉螺杆表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,棒的内部以及弓根钉螺杆内部设置有集成模块、电源模块以及外接天线。
69.棒的内部以及弓根钉螺杆内部设置集成模块以及电源模块的方式包括:棒的内部以及弓根钉螺杆内部设置有中空的腔体,集成模块以及电源模块设置在腔体中。所述棒的内部以及弓根钉螺杆内部设置外接天线的方式包括:棒的内部以及弓根钉螺杆内部设置有第一孔洞,第一孔洞与棒的轴线或弓根钉螺杆轴线平行,外接天线设置第一孔洞中。
70.骨科植入物可以为接骨板,所述接骨板螺孔两侧均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,接骨板螺孔两侧内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
71.接骨板螺孔两侧内部设置集成模块以及电源模块的方式包括:接骨板螺孔两侧内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述接骨板螺孔两侧内部设置外接天线的方式包括:接骨板螺孔两侧内部设置有第一孔洞,第一孔洞与腔体连接并且第一孔洞与接骨板轴线垂直并且与腔体连接,外接天线设置在第一孔洞中。
72.骨科植入物可以为椎间盘假体,所述椎间盘假体包括第一椎面以及第二椎面,第一椎面以及第二椎面表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,第一椎面以及第二椎面内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
73.在第一椎面以及第二椎面内部设置集成模块以及电源模块的方式包括:第一椎面以及第二椎面内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述在第一椎面以及第二椎面内部设置外接天线的方式包括:第一椎面以及第二椎面内部设置有第一孔洞,第一孔洞与腔体连接并且第一孔洞与第一椎面或第二椎面轴线垂直,外接天线设置在第一孔洞中。
74.骨科植入物可以为膝关节假体,所述膝关节假体的人工半月板表面均匀分布有多个凹槽,凹槽中设置有光纤传感器,光纤传感器由保护套包裹,人工半月板内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
75.人工半月板内部设置集成模块以及电源模块的方式包括:人工半月板内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;所述人工半月板内部设置外接天线的方式包括:人工半月板内部设置有第一孔洞,第一孔洞与腔体连接并且第一孔洞与人工半月板水平面平行,外接天线设置在第一孔洞中。
76.基于光纤传感器的智能骨科植入物监测系统,包括智能终端以及上述所述的基于光纤传感器的智能骨科植入物,所述智能终端与通信单元无线连接,所述智能终端用于根据接收的光纤传感器的光信号数据对植入物的受力进行分析,判断出植入物的状态,并根据植入物状态进行相应预警提示。
77.实施案例1:植入物为螺钉,螺钉用于将钢板等外固定与骨连接或者将骨折块连接起来;应用于稳定新的骨折、翻修手术、关节融合、以及重建足,脚踝和脚趾的小骨;
78.例如:髁、踝、粗隆或结节的撕裂骨折(如股、胫骨内、外髁骨折,踝部骨折,尺骨鹰嘴突骨折、肱骨大结节骨折,胫骨结节骨折等),特别是累及关节面者。这些骨折的骨片小,肌牵引力较大,易移位,外固定难以达到保持复位的目的,螺钉固定最为合适;或手法复位失败的长骨螺旋骨折、长斜骨折以及蝶形骨折;或股骨颈基底部骨折,使用加压松质骨螺钉加垫圈固定,可以起固定与加压双重作用。
79.根据结构设计可以分为普通螺钉、锁定螺钉、无头螺钉以及空心螺钉等;
80.根据材料可以分为钛钉、不锈钢钉以及生物可吸收螺钉;
81.根据应用部位可以分为皮质骨螺钉、松质骨螺钉;
82.根据螺钉功能可以分为钢板螺钉、拉力螺钉、位置螺钉、交锁钉、复位螺钉等;
83.其中皮质骨螺钉全长都有螺纹,通常有下列直径:4.5mm、3.5mm、2.7mm、2mm和
1.5mm。皮质骨螺钉可用作位置螺钉也可用作拉力螺钉。在用作拉力螺钉时,将近侧皮质扩孔,即可在骨折块间产生加压作用。
84.松质骨螺钉有较大的螺纹,可以更牢固地抓住较软的骨松质,因此更常被用于干骺端。松质骨螺钉有6.5mrn和4mm两种直径、螺纹长度有16mm和32mm两种。空心骨松质螺钉有6.5mm、7.0mm、7.3mm直径,螺纹长度有16mm和32mm两种。无论螺钉有多长,只有这两种螺纹长度。踝螺钉为一种4.5mm螺钉,也包括在此组螺钉内,但它是唯一具有自攻环钻钉尖(self
‑
tappingtrephinetip)的螺钉。选择正确的直径钻头,并钻孔攻丝是确保螺钉固定牢固的关键。这类螺钉通常要用塑料和金属垫圈,以便重新连接撕裂韧带或通过为螺钉提供较大的压迫骨皮质的接触面。以给骨折块加压。
85.锁定螺钉是钉帽带有螺纹的自攻螺钉,其安装时需要精确的预钻孔。从而与钢板锁定,才能达到紧密固定,置入时需要特殊的改锥。
