1.本实用新型属于航空器智能控制领域,尤其涉及一种新型航空器智能控制装置。
背景技术:
2.无人航空器在军事和平常生活中被应用的越来越广泛,大多数的无人航空器需要通过手柄遥控的方式运行。无人航空器在操作时,需要将检测的影像数据实时反馈给控制台,而无人航空器的操作需要专门一个人双手拿着手柄进行操作;导致需要多个操作人员分别进行操作控制,由于多人之间协调困难且同步性差,导致控制效果较差,且现有的控制台设备体积大,不易携带。为此,提出一种新型航空器智能控制装置。
技术实现要素:
3.本实用新型的目的在于:提供一种新型航空器智能控制装置。
4.本实用新型采用的技术方案如下:
5.一种新型航空器智能控制装置,手环包括安装壳和佩戴组件,佩戴组件包括弹性橡胶圈和包套,包套与弹性橡胶圈的宽度相匹配,包套套设在弹性橡胶圈与其粘接固定,包套上开设有安装孔,包套位于安装孔四周的部分与弹性橡胶圈分离,安装孔的孔径小于安装壳,安装壳位于安装孔内,安装壳底部与弹性橡胶圈相接触,包套的安装孔周围的部分压在安装壳上部。
6.进一步的技术方案在于,所述弹性橡胶圈开设有多个透气孔。
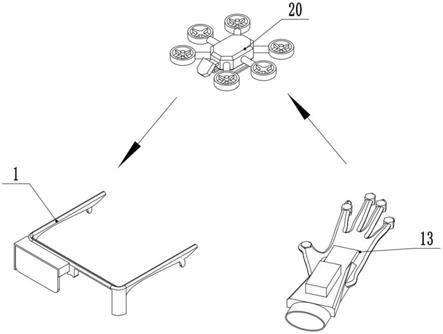
7.一种新型航空器智能控制装置,包括实时观察智能眼镜、智能控制手套和航空器;
8.所述实时观察智能眼镜上设在有显示器,显示器通过显示器架固定在实时观察智能眼镜的一侧,实时观察智能眼镜的镜框中设置有控制芯片、无线通讯模块、电池;控制芯片采用单片机芯片,控制芯片通过无线通讯模块与航空器连接,显示器设置在一个眼睛前方,显示器与摄像头数据连接,将摄像头摄像到的画面实时显示在显示器上;所述实时观察智能眼镜上设置有显示器架安装孔,显示器架一侧插入到显示器架安装孔内,显示器架安装孔内设有锁定机构;
9.所述锁定机构包括转轴、杠杆、锁块、锁扣按钮、弹簧、挤压板,杠杆为l形杆,且上端中部设有转轴并铰接,转轴两端固定在实时观察智能眼镜内,杠杆下端设置有锁块,杠杆的上端设置有锁扣按钮,锁扣按钮下方设置有弹簧,弹簧上端与杠杆固定,弹簧下端与挤压板一端固定,挤压板的另一端铰接在实时观察智能眼镜内,挤压板的连接弹簧的一端与显示器架接触,显示器架上设置有供锁块插入的凹槽;
10.所述智能控制手套上设置有控制器和无线通讯模块,智能控制手套的五个手指上分别设置有一号传感器、二号传感器、三号传感器、四号传感器、五号传感器,五个传感器与控制器连接;
11.所述航空器上设置有摄像头、转向螺旋桨、升降螺旋桨;转向螺旋桨安装在航空器四个角上,用于实现航空器的转向和翻转,航空器两侧各安装一个升降螺旋桨,升降螺旋桨
实现航空器的快速上升和下降,航空器内设置有无线通讯模块;
12.实时观察智能眼镜、智能控制手套、航空器通过无线通讯模块数据连接。
13.进一步的技术方案在于,所述实时观察智能眼镜两侧各设置有耳机。
14.进一步的技术方案在于,所述控制器安装在智能控制手套的手背出,控制器内设置还有单片机芯片、电池和无线通讯模块,一号传感器、二号传感器、三号传感器、四号传感器、五号传感器均为震动传感器,检测到手指震动后反馈给控制器,控制器根据震动的手指,将指令发送给航空器。
15.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
16.1.实时观察智能眼镜上设置有显示器,可以实时显示摄像头所拍摄到影像,操作人员一只眼睛可以观察摄像头所拍摄到影像,另一只眼睛可以观察航空器的飞行情况,起到同时兼顾的效果,使得可以更好的进行控制航空器拍摄。
17.2.智能控制手套的手指部分均设置震动传感器,通过移动相应的手指,对航空器的飞行轨迹进行控制,实现一个人一个手就可以控制航空器,避免多人之间协调困难且同步性差,导致控制效果较差。
18.3.航空器上设置有摄像头和螺旋桨,摄像头可以实时拍摄到影像,并传输给显示器,螺旋桨配合手指上的震动传感器,使航空器按轨迹飞行。
附图说明
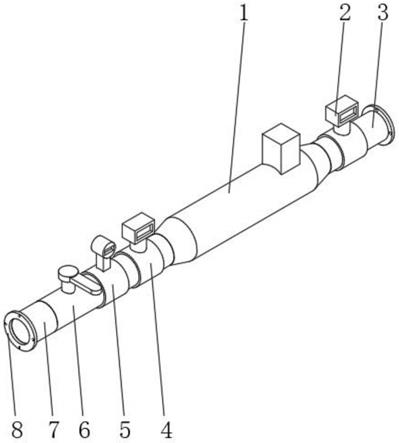
19.图1是本实用新型所述实时观察智能眼镜的前端结构示意图;
20.图2是本实用新型所述实时观察智能眼镜的后端结构示意图;
21.图3是本实用新型所述实时观察智能眼镜的前端卸掉显示器架时的结构示意图;
22.图4是本实用新型所述实时观察智能眼镜的俯视结构示意图;
23.图5是图4的a处放大剖视图;
24.图6是本实用新型所述智能控制手套的结构示意图;
25.图7是本实用新型所述航空器的结构示意图;
