1.本实用新型涉及医疗设备技术领域,更具体地说,涉及一种末端器械装置。此外,本实用新型还涉及一种包括上述器械装置的手术机器人。
背景技术:
2.微创医疗技术旨在减少诊断或手术期间被损伤的组织量,进而缩短患者的恢复时间、不适及有害副作用,尽可能减少患者的病痛。
3.作为微创手术机器人的器械及未端工具,在手术过程中,需要与医生助手及患者直接接触,临床医生会根据手术需要将不同的器械延伸工具通过切口通道送达手术位置。在送达过程中,可以通过人工送达,也可以使用机械通过导航辅助系统送达,因此,器械及未端工具在手术准备时必须是无菌状态。
4.现有的器械及未端工具在使用的过程中器械座用于安装器械,由于器械座为有菌区域,并且需要器械座为器械提供运功的动力,器械部分在安装的过程中极容易接触到器械座,造成感染。
5.综上所述,如何避免末端器械装置中有菌区域与无菌区域的交叉感染,是目前本领域技术人员亟待解决的问题。
技术实现要素:
6.有鉴于此,本实用新型的目的是提供一种末端器械装置,通过在无菌分隔座设置铺单薄膜用于隔离器械与器械座,避免器械座的有菌区域对器械造成感染,可以有效保证器械处于无菌状态。
7.本实用新型的另一目的是提供一种包括上述末端器械装置的手术机器人。
8.为了实现上述目的,本实用新型提供如下技术方案:
9.一种末端器械装置,包括:依次安装的器械座、无菌分隔座以及器械,所述无菌分隔座设置有用于隔离所述器械座与所述器械的铺单薄膜。
10.优选的,所述铺单薄膜向所述无菌分隔座的投影完全覆盖所述无菌分隔座。
11.优选的,所述无菌分隔座包括朝向所述器械座设置的分隔座底板和朝向所述器械设置的分隔座盖板;
12.所述铺单薄膜设置于所述分隔座底板与所述分隔座盖板之间,或所述铺单铺单薄膜设置于所述分隔座盖板的上表面。
13.优选的,所述分隔座盖板为l形结构,且所述l形结构的折弯部分朝向所述器械设置,所述铺单薄膜避开所述折弯部分朝向所述器械的一侧设置。
14.优选的,所述铺单薄膜将所述器械座的外周侧面完全覆盖。
15.优选的,所述铺单薄膜为弹性薄膜。
16.优选的,所述无菌分隔座和所述器械座中的一者设置有第一卡扣组件,所述无菌分隔座和所述器械座中的另一者设置有用于与所述第一卡扣组件配合卡接或解除的第一
卡钩。
17.优选的,所述器械和所述无菌分隔座中的一者设置有第二卡扣组件,所述器械和所述无菌分隔座中的另一者设置有用于与所述第二卡扣组件配合卡接或解除的第二卡钩。
18.优选的,所述第一卡扣组件和所述第二卡扣组件均包括导向座、按钮以及弹性部件,所述按钮设置有用于与所述第一卡钩或所述第二卡扣卡接的卡接部,且所述按钮相对于所述导向座可滑动设置;
19.所述弹性部件设置于所述导向座与所述按钮之间,在初始状态下,所述弹性部件处于压缩状态。
20.优选的,所述导向座设置有用于限制所述按钮滑动距离的腰型孔,还包括可滑动的设置于所述腰型孔的圆柱销,所述圆柱销穿过所述腰型孔且与所述按钮固定连接。
21.一种手术机器人,包括上述任一项所述的末端器械装置。
22.在使用本实用新型提供的末端器械装置时,在安装过程中,首先需要将铺单薄膜安装于无菌分隔座,然后再依次安装器械座、无菌分隔座以及器械。
23.由于无菌分隔座设置有铺单薄膜,安装之后,铺单薄膜的设置可以将器械座与器械有效分离,避免器械座中的有菌区域对器械造成感染,可以保证器械的无菌状态,提高手术的安全性。
24.此外,本实用新型还提供了一种包括上述末端器械装置的手术机器人。
附图说明
25.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
26.图1为本实用新型所提供的末端器械装置的具体实施例的爆炸示意图;
27.图2为图1中末端器械装置的器械部分的结构示意图;
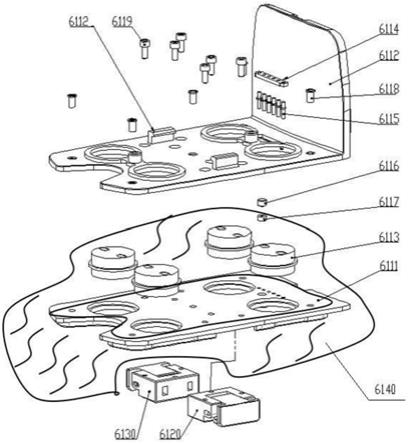
28.图3为铺单薄膜设置于分隔座底板与分隔座盖板之间时的爆炸示意图;
29.图4为设置有铺单薄膜的末端器械装置的前示图;
30.图5为卡扣组件的爆炸示意图;
31.图6为无菌分隔座与器械座之间的安装关系示意图;