86.拉力螺钉又称半螺纹螺钉,所起的作用不是特指某一种螺钉,可以是空心螺钉也可以是普通螺钉,股骨颈骨折一般使用空心螺钉进行固定,同时要求具有拉力,在骨片间加压的最有效的方式是使用拉力螺钉,拉力螺钉的方向垂直骨折线,可带来最大的折块间加压,大部分情况下可以达到拉力螺钉的最佳功能,当螺钉不与骨折线垂直时,在拧紧时会产生剪力使骨折块移位。
87.另外还有一种特殊的种植牙螺钉。种植牙螺钉是一种特殊的螺钉,常用于口腔修复外科,是一种以植入骨组织内的下部结构为基础来支持、固位上部牙修复体的缺牙修复方式。它包括下部的支持种植体(dentalimplant)和上部的牙修复体(dentalprosthesis,implant
‑
supported)两部分。它采用人工材料(如金属、陶瓷等)制成种植体(一般类似牙根形态),经手术方法植入组织内(通常是上下颌)并获得骨组织牢固的固位支持,通过特殊的装置和方式连接支持上部的牙修复体。种植牙螺钉并发症主要包括种植体及修复体相关的螺丝、基台、种植体折断、修复体损坏等。
88.图1是本实用新型智能螺钉结构示意图,螺钉包括钉头201以及螺杆202,螺杆202表面均匀分布有多个凹槽,凹槽中设置有光纤传感器100,光纤传感器由保护套包裹101,钉头201内部设置有集成模块、电源模块以及外接天线104,电源模块用于为集成模块提供电源。
89.具体的,钉头201内部开设有中空的腔体203,集成模块以及电源模块设置在腔体中。钉头内部设置有第一孔洞,第一孔洞与钉头水平面平行并且与腔体203连接,外接天线104设置在第一孔洞中。
90.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对螺钉的受力进行分析,判断出螺钉的状态,并根据螺钉状态进行相应预警提示。
91.螺钉受力后可能会发生弯曲或者断裂,根据光纤传感器的光信号数据判断螺钉弯曲的方法包括:智能终端实时监测各光纤传感器的光信号数据,若任一光纤传感器的光信号出现损耗,损耗值大于设定的第一阈值,则判定螺钉出现了弯曲。
92.当螺钉受力超过其本身阈值时,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了螺钉断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗
阈值。
93.螺钉植入体内后,在人体运动过程中,还会出现松动的情况,若某部分光纤传感器的光信号损耗数据出现持续减小的情况,则判定该部分出现了松动。若光纤传感器的光信号损耗减小到第一阈值,则表示出现了严重的松动,需要预警。
94.实施案例2:植入物为固定针,骨科固定针是骨科外支架上常用的医疗器件,属于内植物范畴,其作用是置入体内、锚定骨骼并将骨骼与外固定架的其他部分相连接。常用的骨科固定针有普通针、斯氏针、schants针、张力克氏针等。
95.固定针构示意图如图2、3所示,固定针300表面均匀分布有多个凹槽302,凹槽中设置有光纤传感器100,光纤传感器由保护套包裹,固定针两端设置有固定装置301,固定装置用于固定光纤传感器100,固定针一端的固定装置中设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
96.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对固定针的受力进行分析,判断出固定针的状态,并根据固定针状态进行相应预警提示。
97.固定针受力后可能会发生弯曲或者断裂,根据光纤传感器的光信号数据判断固定针弯曲的方法包括:智能终端实时监测各光纤传感器的光信号数据,若任一光纤传感器的光信号出现损耗,损耗值大于设定的第一阈值,则判定固定针出现了弯曲。
98.当固定针受力超过其本身阈值时,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了固定针断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗阈值。
99.固定针植入体内后,在人体运动过程中,还会出现松动的情况,若某部分光纤传感器的光信号损耗数据出现持续减小的情况,则判定该部分出现了松动。若光纤传感器的光信号损耗减小到第一阈值,则表示出现了严重的松动,需要预警。
100.实施案例3:植入物为髓内棒,图4是本实用新型髓内棒结构示意图,髓内棒400螺孔401两侧均匀分布有多个凹槽402,凹槽402中设置有光纤传感器,光纤传感器由保护套包裹,髓内棒螺孔两侧内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
101.具体的,髓内棒400螺孔401两侧内部设置有中空的腔体,集成模块以及电源模块设置在腔体中。髓内棒螺孔两侧内部设置外接天线的方式包括:髓内棒螺孔两侧内部设置有第一孔洞,第一孔洞与髓内棒轴线垂直并且与腔体连接,外接天线设置在第一孔洞中。
