1.本实用新型涉及扫地机的技术领域,更确切地说涉及一种碰撞摇臂组件及扫地机。
背景技术:
2.随着扫地机的普及,越来越多的用户选用扫地机对室内进行清扫工作,以节省人力,而扫地机在实际工作过程中,常常会与家具、墙壁等发生碰撞。为了防止扫地机损坏,现有技术通常在扫地机的前部设置碰撞板和碰撞摇臂组件,碰撞摇臂组件包括设置在扫地机主机内的摇臂和槽型光耦,摇臂的一端从扫地机主机中伸出并与碰撞板相对,另一端设置有能与槽型光耦配合的斩光片,当扫地机发生碰撞时,碰撞板能起到缓冲的作用,避免扫地机主机损坏,同时碰撞板会推动摇臂的一端向扫地机主机的方向运动,使摇臂发生转动,则摇臂的另一端会划过槽型光耦,使槽型光耦产生信号,该信号能被扫地机主机接收并使扫地机主机停止前进或改变运动方向,当碰撞板不再受到碰撞后,碰撞板和摇臂均会复位。
3.由于摇臂的一端从扫地机主机中伸出,灰尘颗粒很容易从摇臂的伸出位置进入扫地机主机中并在扫地机主机内积聚,导致扫地机内部的元器件工作异常,比如污染或遮挡槽型光耦的光接收端,使槽型光耦失效。为了防止灰尘颗粒进入扫地机主机中,通常会在摇臂与扫地机主机之间设置挡尘密封片,挡尘密封片的外圈与扫地机主机密封连接,挡尘密封片的内圈与摇臂的外周壁密封连接,但是摇臂在来回转动的过程中,会带动挡尘密封片的内圈前后移动,从而使挡尘密封片很容易因为疲劳老化而破裂,导致无法阻挡灰尘颗粒。
技术实现要素:
4.本实用新型要解决的技术问题是,提供一种碰撞摇臂组件,挡尘密封片能适应摇臂的来回转动,不容易疲劳破裂,使用寿命长,阻挡灰尘颗粒的效果好。
5.本实用新型的技术解决方案是,提供一种碰撞摇臂组件,包括壳体、摇臂和运动检测传感器,摇臂可转动连接在壳体内,摇臂的一端伸出壳体外且用于与外部的运动部件接触,另一端位于运动检测传感器一侧且根据摇臂的一端的运动来触发所述的运动检测传感器发出信号,壳体外还设置有挡尘盖,挡尘盖上设置有连接孔,所述的连接孔用于与摇臂密封连接,挡尘盖上在连接孔的外侧设置有若干个同心的波纹环,挡尘盖还与壳体密封连接。
6.与现有技术相比,本实用新型的碰撞摇臂组件有以下优点:挡尘盖作为挡尘密封件,在摇臂在来回转动时,挡尘盖上所述的连接孔也随之前后移动,由于连接孔的外侧设置有若干个同心的波纹环,波纹环具有弹性,连接孔前后移动时,波纹环能够伸长或回缩,适应摇臂的运动且不容易疲劳,挡尘盖的使用寿命长,也不容易破裂,阻挡灰尘颗粒的效果较好。
7.优选的,所述的连接孔所在的最内层的波纹环凸出挡尘盖外。采用此结构,摇臂在来回转动时,可以减少对外层波纹环的影响。
8.优选的,壳体包括上下相对的上盖和下盖,上盖和下盖上下装配连接。采用此结
构,可以先把摇臂装配在上盖或下盖上,再将上盖和下盖上下装配好,方便把摇臂安装在壳体内。
9.优选的,挡尘盖与上盖和下盖的前端装配连接,该装配连接采用挡尘盖与上盖和下盖之间是前后方向的卡扣连接。采用此结构,既方便挡尘盖与壳体的装配,又使上盖和下盖连接稳固。
10.优选的,挡尘盖的内侧壁上设置有扣槽,上盖和下盖上均设置有可与扣槽相配合的卡头,卡头卡扣连接在扣槽内。采用此结构,结构简单,方便挡尘盖与上盖和下盖之间前后卡扣连接。
11.优选的,摇臂与壳体可转动连接,摇臂与壳体之间还设置有复位弹性件,摇臂上设置有前臂和后臂,前臂伸出壳体外并受外部的运动部件驱动而转动,后臂受前臂的带动而转动,后臂转动能触发所述的运动检测传感器发出信号,复位弹性件用于使摇臂复位。采用此结构,方便外部的运动部件驱动摇臂转动,在外部的运动部件不对摇臂施力时,复位弹性件能使摇臂复位。
