1.本发明涉及图像形成装置。
背景技术:
2.近年来,具备打印机、传真机、复印机、复合机等多种功能的图像形成装置正在广泛普及。在该图像形成装置中,基于图像数据在感光体上形成潜像,并利用显影材料将该潜像显影,然后,将其直接或者经由中间转印带转印至纸张上。在图像的转印时,通过将由转印辊、转印带构成的转印部件压接于由感光体、中间转印带构成的像载体,并将纸张插入到压接部分(也被称为转印捏合部)从而将调色剂像转印到纸张上。
3.虽然转印部件能够通过压接于被旋转驱动的像载体从而从动于像载体,但是在转印部件被施加了负荷的情况下,从动变得困难,有时需要旋转驱动转印部件的转印部驱动部。例如,在为了去除附着于转印部件的调色剂像而设置了清洁部的情况下,由于要将刮刀等压接于转印辊、转印带等转印部件的表面,因此因该压接会对转印部件施加负荷。因此,在上述图像形成装置中设置了用于驱动转印部件的转印部驱动部。
4.在以这种方式分别旋转驱动像载体以及转印部件的情况下,需要避免转印部件的旋转对像载体的旋转造成影响而损害图像形成精度。
5.因此,例如,在专利文献1中,根据清洁部件的使用历史和空气中的水分量的至少一方而控制赋予转印部件的驱动力,由此减轻了转印部件的旋转施加于像载体的负荷的变动。进一步地,在专利文献1中,通过在转印部件的驱动系统中设置转矩限制器,一边将限制器值设为转印部件的负荷(主要来自清洁部件) α,一边将转印部件设定为比像载体稍快地旋转并在转印部件的压接状态下使转印部件稍微( α的转矩:成为周期性速度变动等引起的变动不会反转的范围的值)按压像载体,并在该状态下使转矩限制器工作,从而使得施加于像载体的转矩与转印部件上有无纸张无关地成为恒定。
6.然而,在将转印部件压接于像载体(这里是中间转印带)并旋转驱动时,当使纸张通过压接部时,转印部件的旋转直径仅以纸张的厚度的量发生变化。由此,存在如下问题:当进行恒速控制使得转印部件以恒定速度旋转时,施加于像载体的转矩以纸张的经过周期发生变化,结果会导致像载体发生速度变化,从而产生诸如色差(彩色光阻(color
‑
register)性能的恶化)等,损害图像形成精度。此外,在利用转矩限制器的方法中,存在在转印部件侧的负荷(主要来自清洁部件)的变动(经时/环境)较大的情况下,无法设定限制器值的问题。
7.为了应对这样的转印部件等的转矩变化,例如,在专利文献2中,提出了一种图像形成装置,在转印部件与像载体的分离时,根据反馈控制对转印部件以及像载体进行恒速控制使得转印部件以及像载体的旋转速度成为恒定速度,在转印部件与像载体的压接时,根据在转印部件的分离时检测到的进行了恒速控制时的恒速时驱动转矩,对转印部件进行恒转矩控制。
8.现有技术文献
9.专利文献
10.专利文献1:日本特开第2008
‑
304552号公报
11.专利文献2:日本专利第5585770号公报
技术实现要素:
12.发明要解决的课题
13.然而,由于像载体、转印部件的驱动辊的外径、或者像载体、转印部件的厚度等部件偏差,有时像载体与转印部件会产生表面速度差。针对该速度差,目前尚不存在使像载体与转印部件的表面速度一致的技术。因此,存在像载体与转印部件产生表面速度差,在转印时发生图像偏差的情况。这样一来,由于部件偏差等导致进行压接的两个旋转体产生表面速度差从而发生加工质量的劣化的现象,不仅是在像载体与转印部件之间发生的现象,也会在感光体与转印体之间、感光体与中间转印带之间、中间转印带与二次转印部件之间、以及定影上部件与定影下部件之间发生。
14.本发明的课题在于,在图像形成装置中通过抑制进行压接的两个旋转部件的表面速度差,从而抑制加工质量的劣化。
15.用于解决课题的手段
16.为了解决上述课题,技术方案1所述的发明是一种图像形成装置,其具备:第一旋转部件;以及第二旋转部件,相对于所述第一旋转部件能够压接、分离,