102.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对髓内棒的受力进行分析,判断出髓内棒的状态,并根据髓内棒状态进行相应预警提示。
103.实施案例4:植入物为髋关节假体,图6是本实用新型髋关节假体结构示意图,包括球头501、内衬502以及股柄503,球头501可在内衬502中自由转动,股柄503与球头连接。
104.股柄503表面均匀分布有多个凹槽,凹槽中设置有光纤传感器100,光纤传感器由保护套101包裹,球头501内部设置有集成模块、电源模块以及外接天线104,电源模块用于为集成模块提供电源。集成模块包括mems单元102,以及通信单元103,外接天线104与通信
单元103连接,光纤传感器与mems单元102连接。
105.具体的,球头501内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;球头内部设置第一孔洞,第一孔洞与股柄503轴线平行并且与腔体连接,外接天线104设置在第一孔洞中。
106.集成模块、外接天线以及电源模块还可以设置在股柄内部。
107.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对髋关节假体的受力进行分析,判断出髋关节假体的状态,并根据髋关节假体状态进行相应预警提示。
108.髋关节假体受力形变,可能会发生弯曲以及断裂等情况。
109.判断髋关节假体弯曲的方法包括:智能终端实时监测各光纤传感器的光信号数据,若任一光纤传感器的光信号出现损耗,损耗值大于设定的第一阈值,则判定髋关节假体出现了弯曲。
110.当髋关节假体受力超过其本身阈值时,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了髋关节假体断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗阈值。
111.例如,股柄表面的光纤传感器的光信号损耗值大于第一阈值,则表示股柄出现了弯曲,若光纤传感器上的光信号损耗值持续增大,超过了第二阈值,然后出现了股柄部位无法监测到信号的情况,表示股柄出现了断裂。
112.在人体运动过程中,髋关节假体还会出现松动、脱位等情况,若某部分光纤传感器的光信号损耗值出现持续减小的情况,则判定该部分出现了松动。
113.例如球头501和内衬502比较容易发生脱位,因此还可以在球头表面设置相应的感应装置,例如可以在球头表面设置凹槽,在凹槽中设置压力传感器或者其他能够感应光信号的传感器或装置,脱位后,球头可能无法收到内衬的压力,球头中感应装置的受力就会逐步减小,其应力就会减小,直到等于其初始应力值,则表示球头与内衬发生了脱位。
114.实施案例5:植入物为肩关节假体,图5是本实用新型肩关节假体结构示意图,包括球头501、内衬502以及股柄503,球头501可在内衬502中自由转动,股柄503与球头连接。
115.股柄503表面均匀分布有多个凹槽,凹槽中设置有光纤传感器100,光纤传感器由保护套101包裹,球头501内部设置有集成模块、电源模块以及外接天线104,电源模块用于为集成模块提供电源。集成模块包括mems单元102,以及通信单元103,外接天线104与通信单元103连接,光纤传感器与mems单元102连接。
116.具体的,球头501内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;球头内部设置第一孔洞,第一孔洞与股柄503轴线平行并且与腔体连接,外接天线104设置在第一孔洞中。
117.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对肩关节假体的受力进行分析,判断出肩关节假体的状态,并根据肩关节假体状态进行相应预警提示。
118.肩关节假体受力形变,可能会发生弯曲以及断裂等情况。
119.判断肩关节假体弯曲的方法包括:智能终端实时监测各光纤传感器的光信号数
据,若任一光纤传感器的光信号出现损耗,损耗值大于设定的第一阈值,则判定肩关节假体出现了弯曲。
120.当肩关节假体受力超过其本身阈值时,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了肩关节假体断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗阈值。
121.例如,股柄表面的光纤传感器的光信号损耗值大于第一阈值,则表示股柄出现了弯曲,若光纤传感器上的光信号损耗值持续增大,超过了第二阈值,然后出现了股柄部位无法监测到信号的情况,表示股柄出现了断裂。
122.在人体运动过程中,肩关节假体还会出现松动、脱位等情况,若某部分光纤传感器的光信号损耗值出现持续减小的情况,则判定该部分出现了松动。
123.例如球头501和内衬502比较容易发生脱位,因此还可以在球头表面设置相应的感应装置,例如可以在球头表面设置凹槽,在凹槽中设置压力传感器或者其他能够感应光信号的传感器或装置,脱位后,球头可能无法收到内衬的压力,球头中感应装置的受力就会逐步减小,其应力就会减小,直到等于其初始应力值,则表示球头与内衬发生了脱位。