12.优选的,所述的运动检测传感器是槽型光耦,后臂上设置有与槽型光耦配合的斩光片。采用此结构,摇臂转动时,斩光片能进入槽型光耦中,触发槽型光耦发出信号,结构简单,方便运动检测传感器对摇臂的转动进行检测。
13.优选的,前臂上设置有致动端,致动端与前臂之间设置有一个夹角,致动端用于与外部的运动部件相匹配。采用此结构,方便外部的运动部件与致动端接触并驱动摇臂转动。
14.优选的,壳体内设置有枢接杆,摇臂上设置有枢接孔,枢接杆插接在枢接孔内,摇臂能绕枢接杆转动。采用此结构,摇臂与壳体枢接,方便外部的运动部件驱动摇臂转动。
15.本实用新型要解决的另一个技术问题是,提供一种扫地机,扫地机中的碰撞摇臂组件使用的挡尘密封片能适应摇臂的来回转动,不容易疲劳破裂,使用寿命长,阻挡灰尘颗粒的效果好。
16.本实用新型的技术解决方案是,提供一种扫地机,包括主机,主机的前侧设置有碰撞板和至少一个碰撞摇臂组件,碰撞板与主机之间设置有弹性复位件,碰撞板可相对主机前后移动,碰撞摇臂组件位于主机和碰撞板之间,所述的碰撞摇臂组件是如上所述的碰撞摇臂组件,伸出壳体外的摇臂的端部位于碰撞板的后侧,当碰撞板朝向主机移动时,碰撞板能与伸出壳体外的摇臂接触并驱动摇臂转动。
17.与现有技术相比,本实用新型的扫地机有以下优点:当碰撞板驱动摇臂转动时,挡尘盖作为挡尘密封片,挡尘盖上所述的连接孔也随摇臂前后移动,由于连接孔的外侧设置有若干个同心的波纹环,波纹环具有弹性,连接孔前后移动时,波纹环能够伸长或回缩,适应摇臂的运动且不容易疲劳,挡尘盖的使用寿命长,也不容易破裂,阻挡灰尘颗粒的效果较好。
附图说明
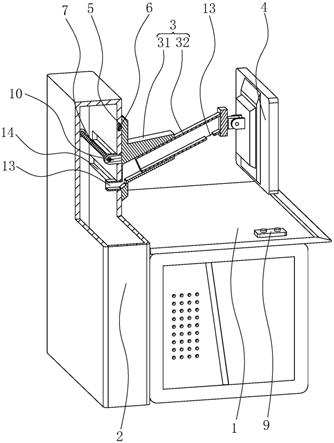
18.图1为本实用新型的扫地机的爆炸图。
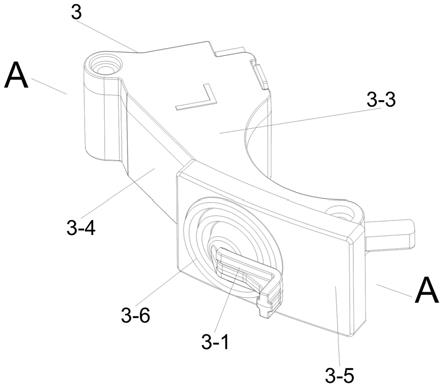
19.图2为本实用新型的碰撞摇臂组件的结构示意图。
20.图3为图2的a
‑
a剖视图。
21.图4为本实用新型的碰撞摇臂组件的爆炸图。
22.如图中所示:1、主机,2、碰撞板,3、碰撞摇臂组件,3
‑
1、摇臂,3
‑
11、前臂,3
‑
12、后臂,3
‑
13、斩光片,3
‑
14、枢接孔,3
‑
15、致动端,3
‑
2、槽型光耦,3
‑
3、上盖,3
‑
4、下盖,3
‑
41、卡头,3
‑
5、挡尘盖,3
‑
51、扣槽,3
‑
6、波纹环。
具体实施方式
23.为了更好得理解本技术,将参考附图对本技术的各个方面做出更详细的说明。应理解,这些详细说明只是对本技术的示例性实施方式的描述,而非以任何方式限制本技术的范围。在说明书全文中,相同的附图标号指代相同的元件。
24.在附图中,为了便于说明,已稍微夸大了物体的厚度、尺寸和形状。附图仅为示例而非严格按比例绘制。
25.还应理解的是,用语“包括”、“具有”、“包含”、“包含有”,当在本说明书中使用时表示存在所述的特征、整体、步骤、操作、元件和/或部件,但不排除存在或附加有一个或多个其他特征、整体、步骤、操作、元件、部件和/或它们的组合。此外,当诸如
“…
至少一个”的表述出现在所列特征的列表之后时,修饰整个所列特征,而不是修改列表中的单独元件。
26.实施例1:
27.如图2至图4中所示,本实用新型的碰撞摇臂组件3包括壳体,壳体包括挡尘盖3
‑
5以及上下相对的上盖3
‑
3和下盖3
‑
4,上盖3
‑
3和下盖3
‑
4上下装配连接,挡尘盖3
‑
5同时与上盖3
‑
3和下盖3
‑
4前后卡扣连接,挡尘盖3
‑
5的内侧壁上设置有扣槽3