26.图8是本实用新型所述实时观察智能眼镜、智能控制手套、航空器的数据连接示意图。
27.图中:1、实时观察智能眼镜;2、显示器架;3、显示器;4、耳机;5、显示器架安装孔;6、显示器架固定器盖板;7、转轴;8、杠杆;9、锁块;10、锁扣按钮;11、弹簧;12、挤压板;13、智能控制手套;14、一号传感器;15、二号传感器;16、三号传感器;17、四号传感器;18、五号传感器;19、控制器;20、航空器;21、摄像头;22、转向螺旋桨;23、升降螺旋桨。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。
29.如图1
‑
图8所示。一种新型航空器智能控制装置,包括实时观察智能眼镜1、智能控制手套13和航空器20;实时观察智能眼镜1、智能控制手套13、航空器20通过无线通讯模块数据连接,无线通信模块可以采用现有的wifi模块、蓝牙模块等。实时观察智能眼镜1实时观察摄像头21摄像情况和航空器20飞行情况;智能控制手套13控制航空器20的飞行轨迹;
航空器20飞行到高处,进行高处摄像。实时观察智能眼镜1两侧各设置有耳机4。
30.实时观察智能眼镜1上设在有显示器3,显示器3采用led显示器,显示器3通过显示器架2固定在实时观察智能眼镜1的一侧,实时观察智能眼镜1的镜框中设置有控制芯片、无线通讯模块、电池;控制芯片采用单片机芯片,控制芯片通过无线通讯模块与航空器20连接,无线通讯模块通过无线网络传输数据,显示器3设置在一个眼睛前方,显示器3与摄像头21数据连接,将摄像头21摄像到的画面实时显示在显示器3上;实时观察智能眼镜1上设置有显示器架安装孔5,显示器架2一侧插入到显示器架安装孔5内,显示器架安装孔5内设有锁定机构;锁定机构包括转轴7、杠杆8、锁块9、锁扣按钮10、弹簧11、挤压板12,杠杆8为l形杆,且上端中部设有转轴7并铰接,转轴7两端固定在实时观察智能眼镜1内,杠杆8下端设置有锁块9,杠杆8的上端设置有锁扣按钮10,锁扣按钮10下方设置有弹簧11,弹簧11上端与杠杆8固定,弹簧11下端与挤压板12一端固定,挤压板12的另一端铰接在实时观察智能眼镜1内,挤压板12的连接弹簧11的一端与显示器架2接触,显示器架2上设置有供锁块9插入的凹槽;在安装显示器架2时,具体为:将显示器架2插入到显示器架安装孔5内,显示器架2一侧触碰到挤压板12,挤压板12一端向内被挤压,使得弹簧11被挤压后推动杠杆8的一端,杠杆8另一端设置的锁块9嵌入到显示器架2上设置的供锁块9插入的凹槽内,将显示器架2固定在显示器架安装孔5内,当需要解除锁定时,按下锁扣按钮10,克服弹簧11弹性力,使杠杆8一端向内摆动,使锁块9从凹槽内拔出,将显示器架2向外拉出。
31.智能控制手套13上设置有控制器19和无线通讯模块,智能控制手套13的五个手指上分别设置有一号传感器14、二号传感器15、三号传感器16、四号传感器17、五号传感器18,五个传感器与控制器19连接;控制器19安装在智能控制手套13的手背出,控制器19内设置还有单片机芯片、电池和无线通讯模块,一号传感器14、二号传感器15、四号传感器17、五号传感器18均为震动传感器,检测到手指震动后反馈给控制器19,控制器19根据震动的手指,将指令发送给航空器20。具体为:一号传感器14和五号传感器18控制摄像头21的角度,当转动或震动大拇指或小拇指时可以调整摄像头21的左和右摆动角度;二号传感器15和四号传感器17用于控制航空器20的转向螺旋桨22,控制航空器20向左和右转向,当摆动食指时航空器20向左或右转向,当摆动无名指时,航空器20向右转向;三号传感器16为磁致伸缩位移传感器,三号传感器16用于控制航空器20的升降,当中指向手掌内摆动时,控制航空器20的上升,摆动幅度越大,越快加速上升;中指向手掌外摆动时,航空器20下降,停止中指运动后,航空器20在原地飞行。一号传感器14、二号传感器15、三号传感器16、四号传感器17、五号传感器18的工作和使用方式均为现有技术。
32.航空器20上设置有摄像头21、转向螺旋桨22、升降螺旋桨23;转向螺旋桨22安装在航空器20四个角上,用于实现航空器20的转向和翻转,航空器20两侧各安装一个升降螺旋桨23,升降螺旋桨23实现航空器20的快速上升和下降,航空器20内设置有无线通讯模块。摄像头21、转向螺旋桨22、升降螺旋桨23均为现有技术中航空器上用的摄像头和螺旋桨。
33.以上仅为本实用新型的较佳实施例而已。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。