124.实施案例6:植入物为腕关节假体,图7是本实用新型腕关节假体结构示意图,包括球头501、内衬502以及股柄503,球头501可在内衬502中自由转动,股柄503与球头连接。
125.股柄503表面均匀分布有多个凹槽,凹槽中设置有光纤传感器100,光纤传感器由保护套101包裹,球头501内部设置有集成模块、电源模块以及外接天线104,电源模块用于为集成模块提供电源。集成模块包括mems单元102,以及通信单元103,外接天线104与通信单元103连接,光纤传感器与mems单元102连接。
126.具体的,球头501内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;球头内部设置第一孔洞,第一孔洞与股柄503轴线平行并且与腔体连接,外接天线104设置在第一孔洞中。
127.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对腕关节假体的受力进行分析,判断出腕关节假体的状态,并根据腕关节假体状态进行相应预警提示。
128.腕关节假体受力形变,可能会发生弯曲以及断裂等情况。
129.判断腕关节假体弯曲的方法包括:智能终端实时监测各光纤传感器的光信号数据,若任一光纤传感器的光信号出现损耗,损耗值大于设定的第一阈值,则判定腕关节假体出现了弯曲。
130.当腕关节假体受力超过其本身阈值时,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了腕关节假体断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗阈值。
131.例如,股柄表面的光纤传感器的光信号损耗值大于第一阈值,则表示股柄出现了弯曲,若光纤传感器上的光信号损耗值持续增大,超过了第二阈值,然后出现了股柄部位无法监测到信号的情况,表示股柄出现了断裂。
132.在人体运动过程中,腕关节假体还会出现松动、脱位等情况,若某部分光纤传感器
的光信号损耗值出现持续减小的情况,则判定该部分出现了松动。
133.例如球头501和内衬502比较容易发生脱位,因此还可以在球头表面设置相应的感应装置,例如可以在球头表面设置凹槽,在凹槽中设置压力传感器或者其他能够感应光信号的传感器或装置,脱位后,球头可能无法收到内衬的压力,球头中感应装置的受力就会逐步减小,其应力就会减小,直到等于其初始应力值,则表示球头与内衬发生了脱位。
134.实施案例7:植入物为钉棒系统,钉棒系统最初是为治疗脊柱侧弯设计的,作为临时复位系统并辅助脊柱融合。上世纪60年代,harriton和luqne问世后,扩大到脊柱创伤治疗。上世纪70年代出现椎弓根,上世纪80年代,出现了c
‑
d钉棒结合装置系统。包括颈、枕、胸后路固定系统,腰椎后路钉棒系统,胸腰椎后路钉棒系统。
135.其主要功能为限制运动、脊柱复位、维持解剖维持复位的固定以及防止畸形发生促进骨性融合。适用于单纯性胸腰椎、腰椎骨折或骨折脱位、开放复位后或合并脊髓损伤的胸腰椎骨折或骨折脱位行开放复位和椎板减压术后,或某些胸腰段脊柱骨肿瘤切除术后同时应用,以增强脊柱的稳定性;或脊柱侧弯矫正以及脊柱融合。
136.图9是本实用新型钉棒系统结构示意图,包括弓根钉701以及棒702,弓根钉701植入脊椎关节中,每根棒702上设置有三个弓根钉,可调横联器连接两根棒702,所述棒702螺孔704两侧的表面以及弓根钉701螺杆表面均匀分布有多个凹槽703,凹槽703中设置有光纤传感器,光纤传感器由保护套包裹,棒的内部以及弓根钉螺杆内部设置有集成模块、电源模块以及外接天线。
137.具体的,棒702的内部以及弓根钉701螺杆内部设置有中空的腔体,集成模块以及电源模块设置在腔体中。棒的内部以及弓根钉螺杆内部设置有第一孔洞,第一孔洞与棒的轴线或弓根钉螺杆轴线平行,外接天线设置第一孔洞中。
138.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对钉棒系统的受力进行分析,判断出钉棒系统的状态,并根据钉棒系统状态进行相应预警提示。
139.钉棒系统受力形变,可能会发生弯曲以及断裂等情况。
140.判断钉棒系统弯曲的方法包括:智能终端实时监测各光纤传感器的光信号数据,若任一光纤传感器的光信号出现损耗,损耗值大于设定的第一阈值,则判定钉棒系统出现了弯曲。
141.当钉棒系统受力超过其本身阈值时,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了钉棒系统断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗阈值。
142.例如,当弓根钉受力时,可能会发生弯曲或者断裂等情况,若弓根钉螺杆表面的光纤传感器的光信号损耗值增大,大于第一阈值,表示弓根钉发生了弯曲,当持续增大到大于第二阈值后,就有极大可能发生断裂,断裂后智能终端将无法监测到光信号数据。