17.其中,所述图像形成装置具备:
18.控制部,基于所述第二旋转部件相对于所述第一旋转部件分离时和压接时的所述第二旋转部件的速度变化,设定所述第二旋转部件的目标速度。
19.技术方案2所述的发明是,在技术方案1所述的发明中,
20.所述控制部获取所述第二旋转部件相对于所述第一旋转部件分离时和压接时的所述第二旋转部件的速度信息,并基于所述获取的速度信息,确定表面速度与所述第一旋转部件一致的所述第二旋转部件的速度并设定为所述目标速度。
21.技术方案3所述的发明是,在技术方案1或2所述的发明中,
22.所述控制部能够进行对所述第二旋转部件以恒定速度进行旋转驱动的恒速控制以及以恒定转矩进行旋转驱动的恒转矩控制,在使所述第二旋转部件相对于所述第一旋转部件分离的状态下进行所述恒速控制,并基于此时检测出的恒速时驱动转矩,在将所述第二旋转部件压接于所述第一旋转部件的状态下进行所述恒转矩控制。
23.技术方案4所述的发明是,在技术方案1至3中任一项所述的发明中,
24.所述控制部,使所述第一旋转部件以恒定速度旋转;改变第一速度并实施多次如下动作:在使所述第二旋转部件相对于所述第一旋转部件分离的状态下以所述第一速度驱动所述第二旋转部件,然后压接于所述第一旋转部件,并在压接状态下获取所述第二旋转部件的速度的动作;基于所述第一速度以及所述获取的速度,设定所述第二旋转部件的目标速度。
25.技术方案5所述的发明是,在技术方案4所述的发明中,
26.所述控制部以比所述第一旋转部件快的速度和以比所述第一旋转部件慢的速度的至少两种速度驱动所述第二旋转部件,分别获取所述分离时和所述压接时的所述第二旋
转部件的速度,并基于所述获取的速度,设定所述第二旋转部件的目标速度。
27.技术方案6所述的发明是,在技术方案4所述的发明中,
28.所述控制部将所述压接时获取的所述第二旋转部件的速度设为下一个所述第一速度,实施多次所述动作。
29.技术方案7所述的发明是,在技术方案6所述的发明中,
30.所述控制部反复实施所述动作,直到所述第一速度、与在以所述第一速度驱动所述第二旋转部件时的所述压接时获取的所述第二旋转部件的速度、之间的速度差小于规定的阈值。
31.技术方案8所述的发明是,在技术方案1至7中任一项所述的发明中,
32.所述第一旋转部件为感光体,所述第二旋转部件为转印部件。
33.技术方案9所述的发明是,在技术方案1至7中任一项所述的发明中,
34.所述第一旋转部件为感光体,所述第二旋转部件为中间转印体。
35.技术方案10所述的发明是,在技术方案1至7中任一项所述的发明中,
36.所述第一旋转部件为中间转印体,所述第二旋转部件为二次转印部件。
37.技术方案11所述的发明是,在技术方案1至7中任一项所述的发明中,
38.所述第一旋转部件为定影上部件,所述第二旋转部件为定影下部件。
39.发明的效果
40.根据本发明,在图像形成装置中,能够抑制进行压接的两个旋转部件的表面速度差,因此能够抑制加工质量的劣化。
附图说明
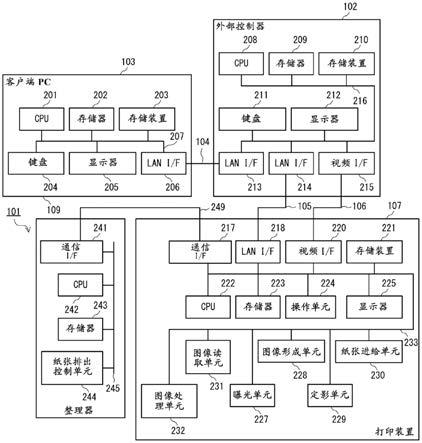
41.图1是表示应用了本发明的实施方式的图像形成装置的概略结构的图。
42.图2是表示图像形成装置的主要功能结构的框图。
43.图3(a)以及图3(b)是表示中间转印带以及二次转印带周边的结构的图。
44.图4是与中间转印带以及二次转印带的控制相关的电路框图。
45.图5是表示基于控制部的中间转印带以及二次转印带的控制过程的流程图。
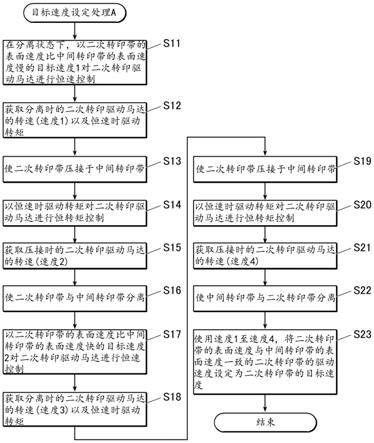
46.图6是表示目标速度设定处理a的流程的流程图。
47.图7(a)是表示图6的步骤s11至步骤s15中的二次转印驱动马达的转速的时间变化的曲线图,图7(b)是表示图6的步骤s17至步骤s21中的二次转印驱动马达的转速的时间变化的曲线图,图7(c)是将图7(a)和图7(b)的曲线图重叠表示的图。
