1.本实用新型涉及机器人的技术领域,尤其是指一种基于激光雷达定位的智能采摘机器人。
背景技术:
2.在林业生产中,林木球果的采集一直是个难题,国内外虽已研制出了多种球果采集机,如升降机、树干振动机等,但由于这些机械本身都存在着这样或那样的缺点,所以没有被广泛使用。目前在林区仍主要采用人工上树手持专用工具来采摘林木球果,这样工人劳动强度大,作业安全性差,生产率低,尤其是榴莲采摘,必须有人在下面接着果子,十分容易砸伤人。
技术实现要素:
3.本实用新型的目的是提供一种基于激光雷达定位的智能采摘机器人,其具有自动采摘高树上的水果的效果。
4.本实用新型的上述实用新型目的是通过以下技术方案得以实现的:
5.一种基于激光雷达定位的智能采摘机器人,包括支撑架和承接框篮,所述承接框篮和支撑架顶端侧壁连接,所述支撑架底端设置有底座,所述底座两侧设置有履带机构,所述支撑架分为上部和下部,所述承接框篮和上部侧壁连接,所述上部和下部之间采用电缸和伸缩杆连接,所述上部内设置有激光刀,所述承接框篮设置有挡板,所述支撑杆顶端设置有视觉识别机构和测距机构,所述视觉识别机构连接有控制器,所述控制器连接测距机构和激光刀,所述测距机构采用激光雷达系统。
6.优选的,所述履带机构表面设置有齿条。
7.优选的,所述承接框篮包括外壳和内衬,所述内衬包括固定于外壳槽口的圆环和固定于圆环上的网袋。
8.优选的,所述视觉识别机构采用ccd相机。
9.优选的,所述承接框篮和上部采伺服电机转动连接。
10.综上所述,本实用新型的有益效果:
11.首先视觉识别机构将榴莲识别出来,然后测距机构进行测距,然后控制器控制履带机构将整个采摘机器人移动到榴莲的正下方,驱动电缸上升支撑架上方,从而将榴莲怼进承接框篮内部,然后控制器控制激光刀启动,将榴莲断茎,然后将下降支撑架,从而完成榴莲等高树果物的采摘。
附图说明
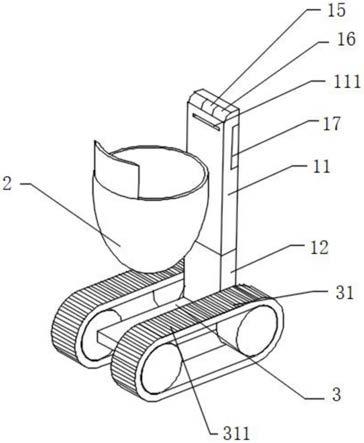
12.图1为本实用新型的整体结构示意图;
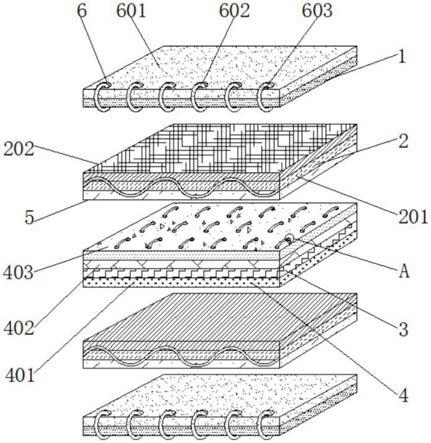
13.图2是图1中剖面示意图。
14.图中标识分别为,1、支撑架;11、上部;111、激光刀;12、下部;13、电缸;14、伸缩杆;
15、视觉识别机构;16、测距机构;17、控制器;2、承接框篮;21、外壳;22、内衬;221、圆环;222、网袋;23、伺服电机;3、底座;31、履带机构;311、齿条。
具体实施方式
15.为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。以下结合附图对本实用新型进行详细的描述。
16.以下结合附图对本实用新型作进一步详细说明。
17.参见图1到图2,一种基于激光雷达定位的智能采摘机器人,包括支撑架1和承接框篮2,所述承接框篮2和支撑架1顶端侧壁连接,所述支撑架1底端设置有底座3,所述底座3两侧设置有履带机构31,所述支撑架1分为上部11和下部12,所述承接框篮2和上部11侧壁连接,所述上部11和下部12之间采用电缸13和伸缩杆14连接,所述上部11内设置有激光刀111,所述承接框篮2设置有挡板,所述支撑杆顶端设置有视觉识别机构15和测距机构16,所述视觉识别机构15连接有控制器17,所述控制器17连接测距机构16和激光刀111,所述测距机构16采用激光雷达系统。
18.工作原理:首先视觉识别机构15将榴莲识别出来,然后测距机构16进行测距,然后控制器17控制履带机构31将整个采摘机器人移动到榴莲的正下方,驱动电缸13上升支撑架1上方,从而将榴莲怼进承接框篮2内部,然后控制器17控制激光刀111启动,将榴莲断茎,然后将下降支撑架1,从而完成榴莲等高树果物的采摘。