32.图7为图6中无菌分隔座的俯视图;
33.图8为图7中b
‑
b方向的部分剖面示意图;
34.图9为图8中a部分的局部放大图;
35.图10为器械座与无菌分隔座的爆炸示意图;
36.图11为本实用新型所提供的末端器械装置的部分剖面示意图;
37.图12为图11中f部分的局部放大图;
38.图13为本实用新型所提供的末端器械装置在另一位置的部分剖面示意图;
39.图14为图13中d部分的局部放大图;
40.图15为本实用新型所提供的末端器械装置的后视图;
41.图16为图15中g
‑
g方向的剖面示意图;
42.图17为图16中c部分的局部放大图。
43.图1
‑
17中:
44.1900为器械座、1910为器械座盒组件、1911为器械盒安装座、1913为输出法兰、1920为pcb电路板组件、1921为pcb电路板、1922为霍尔传感器、1923为安装螺钉、1941为计数基板、1942为第一弹性触针、6100为无菌分隔座、6111为分隔座底板、6112为分隔座盖板、6113为转接法兰、6114为绝缘盖、6115为导通铜针、6116为垫块、6117为磁铁、6118为铆钉、6119为螺钉、6120为无菌座按钮左组件、6130为无菌座按钮右组件、6121为导向座、6131为按钮、6140为铺单薄膜、5100为器械、5111为器械盒底座、5112为法兰轴,5114为下槽轮、5116为上槽轮、5117为弹簧卡扣、5118为轴承、5121为承架,5115为转轴法兰、5124为计数板、5125为第二弹性触针、5126为器械导针、5150为末端工具、5141为长杆、5170为器械按钮左组件、5173为圆柱销、5174为弹簧、5190为器械按钮右组件。
具体实施方式
45.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
46.本实用新型的核心是提供一种末端器械装置,通过在无菌分隔座设置铺单薄膜,将器械座与器械分离,避免器械被器械座中的有菌区域感染,保持器械的无菌装填。本实用新型的另一核心是提供一种包括上述末端器械装置的手术机器人。
47.请参考图1
‑
17。
48.如图1所示,器械盒安装座1911朝向无菌分隔座6100设置,器械5100的长杆5141穿过无菌分隔座6100和器械座1900设置,器械5100中的器械盒底座5111安装于器械盒安装座1911,长杆5141的末端设置有末端工具5150,如图2所示,器械5100设置有转轴法兰5115,用于与器械座1900的输出法兰1913连接。
49.本具体实施例公开了一种末端器械装置,包括:依次安装的器械座1900、无菌分隔座6100以及器械5100,无菌分隔座6100设置有用于隔离器械座1900与器械5100的铺单薄膜6140。
50.需要进行说明的是,在使用末端器械装置的过程中,器械座1900处于有菌区域,无菌分隔座6100和器械5100需要保持无菌状态,单纯通过无菌分隔座6100将器械座1900和器械5100进行分割,并不能够避免器械5100接触有菌环境,因此在无菌分隔座6100设置铺单薄膜6140,使铺单薄膜6140对器械座1900和器械5100进行分离,有利于保持器械5100的无菌状态。
51.优选的,铺单薄膜6140为弹性薄膜,在使用的过程中,可以避免铺单薄膜6140被扯断或破坏。
52.为了使铺单薄膜6140能够将器械座1900与器械5100完全分离,在使用的过程中,可以使铺单薄膜6140向无菌分隔座6100的投影完全覆盖无菌分隔座6100,即铺单薄膜6140完全将无菌分隔座6100遮住,避免器械5100接触有菌区域。
53.优选的,可以使铺单薄膜6140将所述器械座1900的外周侧面完全覆盖,即铺单薄
膜6140的边缘部分延伸至完全将器械座1900包裹。
54.在使用本具体实施例提供的末端器械装置时,在安装过程中,首先需要将铺单薄膜6140安装于无菌分隔座6100,然后在依次安装器械座1900、无菌分隔座6100以及器械5100。