143.在人体运动过程中,钉棒系统还会出现松动的情况,若某部分光纤传感器的光信号损耗值出现持续减小的情况,则判定该部分出现了松动。
144.例如随着人体活动,弓根钉非常容易出现松动的情况,当弓根钉螺杆表面的光纤传感器光信号损耗值持续或者断续减小时,则表示弓根钉出现了松动,当弓根钉螺杆表面
的光纤传感器光信号损耗值减小到等于其初始损耗值时,表示出现了极大的松动,需要预警提示。
145.实施案例8:植入物为骨科固定支架,骨折复位后用骨科定支架借骨圆针等器材固定骨折两端,在体外维持复位牢固性的装置。
146.其作用分为单纯固定、加压固定、撑开固定、整复固定以及骨延长固定;其中单纯固定包括固定关节、固定骨折以及维持特殊固定;加压固定包括一次性加压(双边、多边)、调节性加压;撑开固定多见于用双边沟槽式外固定治疗胫骨平台塌陷、劈裂骨折和pilon骨折。
147.通常适用于伴有严重软组织伤和治疗较晚的开放性骨折、骨折伴有严重的烧伤、骨折并须作小腿交叉皮瓣、游离血管皮瓣或其他重建手术者、需要牵伸固定维持肢体长度的骨折、肢体延长、关节固定术、骨折感染或不愈合、部分骨盆骨折和脱位、开放性,感染性骨盆骨折不愈合、重建性的骨盆截骨术、肿瘤根治术后,作自体或异体置换术固定之用、儿童股骨截骨术、肢体再植、骨折伴有血管、n修复和重建者、多发闭合骨折的固定、补充不坚强的内固定、韧带整复术、有头部损伤病人的骨折固定以及必需搬动的病人的骨折临时固定。
148.根据形态结构分为:单边、双边、三边、四边、半环和全环;
149.根据固定针排列分为:平行、扇形、锥形、交叉(半环和全环);
150.根据固定节段分为:跨关节、不跨关节。
151.图8是本实用新型骨科固定支架结构示意图,包括固定钢针601以及固定连杆602,固定连杆602与固定钢针601通过固定器连接,固定钢针用于固定受损骨关节。固定钢针601以及固定连杆602表面均匀分布有多个凹槽603,凹槽603中设置有光纤传感器,光纤传感器由保护套包裹,固定钢针以及固定连杆内部设置有集成模块、电源模块以及外接天线。
152.具体的,固定钢针以及固定连杆内部设置有中空的腔体,集成模块以及电源模块设置在腔体中。固定钢针以及固定连杆内部还设置有第一孔洞,第一孔洞与固定钢针或固定连杆的轴线垂直并且与腔体连接,外接天线设置在腔体中。
153.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对骨科固定支架的受力进行分析,判断出骨科固定支架的状态,并根据骨科固定支架状态进行相应预警提示。
154.骨科固定支架受力形变,可能会发生弯曲以及断裂等情况。
155.判断骨科固定支架弯曲的方法包括:智能终端实时监测各光纤传感器的光信号数据,若任一光纤传感器的光信号出现损耗,损耗值大于设定的第一阈值,则判定骨科固定支架出现了弯曲。
156.当骨科固定支架受力超过其本身阈值时,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了骨科固定支架断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗阈值。
157.例如,当固定钢针受力时,可能会发生弯曲或者断裂等情况,若固定钢针表面的光纤传感器的光信号损耗值增大,大于第一阈值,表示固定钢针发生了弯曲,当持续增大到大于第二阈值后,就有极大可能发生断裂,断裂后智能终端将无法监测到光信号数据。
158.在人体运动过程中,钉棒系统还会出现松动的情况,若某部分光纤传感器的光信号损耗数据出现持续减小的情况,则判定该部分出现了松动。
159.例如随着人体活动,固定钢针非常容易出现松动的情况,当固定钢针表面的光纤传感器的光信号损耗值持续或者断续减小时,则表示固定钢针出现了松动,当固定钢针表面的光纤传感器光信号损耗值减小到等于其初始损耗值时,表示出现了极大的松动,需要预警提示。
160.实施案例9:植入物为接骨板,接骨板是带孔板状骨折内固定器件。临床上常与骨螺钉或接骨丝配合使用,分为普通接骨板和加压接骨板两类,根据不同用途可制成条形、y形、l形、t形等,用于保护、加压、支撑、张力带以及桥接。
161.适用于关节内骨折、简单的骨干骨折、多骨折块的骨骺部和骨干骨折、涉及到关节的干骺端多骨折块骨折、具有不同类型的多节段骨折、复杂的粉碎性骨折、假体周围骨折再修复以及老年骨质疏松患者。
162.常用的包括普通接骨板、管形钢板、重建钢板、预期塑形钢板(解剖钢板)、加压接骨板、lc
‑
dcp(有限接触性动力加压钢板)、梯形加压钢板以及锁定钢板。
163.普通接骨板的类型较多,多由钴铬合金制成,一般为直板,圆孔式,孔直径稍大于螺钉直径,固定后,钢板无话动余地,不利于骨折端靠拢,断面略呈弧形,加工简单,其中以sherman板常用。普通接骨板板仅其骨折端固定作用,不起加压作用,固定骨干骨折,长度要求最好大于所固定骨干直径的4~5倍。骨折线两端分别以2~4枚螺钉固定,且应离开粉碎的骨折线,螺钉必须恰好穿过两侧皮质。接骨板根据固定部位强度的需要,设计出厚薄及长度不同的式样,分为上肢接骨板和下肢接骨板。前者以3.5mm螺钉固定,后者以4.5mm螺钉固定。