19.所述履带机构31表面设置有齿条311,采用这样的结构能够让履带机构31更加适合坡面上爬行。
20.所述承接框篮2包括外壳21和内衬22,所述内衬22包括固定于外壳21槽口的圆环221和固定于圆环221上的网袋222,采用这样的结构能够使得重型水果,比如榴莲也难以砸坏外壳21。
21.所述视觉识别机构15采用ccd相机。
22.所述承接框篮2和上部11采伺服电机23转动连接,采用这样的结构能够使得自动将榴莲等说过放置于地面上继续工作。
23.以上所述,仅是本实用新型较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型以较佳实施例公开如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当利用上述揭示的技术内容作出些许变更或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型技术是指对以上实施例所作的任何简单修改、等同变化与修饰,均属于本实用新型技术方案的范围内。
技术特征:
1.一种基于激光雷达定位的智能采摘机器人,其特征在于:包括支撑架(1)和承接框篮(2),所述承接框篮(2)和支撑架(1)顶端侧壁连接,所述支撑架(1)底端设置有底座(3),所述底座(3)两侧设置有履带机构(31),所述支撑架(1)分为上部(11)和下部(12),所述承接框篮(2)和上部(11)侧壁连接,所述上部(11)和下部(12)之间采用电缸(13)和伸缩杆(14)连接,所述上部(11)内设置有激光刀(111),所述承接框篮(2)设置有挡板,所述支撑架(1)顶端设置有视觉识别机构(15)和测距机构(16),所述视觉识别机构(15)连接有控制器(17),所述控制器(17)连接测距机构(16)和激光刀(111),所述测距机构(16)采用激光雷达系统。2.根据权利要求1所述一种基于激光雷达定位的智能采摘机器人,其特征在于:所述履带机构(31)表面设置有齿条(311)。3.根据权利要求2所述一种基于激光雷达定位的智能采摘机器人,其特征在于:所述承接框篮(2)包括外壳(21)和内衬(22),所述内衬(22)包括固定于外壳(21)槽口的圆环(221)和固定于圆环(221)上的网袋(222)。4.根据权利要求3所述一种基于激光雷达定位的智能采摘机器人,其特征在于:所述视觉识别机构(15)采用ccd相机。5.根据权利要求4所述一种基于激光雷达定位的智能采摘机器人,其特征在于:所述承接框篮(2)和上部(11)采用伺服电机(23)转动连接。
技术总结
本实用新型涉及一种基于激光雷达定位的智能采摘机器人,特别涉及机器人的技术领域,包括支撑架和承接框篮,所述承接框篮和支撑架顶端侧壁连接,所述支撑架底端设置有底座,所述底座两侧设置有履带机构,所述支撑架分为上部和下部,所述承接框篮和上部侧壁连接,所述上部和下部之间采用电缸和伸缩杆连接,所述缝隙内设置有激光刀,所述承接框篮设置有挡板,所述支撑杆顶端设置有视觉识别机构和测距机构,所述视觉识别机构连接有控制器,所述控制器连接测距机构和激光刀,所述测距机构采用激光雷达系统,本实用新型具有自动采摘高树上的水果的技术效果。水果的技术效果。水果的技术效果。
技术研发人员:孙礼朋
受保护的技术使用者:和光精电(重庆)科技有限公司
技术研发日:2021.05.11
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。