技术特征:
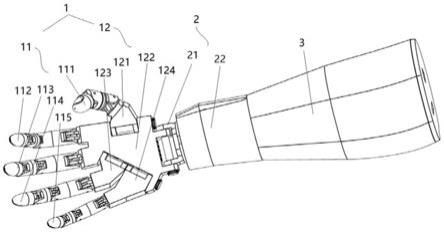
1.一种基于脑电波控制的仿生3d打印机械手,其特征在于,包括转动连接的手部(1)和手腕部(2)、与手腕部(2)固定连接的手臂部(3),以及设置于机械手内部的舵机组;所述的手部(1)包括手掌件(12)以及铰接于手掌件(12)上的若干个手指件(11),每个手指件(11)设有若干个指节,相邻指节铰接;所述的舵机组通过连接绳(6)控制单个指节、手指件(11)或手掌件(12)的独立转动;连接绳(6)由舵机组引出,在分别绕过指节、手掌件(12)或手腕部(2)后,返回舵机组。2.根据权利要求1所述的一种基于脑电波控制的仿生3d打印机械手,其特征在于,所述的手指件(11)设有5个,包括依次设置的大拇指件(111)、食指件(112)、中指件(113)、无名指件(114)和小拇指件(115),其中大拇指件(111)设于手掌件(12)的一侧边,食指件(112)、中指件(113)、无名指件(114)和小拇指件(115)设于手掌件(12)的前端;所述的大拇指件(111)设有两个指节,包括铰接的第一指节(1101)和第三指节(1103),其余手指件(11)均设有三个指节,包括依次分别铰接的第一指节(1101)、第二指节(1102)和第三指节(1103);所述的第三指节(1103)下端与手掌件(12)铰接。3.根据权利要求2所述的一种基于脑电波控制的仿生3d打印机械手,其特征在于,所述的第一指节(1101)包括固定连接的指尖(1104)和凸型件(1105),所述的第二指节(1102)包括固定连接的凸型件(1105)和凹型件(1106),所述的第三指节(1103)包括固定连接的两个凹型件(1106);所述的第三指节(1103)一端的凹型件(1106)与设于手掌件(12)前端的凸型件(1105)铰接,另一端的凹型件(1106)与第二指节(1102)的凸型件(1105)铰接,第二指节(1102)的凹型件(1106)与第一指节(1101)的凸型件(1105)铰接;或者,所述的第三指节(1103)一端的凹型件(1106)与设于手掌件(12)前端的凸型件(1105)铰接,另一端的凹型件(1106)与第一指节(1101)的凸型件(1105)铰接。4.根据权利要求3所述的一种基于脑电波控制的仿生3d打印机械手,其特征在于,所述的手掌件(12)和指节内部设有若干个容连接绳(6)通过的通道,所述的凸型件(1105)的铰接处设有v型通道,实现连接绳(6)的转向;所述的指尖(1104)前端设有容连接绳(6)通过的开孔,实现连接绳(6)的转向;连接绳(6)由舵机组引出,分别通过设置于手掌件(12)和指节内部的通道,并经v型通道或指尖(1104)的开孔转向后,再由设置于手掌件(12)和指节内部的通道返回舵机组。5.根据权利要求4所述的一种基于脑电波控制的仿生3d打印机械手,其特征在于,所述的连接绳(6)由若干股编织线构成。6.根据权利要求1所述的一种基于脑电波控制的仿生3d打印机械手,其特征在于,所述的手掌件(12)包括与大拇指件(111)连接的第一指根块(121)、与食指件(112)和中指件(113)连接的第二指根块(122)、与无名指件(114)连接的第三指根块(123)以及与小拇指件(115)连接的第四指根块(124),所述的第一指根块(121)、第三指根块(123)和第四指根块(124)分别与第二指根块(122)铰接,所述的第二指根块(122)与手腕部(2)铰接。7.根据权利要求1所述的一种基于脑电波控制的仿生3d打印机械手,其特征在于,所述的手腕部(2)包括转动连接的旋转腕(21)和手腕(22);所述的旋转腕(21)呈u型,两侧的耳板与手掌件(12)铰接,通过舵机组控制连接绳(6)实现手掌件(12)沿两耳板连线旋转;所述的手腕(22)内部设置有齿轮组(4),通过舵机组驱动,实现旋转腕(21)沿手腕部
(2)轴线旋转。8.根据权利要求7所述的一种基于脑电波控制的仿生3d打印机械手,其特征在于,所述的舵机组包括设置于手腕部(2)内的第一舵机组(51)和设置于手臂部(3)内的第二舵机组(52);所述的第一舵机组(51)控制手腕部(2)的转动,所述的第二舵机组(52)控制指节和手掌件(12)的旋转。9.根据权利要求8所述的一种基于脑电波控制的仿生3d打印机械手,其特征在于,所述的舵机组通过舵机座安装于机械手内部;所述的舵机组中舵机的数量与机械手的自由度相等,第二舵机组(52)中的每个舵机各控制一根连接绳(6),第一舵机组(51)中的舵机控制齿轮组(4);所述的舵机组中舵机均为360度舵机。10.根据权利要求1所述的一种基于脑电波控制的仿生3d打印机械手,其特征在于,所述的手臂部(3)内还设有控制器和电源;所述的控制器包括信号传输模块和控制芯片,所述的控制芯片接收信号传输模块接受的信号,控制各部件的动作;所述的电源通过无线的方式进行充电。
技术总结
本发明涉及一种机械手,具体涉及一种基于脑电波控制的仿生3D打印机械手,包括转动连接的手部和手腕部、与手腕部固定连接的手臂部,以及设置于机械手内部的舵机组;手部包括手掌件以及铰接于手掌件上的若干个手指件,每个手指件设有若干个指节,相邻指节铰接;舵机组通过连接绳控制单个指节、手指件或手掌件的独立转动;连接绳由舵机组引出,在分别绕过指节、手掌件或手腕部后,返回舵机组。与现有技术相比,本发明可以精确、快速地控制手指转动;每个关节可以单独控制,更加灵活;每个关节各通过一根绳子控制,简单方便;采用无线充电的方式进行充电,以及脑电波进行控制,使用起来更加方便简单。便简单。便简单。
技术研发人员:潘铭杰 刘政军 陈柯宇 王晓雨 贺李玥 戴园城 姚秋艳
受保护的技术使用者:上海建桥学院有限责任公司
技术研发日:2021.09.27
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。