164.管形钢板,有大号半管形钢板和小号1/3管形钢板两种,非常薄,可以用在只有很少的软组织覆盖的地方,如尺骨远端、鹰嘴、外踝,由于厚度有限使其不像其他钢板那样很好地抵抗弯曲力量,椭圆形的孔可以用于偏心螺钉的放置。
165.重建钢板,将钢板塑形成三维的形状比较困难,尤其要弯曲外侧时。重建钢板以孔间的切迹为特征,便于弯曲;特殊的弯曲器械可以完成钢板平面内的塑形;钢板上椭圆形的孔便于加压。重建钢板对于需要复杂三维成形解剖部位如髋臼骨折十分有用,推荐使用根据骨的形状直接成形的钢板,其变形抗力比较低。
166.预期塑形钢板(解剖钢板),多种预期塑形钢板可以适应特殊解剖部位的准确的形状,常被用于骨骺骨折和干骺端骨折。钢板的形状使螺钉可以从不同的平面插入干骺端。不同形状的钢板可用于同一个解剖部位,选择哪种钢板取决于骨折的类型、手术路径和医师的喜好。它很少完全适合特定的解剖部位,经常需要进一步塑形。
167.加压接骨板,最早称为自动加压型或自身加压型接骨板(selfcompressionboneplate),系利用钢板上的钉孔特殊结构进行加压。比如,动力加压接骨板(dynaminccompressionplate,dcp),在加压侧钻孔时,紧贴钉孔远心端,当旋紧螺钉时,借助螺钉帽之坡度在钉孔远心端斜坡上滑移,以推动该骨折段向中心滑动,达到轴向加压的目的。
168.它是较常用的一种类型。根据螺钉旋入孔的位置不同,加压接骨板可以起到中和、加压和支持接骨板的作用。
169.lc
‑
dcp(有限接触性动力加压钢板),加压钢板会对骨膜血供产生不利的影响,如可能会引起严重的井发症。为了尽量减小其不利影响。发明了lc
‑
dcp。这种钢板的下表面是特殊成形的,可以减少50%与骨的接触面积。其横断面使刚度更加平衡分布,并使螺钉孔不会因应力增加而引起置入失败。特殊的导钻可确保螺钉能够准确置入负荷位、中性位或支撑位。另外,通用导钻有助于个别螺钉的固定,因为通用调节导钻的外径与螺钉外径相等,螺钉孔内的螺纹楔子可受到保护。
170.梯形加压钢板,梯形加压钢板主要为股骨干骨折设计,也适用于肱骨干骨折的加压固定,为双钢板由两个或数个横梁将钢板连接在一起,以增加钢板的固定强度。钢板外观呈梯形(trapzoidplate)或梯子形(ladderplate),能行骨折端加压固定。其横梁呈半圆形,较薄且狭窄,便于术中依骨的粗细进行调整。每一横梁钢板的两端设计有爪形的加压孔。螺钉为锥形,随着锥形螺钉从爪子形的加压孔顶端旋入,即产生骨折纵向加压作用。然后,旋入其余螺钉。依骨折固定的需要,特别是粉碎骨折,还可以从横梁上的螺钉孔旋入螺钉。进行骨折块固定。
171.有两个横梁者。适用于股骨干横行骨折,或短斜行骨折,有多个横梁者适用于粉碎骨折,对于严重的粉碎骨折,可使粉碎的骨折块环抱于半笼状的钢板之中,保持复位和固定。对于骨折上、下段粉碎骨折,可根据骨折和局部解剖学情况,选择特制的与骨的形状较贴近的钢板。
172.梯形加压钢板的优点:可增加钢板的固定强度。减少固定后钢板断裂和便于拔钉,对于粉碎骨折,利用环抱结构有利于骨折块的复位,可避免肢体短缩和旋转畸形。
173.锁定钢板,锁定钢板结合了钢板固定技术和经皮桥接钢板技术,应用锁定螺钉形成一种成角固定装置。marti等研究表明,锁定钢板比普通钢板承受的负荷更大。微创稳定系统(liss)使用单皮质锁定螺钉固定比传统的钢板固定系统允许更多的弹性形变。锁定钢板有锁定和非锁定两种设计。根据gardner的理论,锁定钢板力学上近似于单纯的锁定结构。锁定钢板具有更好的抗拔出性能,特别适合于骨质疏松骨折的患者。锁定钢板提供足够的力学强度,不需要在股骨远端、胫骨近端和胫骨平台的内外侧联合放置钢板。gosling指出,胫骨近端单侧应用锁定钢板与同一类型骨折双侧应用钢板的力学强度无明显差异。
174.锁定接骨板的概念已经扩展到用于固定小片骨折和大管状骨的骨折上,这些接骨板统称为锁定加压接骨板,即lcp(lockedcompressionplate)。由于“结合孔”的设计,它可以当做锁定接骨板用,或将两种技术联合应用。随着lcp的不断改良,出现了用于不同解剖部位的接骨板,如用于肱骨近端的philos接骨板,用胫骨关节周围的接骨板,用于股骨远端的股骨髁接骨板,和专门用于上肢的接骨板等。
175.图10是本实用新型接骨板结构示意图,接骨板800螺孔801两侧均匀分布有多个凹槽,凹槽中设置有光纤传感器100,光纤传感器由保护套101包裹,接骨板螺孔两侧内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
176.具体的,可以在接骨板螺孔两侧内部设置有中空的腔体,集成模块以及电源模块设置在腔体中;还可以在接骨板螺孔两侧内部设置有第一孔洞,第一孔洞与腔体连接并且第一孔洞与接骨板轴线垂直并且与腔体连接,外接天线设置在第一孔洞中。
177.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对接骨板的受力进行分析,判断出接骨板的状态,并根据接骨板状态