48.图8是表示目标速度设定处理b的流程的流程图。
49.附图标记说明
50.1 图像形成装置
51.10 控制部
52.11 存储部
53.12 操作部
54.13 显示部
55.14 接口
56.15 扫描仪
57.16 图像处理部
58.17 图像形成部
59.174 中间转印带
60.41 中间转印驱动辊
61.41a 中间转印驱动马达
62.41b 中间转印驱动传递机构
63.42 中间转印从动辊
64.61 二次转印驱动辊
65.61a 二次转印驱动马达
66.61b 二次转印驱动传递机构
67.62 二次转印从动辊
68.63 二次转印带
69.64 二次转印清洁部
70.64a 清洁刮刀
71.65 压接/分离机构
72.65a 压接/分离马达
73.65b 压接/分离传递机构
74.176 二次转印辊
75.18 定影部
76.181 定影上部件
77.182 定影下部件
78.19 输送部
79.21 总线
80.s 纸张
具体实施方式
81.下面,基于附图对本发明的图像形成装置的实施方式进行说明。另外,在本发明的实施方式中,列举彩色的图像形成装置为例子进行说明,但本发明不限于此,也能够应用于例如黑白的图像形成装置。
82.<第一实施方式>
83.(图像形成装置的结构)
84.图1是表示本发明的第一实施方式的图像形成装置1的概略结构的图。图2是表示图像形成装置1的主要功能结构的框图。
85.图像形成装置1具备:具有cpu101(central processing unit,中央处理单元)、ram102(random access memory,随机存取存储器)以及rom103(read only memory,只读存储器)的控制部10;存储部11;操作部12;显示部13;接口14;扫描仪15;图像处理部16;图像形成部17;定影部18以及输送部19等。
86.作为控制单元的控制部10经由总线21而与存储部11、操作部12、显示部13、接口14、扫描仪15、图像处理部16、图像形成部17、定影部18以及输送部19连接。
87.cpu101读取rom103或存储部11中存储的控制用程序并执行,进行各种运算处理。
88.ram102向cpu101提供作业用的存储器空间,存储临时数据。
89.rom103存储由cpu101执行的各种控制用的程序、设定数据等。另外,也可以代替rom103而使用eeprom(electrically erasable programmable read only memory,电可擦除可编程只读存储器)、闪存等可改写的非易失性存储器。
90.具备这些cpu101、ram102以及rom103的控制部10依照上述各种控制用程序对图像形成装置1的各部进行集中控制。例如,控制部10使图像处理部16进行针对图像数据的规定的图像处理并存储至存储部11。此外,控制部10使输送部19输送纸张,并基于存储部11中存储的图像数据,通过图像形成部17在纸张上形成图像。
91.存储部11由作为半导体存储器的dram(dynamic random access memory,动态随机存取存储器)、hdd(hard disk drive,硬盘驱动器)等存储单元构成,并存储通过扫描仪15获取的图像数据、经由接口14而从外部输入的图像数据、各种设定信息等。另外,也可以将这些图像数据等存储于ram102。
92.操作部12具备操作键、在显示部13的画面上重叠配置的触摸面板等输入设备,并将针对这些输入设备的输入操作变换为操作信号而输出至控制部10。
93.显示部13具备lcd(liquid crystal display,液晶显示器)等显示装置,并显示图像形成装置1的状态、表示对触摸面板的输入操作的内容的操作画面等。