55.由于无菌分隔座6100设置有铺单薄膜6140,安装之后,铺单薄膜6140的设置可以将器械座1900与器械5100有效分离,避免器械座1900中的有菌区域对器械5100造成感染,可以保证器械5100的无菌状态,提高手术的安全性。
56.无菌分隔座6100包括朝向器械座1900设置的分隔座底板6111和朝向器械5100设置的分隔座盖板6112;铺单薄膜6140设置于分隔座底板6111与分隔座盖板6112之间,或铺单铺单薄膜6140设置于分隔座盖板6112的上表面。
57.当铺单薄膜6140设置于分隔座底板6111和分隔座盖板6112之间时,将分隔座底板6111和分隔座盖板6112扣合的过程中,便可以将铺单薄膜6140固定,并且在铺单薄膜6140具有一定弹性的情况下,在铺单薄膜6140被分隔座底板6111和分隔座盖板6112挤压的过程中,也不会被破坏,可以有效提高隔离效果。
58.当铺单薄膜6140设置于无菌分隔座6100与器械5100之间时,铺单薄膜6140设置于分隔座盖板6112的上表面,在使用的过程中,安装器械5100至无菌分隔座6100的过程中便可以将铺单薄膜6140固定。
59.可以将分隔座盖板6112为l形结构,且l形结构的折弯部分朝向器械5100设置,铺单薄膜6140避开折弯部分朝向器械5100的一侧设置;即在设置铺单薄膜6140的过程中,铺单薄膜6140不与l形结构的折弯部分的内表面接触。
60.如图3所示,器械通过铆钉6118固定于l形结构的折弯部分,l形结构的折弯部分设置有绝缘盖6114,在安装器械5100的时,需要通过螺钉6119将其固定。
61.在安装器械5100的过程中,l形结构的折弯部分具有一定的导向作用,可以方便器械5100的安装,另外,将分隔座盖板6112设置为l形结构,可以有效避免铺单薄膜6140被卷入器械5100与无菌分隔座6100之间。
62.优选的,铺单薄膜6140为透明薄膜。
63.在上述实施例的基础上,可以在无菌分隔座6100和器械座1900中的一者设置第一卡扣组件,无菌分隔座6100和器械座1900中的另一者设置有用于与第一卡扣组件配合卡接或解除的第一卡钩。
64.在安装的过程中,如图13
‑
14所示,无菌分隔座6100设置有两个相对设置的第一卡扣组件,包括无菌座按钮左组件6120和无菌座按钮右组件6130,器械座1900设置有第一卡钩,在使用的过程中,当需要对无菌分隔座6100进行安装时,只需要向下按压无菌分隔座6100,卡扣组件的下部具有折弯的卡扣便会与器械座1900中的第一卡钩接触,卡扣克服两者之间的摩擦力移动至卡接位置,器械座1900与无菌分隔组件实现卡接;当需要将无菌分隔座6100与器械座1900分离时,只需按压无菌座按钮左组件6120和无菌座按钮右组件6130,便可以使卡扣与卡第一卡钩解除卡接配合,向上抬起无菌分隔座6100,便可以将两者分离。
65.还可以在器械5100设置两个第二卡扣组件,包括器械按钮左组件5170和器械按钮右组件5190,在使用的过程中,当需要对器械5100进行安装时,只需要向下按压器械5100,
按钮6131左组件和器械按钮右组件5190的下部具有折弯的卡扣便会与无菌分隔座6100中的第二卡钩接触,卡扣克服两者之间的摩擦力移动至卡接位置,器械5100与无菌分隔组件实现卡接;当需要将无菌分隔座6100与器械5100分离时,只需按压第二卡扣组件的按钮6131部分,便可以使卡扣与第二卡钩解除卡接配合,向上抬起器械5100,便可以将两者分离。
66.第一卡扣组件和第二卡扣组件均包括导向座6121、按钮6131以及弹性部件,按钮6131设置有用于与第一卡钩或第二卡扣卡接的卡接部,且按钮6131相对于导向座6121可滑动设置;弹性部件设置于导向座6121与按钮6131之间,在初始状态下,弹性部件处于压缩状态。
67.导向座6121设置有用于限制按钮6131滑动距离的腰型孔,还包括可滑动的设置于腰型孔的圆柱销5173,圆柱销5173穿过腰型孔且与按钮6131固定连接。
68.在使用的过程中,向里按压按钮6131,按钮6131相对于导向座6121沿滑槽滑动,滑动的距离仅限于腰型孔的长度范围。