进行相应预警提示。
178.接骨板受力后可能会发生弯曲或者断裂,根据光纤传感器的光信号数据判断接骨板弯曲的方法包括:智能终端实时监测各光纤传感器的光信号数据,若任一光纤传感器的光信号出现损耗,损耗值大于设定的第一阈值,则判定接骨板出现了弯曲。
179.当接骨板受力超过其本身阈值时,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了固定针断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗阈值。
180.在人体运动过程中,接骨板还会出现松动的情况,若某部分光纤传感器的光信号损耗数据出现持续减小的情况,则判定该部分出现了松动。若光纤传感器的光信号损耗减小到第一阈值,则表示接骨板出现了严重的松动,需要预警。
181.实施案例10:植入物为椎间盘假体,人工椎间盘假体旨在取代受损椎间盘的运动和缓冲功能。并具有中等程度的变异,主要是在可变轴承设计、材料、植入技术和关节类型方面。有三种不同类型的轴承设计:约束、半约束和无约束。
182.人工椎间盘假体主要包括三个组成部分的假体以及两个组成部分的假体。
183.其中一种有3个部件的椎间盘假体,包括一个可移动的双凸核(椎核),可通过2个球面轴承(球和窝形关节)连接。运动自由度是由轴承表面的关节性质决定的。一个有3个部件的假体可以有2个关节轴承。具有不可压缩核心的假体在矢状面和冠状面分别具有2个自由度。
184.另一种带有3个关节组件和2个轴承的假体的例子是mobi
‑
c颈人工椎间盘。具有双凸可移动核心的3个组件假体将允许3个独立的角度运动(屈伸、侧弯和轴向旋转)。连同2个独立的平移(沿前后和横向),共5自由度。唯一缺失的自由度是沿椎间盘上下轴压缩的能力。
185.secure
‑
c型椎间盘假体具有可移动的核心,在矢状面,假体允许2自由度的运动。在冠状面上,只允许在自由度=1的上球面关节处进行侧向弯曲的角运动。secure
‑
c假体允许3个独立的角运动(屈伸、侧弯和轴向旋转)和1个独立的前后方向平移,共产生4自由度。
186.两个组成部分的假体:一个假体有两个关节组件和一个球面轴承(球窝关节),因为它只能允许3个独立的角运动,所以具有3自由度。如果共形轴承表面在运动弧期间保持完全接触,这两个分量之间不可能有平移运动。
187.鞍形关节允许在正交平面内进行独立的角运动,例如屈伸和横向弯曲(2自由度)。
188.球
‑
槽关节允许3个独立的角运动和在矢状面独立的屈伸角运动的平移。因此,具有球
‑
槽关节的假体具有4自由度。
189.椎间盘假体的材料主要有三种:不锈钢、钴和钛。不锈钢很少使用,因为它限制了磁共振的使用。钴和钛是最常用的,因为它们在其他关节置换装置上的长期成功率很高。表面特征包括龙骨、尖刺、钢丝网、增加的孔隙率、螺钉固定以及等离子喷涂钛、氧化铝、羟基磷灰石和磷酸钙的特殊涂层,这些都是经常使用的策略。关节类型是根据当前旋转中心的数量来定义的。球窝关节允许围绕一个单独的点旋转,而鞍关节提供了多个旋转中心,可以发生运动。
190.人工椎间盘置换假体有许多不同的形状和大小,但目前的设计分为四种类型:复
合材料、液压、弹性和机械椎间盘。
191.(1)复合材料:复合人工椎间盘由几个部分组成,通常是两个金属终板,中间夹有一个聚乙烯(塑料)垫片。
192.(2)液压型
‑
液压人工椎间盘包含一个脱水的核心,在压缩状态下植入。液压人工椎间盘为椎体之间提供空间和灵活性。
193.(3)弹性型:弹性人工椎间盘,类似复合人工椎间盘,由两种材料制成;然而,弹性人工椎间盘的核心是在两个金属板之间的聚碳酸酯聚氨酯,而不是塑料核心。中心核心是“可变形的”,旨在模拟椎间盘的自然粘弹性特性。
194.(4)机械型:机械的人工圆盘通常由两个连接部件组成,所有这些部件都是相同的材料(如金属)或金属和陶瓷的复合材料。
195.图11是本实用新型椎间盘假体结构示意图,包括第一椎面901、第二椎面902以及椎核903,椎核903包括凸起可运动的非金属球面轴承904和基座905,椎核903通过球面轴承904和第一椎面901连接,通过基座905与第二椎面902连接。
196.第一椎面901以及第二椎面902表面均匀分布有多个凹槽,凹槽中设置有光纤传感器100,光纤传感器由保护套101包裹,第一椎面901以及第二椎面902内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
197.具体的,可以在第一椎面901以及第二椎面902内部设置中空的腔体,集成模块以及电源模块设置在腔体中,还可以在第一椎面以及第二椎面内部设置第一孔洞,第一孔洞与腔体连接并且第一孔洞与第一椎面或第二椎面轴线垂直,外接天线设置在第一孔洞中。
198.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对椎间盘假体的受力进行分析,判断出椎间盘假体的状态,并根据椎间盘假体状态进行相应预警提示。
199.实施案例11:植入物为膝关节假体。