‑
51,上盖3
‑
3和下盖3
‑
4上均设置有可与扣槽3
‑
51相配合的卡头3
‑
41,卡头3
‑
41卡扣连接在扣槽3
‑
51内,挡尘盖3
‑
5上设置有若干个同心的波纹环3
‑
6,最内层的波纹环凸出挡尘盖3
‑
5外且该环内设置有连接孔,挡尘盖3
‑
5采用橡胶等弹性材质。壳体内设置有摇臂3
‑
1和槽型光耦3
‑
2,下盖3
‑
4内设置有枢接杆,摇臂3
‑
1上设置有枢接孔3
‑
14,枢接杆插接在枢接孔3
‑
14内,摇臂3
‑
1能绕枢接杆转动,摇臂3
‑
1上位于枢接孔3
‑
14的两侧分别是前臂3
‑
11和后臂3
‑
12,前臂3
‑
11从挡尘盖3
‑
5最内层的波纹环的连接孔中伸出壳体外,连接孔与前臂3
‑
11密封连接,前臂3
‑
11的端部设置有致动端3
‑
15,致动端3
‑
15朝向挡尘盖3
‑
5的外部,致动端3
‑
15与前臂3
‑
11之间设置有一个夹角,本实施例中,该夹角是90度,后臂3
‑
12的端部设置有与槽型光耦3
‑
2配合的斩光片3
‑
13,下盖3
‑
4内部的前侧壁上还设置有复位弹性件,所述的复位弹性件与后臂3
‑
12相对,本实施例中,所述的复位弹性件是成型在下盖3
‑
4内的弹片。
28.当外部的运动部件推动致动端3
‑
15使摇臂3
‑
1绕枢接杆转动时,斩光片3
‑
13随后臂3
‑
12转动到槽型光耦3
‑
2的感应槽内,触发槽型光耦3
‑
2发出信号,该信号表示槽型光耦3
‑
2检测到摇臂3
‑
1的运动,此时后臂3
‑
12与所述的复位弹性件抵触,当外部的运动部件与致动端3
‑
15不再接触时,所述的复位弹性件推动后臂3
‑
12使摇臂3
‑
1复位。摇臂3
‑
1来回转动时,挡尘盖上所述的连接孔也随之前后移动,由于连接孔的外侧设置有若干个同心的波纹环,波纹环具有弹性,连接孔前后移动时,波纹环能够伸长或回缩,适应摇臂的运动且不容易疲劳,挡尘盖的使用寿命长,也不容易破裂,阻挡灰尘颗粒的效果较好。
29.实施例2:
30.将本实施例1的碰撞摇臂组件应用到扫地机中,如图1中所示,本实用新型的扫地机包括主机1,主机1的前侧设置有碰撞板2和两个如实施例1中所述的碰撞摇臂组件3,碰撞板2与主机1之间设置有弹性复位件,两个碰撞摇臂组件均位于主机1和碰撞板2之间,且2个
碰撞摇臂组件中的摇臂3
‑
1的致动端3
‑
15分别位于碰撞板2的左后侧和右后侧,碰撞板2可相对主机1前后移动。
31.当本实用新型的扫地机的前部即碰撞板2受到外部障碍物碰撞时,碰撞板2被迫朝向主机1移动,此过程中,碰撞板2会与至少一个碰撞摇臂组件的致动端3
‑
15接触并推动对应的摇臂3
‑
1转动,直至摇臂3
‑
1上的斩光片3
‑
13转动到槽型光耦3
‑
2的感应槽内触发槽型光耦3
‑
2发出信号,扫地机会接受这个信号并停止前进或改变运动方向,此时碰撞板2与所述的弹性复位件抵触,当碰撞板2不再与外部障碍物接触时,所述的弹性复位件抵触推动碰撞板2背向主机1移动直至复位。在扫地机工作过程中,挡尘盖上的波纹环能够伸长或回缩来适应摇臂3
‑
1的运动,不容易疲劳,使用寿命长,也不容易破裂,能很好地起到阻挡灰尘颗粒进入主机1内的作用。
32.以上仅为本实用新型的具体实施例,并非用来限定本实用新型的实施范围;如果不脱离本实用新型的精神和范围,对本实用新型进行修改或者等同替换,均应涵盖在本实用新型权利要求的保护范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。