69.可以在按钮6131设置用于使圆柱销5173穿过的通孔,装配的过程中使圆柱销5173依次穿过腰型孔、通孔、腰型孔,并且使圆柱销5173与通孔过盈配合,以限制按钮6131相对于导向座6121的滑动距离。
70.如图5所示,可以将卡扣设置为l形结构,且卡扣的端部的下表面设置有方便待连接部件滑入的第一斜面。
71.需要进行说明的是第一斜面的设置,在安装的过程中可以起到导向的作用,方便第一卡钩或第二卡钩沿第一斜面滑入卡接位,实现卡接。
72.可以在卡扣的端部的上表面设置用于与第一卡钩或第二卡钩配合的第一定位面。
73.第一定位面可以是平面也可以是斜面,具体根据实际情况确定,在此不做赘述。
74.考虑到实际安装过程中原材料的获取难度,可以将弹性部件设置为弹簧5174,导向座6121为u形结构,弹簧5174设置于u形结构的凹槽内。
75.优选的,可以在u形结构的导向座6121的凹槽底部设置用于固定弹簧5174的凹陷部,在按钮6131设置于凹陷部配合的固定部,以避免弹簧5174在使用的过程中发生位移。
76.如图6
‑
10所示,还包括用于检测无菌分隔座6100是否安装到位的霍尔传感器1922和磁铁6117,其中磁铁6117设置于分隔座底板6111的安装孔,并通过垫块6116进行固定定位,霍尔传感器1922设置于器械座1900,并且霍尔传感器1922与pcb电路板1921连接,并通过安装螺钉1923将pcb电路板1921固定。
77.在安装无菌分隔座6100的过程中,霍尔传感器1922会逐渐靠近磁铁6117,当靠近至一定距离之内时,霍尔传感器1922会检测到磁铁6117产生的磁场,霍尔传感器1922导通,输出高电平和低电平中的一者;当霍尔传感器1922没有检测到磁铁6117产生的磁场时,霍尔传感器1922未导通,输出所述高电平和所述低电平中的另一者,控制器可以根据霍尔传感器1922输出电平的状态判断无菌分隔座6100是否安装到位。
78.如图11
‑
12所示,在无菌分隔座6100中设有四组浮动的转接法兰6113,下端与器械座1900上的四组输出法兰1913配合,上端分别与器械5100的大法兰轴5112和小法兰轴5112配合。输出法兰1913、转接法兰6113以及法兰轴5112上都设有锥形凹凸槽,通过锥形凹凸槽配合以传递电机的转矩;图中设置有弹簧卡扣5117、轴承5118以及承架5121,图11中设置有
器械座盒组件1910和pcb电路板组件1920。
79.大小法兰轴5112上各布置有一组槽轮,下槽轮5114通过键槽与法兰轴5112配合,上槽轮5116与下槽轮5114通过端面齿配合,达到一起同步旋转的效果,同时带动牵引体运动。此设备共有四组类似的传动机构,通过控制这四组机构的不同运动,来完成器械5100未端工具的要求动作,以辅助临床医生进行各种手术。
80.如图15
‑
17所示,器械座1900设置有计数基板1941以及安装于计数基板1941的第一弹性触针1942,器械5100设置有计数板5124以及安装于计数板5124的器械导针5126,无菌分隔座6100浮动设置有导通铜针6115,且导通铜针6115的一端与第一弹性触针1942接触,另一端与器械导针5126接触;以使导通铜针6115接触导通,用以传递器械5100的工作状态信号及使用次数信息。
81.需要进行说明的是,第二弹性触针5125的一端与计数板5124连接,另一端与器械导针5126连接,因此导通铜针6115与器械导针5126接触之后,便相当于与计数板5124连通。
82.除了上述末端器械装置,本实用新型还提供一种包括上述实施例公开的末端器械装置的手术机器人,该手术机器人的其他各部分的结构请参考现有技术,本文不再赘述。
83.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。本实用新型所提供的所有实施例的任意组合方式均在此实用新型的保护范围内,在此不做赘述。
84.以上对本实用新型所提供的手术机器人及其末端器械装置进行了详细介绍。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。