200.膝关节假体按材料可以分为如下类型:
201.metalonplastic:最常见的一种植入物。其特点是金属股假体附着在与胫骨假体相连的聚乙烯塑料垫片上。常用的金属有钴、铬、钛、锆以及镍。金属对塑料是最便宜的一种植入物,在安全性和植入物寿命方面有着最长的记录。然而,塑料植入物可能会出现一个问题,那就是由衬垫磨损的微小颗粒引发的免疫反应。这会导致骨头破裂,导致种植体松动和失败。制造的进步大大降低了塑料的磨损率。
202.ceramiconplastic:这种类型使用陶瓷假体代替金属假体(或带陶瓷涂层的金属假体)。它还安装在一个塑料垫片上。对金属植入物中的镍敏感的人可能会选择陶瓷植入物。这种植入物的塑料颗粒也会导致免疫反应。
203.ceramiconceramic:股骨和胫骨假体都是陶瓷做的。陶瓷部件最不可能与身体发生反应。然而,陶瓷关节假体在走路时会发出吱吱声。在极少数情况下,它们会在重压下碎裂成碎片,必须通过手术移除。
204.metalonmetal:股骨和胫骨假体都是金属做的。近年来,金属对金属植入物的使用越来越少,因为人们担心微量金属会渗漏到血液中。金属来自于植入物的化学分解。所有的金属植入物最初都是为年轻人提供更持久的关节置换。但是微量的金属会引起炎症,疼痛,甚至器官损伤。育龄妇女不能接受这些植入物,因为对胎儿的影响尚不清楚。
205.图12是本实用新型膝关节假体结构示意图,包括股骨假体组件1001、人工半月板1002以及胫骨假体组件1003,人工半月板1002表面均匀分布有多个凹槽,凹槽中设置有光纤传感器100,光纤传感器由保护套101包裹,人工半月板内部设置有集成模块、电源模块以及外接天线,电源模块用于为集成模块提供电源。
206.具体的,可以在人工半月板内部设置中空的腔体,集成模块以及电源模块设置在腔体中,还可以在人工半月板内部设置第一孔洞,第一孔洞与腔体连接并且第一孔洞与人工半月板水平面平行,外接天线设置在第一孔洞中。
207.通信单元通过外接天线将光纤传感器的光信号数据发送至智能终端,智能终端根据接收的光信号数据对膝关节假体的受力进行分析,判断出膝关节假体的状态,并根据膝关节假体状态进行相应预警提示。
208.膝关节假体受力后可能会发生弯曲或者断裂,根据光纤传感器的光信号数据判断膝关节假体弯曲的方法包括:智能终端实时监测各光纤传感器的光信号数据,若任一光纤传感器的光信号出现损耗,损耗值大于设定的第一阈值,则判定膝关节假体出现了弯曲。
209.当膝关节假体受力超过其本身阈值时,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了膝关节假体断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗阈值。
210.例如人工半月板受力超过其本身阈值后,光纤传感器的光信号会出现损耗增加,当其损耗大于第二阈值应力,然后发生光信号归零的情况,此时发生了人工半月板断裂,此时将无法监测到的光纤传感器的光信号数据,第二阈值大于第一阈值,第一阈值为光纤传感器的正常损耗阈值。
211.在人体运动过程中,膝关节假体还会出现松动的情况,若某部分光纤传感器的光信号损耗数据出现持续减小的情况,则判定该部分出现了松动。若光纤传感器的光信号损耗减小到第一阈值,则表示膝关节假体出现了严重的松动,需要预警。
212.可以理解的是,本实用新型包括但不限于上述实施例,例如还可以在人工椎体以及钛网表面设置凹槽,将感应丝置于凹槽内等。
213.本实用新型采用在植入物表面设置光纤传感器,光纤传感器的光信号随着植入物形变而发生变化,通过对光纤传感器的光信号监测来表征植入物的形变,反应植入物的状态,因为光信号的原因,其灵敏度与准确度非常高;还可以在植入物表面设置其他能够感受光信号的装置,例如可以在植入物本体表面开设凹槽,凹槽中设置压力传感器或者其他能够感受光信号的传感器或装置。
214.上述软件方法可由本领域技术人员根据本实用新型结构推导而出,不属于本实用新型的保护范围。
215.本实用新型的有益效果是:
216.能实时的连续的对植入物进行监测,避免存在遗漏风险;
217.能对植入物失效进行预警和早期干预,在累积过程中,早期发现、早期预警,则可能避免植入物失效的严重和恶化,从而避免患者手术失败或二次手术;
218.能精准的对植入物失效状态进行判定,避免了通过物理体格检查、x光和ct检查对植入物状态进行判定的滞后行,对松动、变形、移位等失效的早期阶段误判率更高,也避免
了严重依赖于临床医生和放射科诊断医生的经验判断;
219.远程的实时监测避免了、x光和ct检查带来的辐射危害;
220.远程实时监测;避免了患者往返医院多次检查,减少了误工、交通、检查费等多种费用,降低了医疗负担。
221.综上所述,本发明实现了骨科植入物状态的精确判断,并进行相应预警提示,极大地提高了骨科植入物的使用安全性,并且通过应力分析还能判断骨头生长愈合情况,极大地扩展了骨科植入物的应用空间。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。