94.接口14是与外部的计算机、其它图像形成装置等之间进行数据的发送接收的单元,例如,由各种串行接口中的任一种构成。
95.扫描仪15读取形成于纸张上的图像,生成包含r(红)、g(绿)以及b(蓝)的每种颜色分量的单色图像数据的图像数据并存储至存储部11。
96.图像处理部16具备例如光栅化处理部、颜色变换部、浓淡度校正部、半色调处理部,对存储部11中存储的图像数据实施各种图像处理并存储至存储部11。
97.图像形成部17基于存储部11中存储的图像数据,在纸张上形成图像。图像形成部17具备分别与c(青)、m(品红)、y(黄)以及k(黑)的颜色分量对应的四组曝光部171、感光体172以及显影部173。此外,图像形成部17具备作为像载体的中间转印带(中间转印体)174、一次转印辊175、以及二次转印辊176。
98.曝光部171具备作为发光元件的ld(laser diode,激光二极管)。曝光部171基于图像数据来驱动ld,将激光照射至带电的感光体172上并进行曝光,从而在感光体172上形成静电潜像。显影部173通过带电的显影辊将规定的颜色(c、m、y以及k中的任一中)的调色剂(色料)供给至曝光后的感光体172上,并对形成于感光体172上的静电潜像进行显影。
99.将通过各个c、m、y以及k的调色剂而形成于与c、m、y以及k对应的四个感光体172上的图像(单色图像)从各感光体172依次重叠并转印到中间转印带174上。
100.中间转印带174(相当第一旋转部件)是悬挂并可旋转地支撑于以中间转印驱动辊41为代表的多个辊的半导电性环形带,并伴随辊的旋转而被旋转驱动。中间转印带174在调色剂像的转印时随着各辊的旋转而旋转。
101.通过一次转印辊175将该中间转印带174压接于对置的各个感光体172。一次转印辊175中分别流过与所施加的电压相应的转印电流。由此,显影于各感光体172的表面的各调色剂像,分别通过各个一次转印辊175而被依次转印(一次转印)至中间转印带174。
102.二次转印辊176经由二次转印带63压接于中间转印带174并进行旋转,由此将被转印至中间转印带174而形成的ymck各颜色的调色剂像转印(二次转印)至从供纸部输送的纸张上。通过未图示的清洁部去除中间转印带174的残留调色剂。
103.另外,关于中间转印带174以及二次转印辊176(二次转印带63)周边的结构,将在后文详细描述。
104.定影部18具有具备加热单元的定影上部件181以及定影下部件182,并对转印了调色剂的纸张进行加热以及加压,从而进行使调色剂定影至纸张的定影处理。
105.通过未图示的弹性部件沿靠近定影上部件181的方向对定影下部件182施力,通过在将定影下部件182压接于定影上部件181的状态下使定影上部件181以及定影下部件182旋转,从而构成挟持纸张并输送的定影捏合部。
106.另外,也可以将未图示的定影带展开架设于具有加热单元的辊的外周而构成定影上部件181。
107.如图1所示,输送部19具备多个在挟持纸张的状态下旋转从而输送纸张的纸张输送辊,并以规定的输送路径输送纸张。
108.下面,对中间转印带174以及二次转印带63周边的结构进行详细说明。
109.图3(a)、图(b)是表示图像形成装置1中的中间转印带174以及二次转印带63周边的结构的图。
110.如图3(a)、图(b)所示,中间转印带174架设于中间转印驱动辊41、中间转印从动辊42等。
111.此外,靠近中间转印带174而配置有二次转印辊176。作为二次转印部件的二次转印带63(相当于第二旋转部件)经由二次转印驱动辊61、二次转印从动辊62而架设于二次转印辊176。此外,二次转印清洁部64的清洁刮刀64a与二次转印带63抵接,从而能够进行二次转印带63表面的清洁。
112.进一步地,具备使二次转印辊176、二次转印驱动辊61、二次转印从动辊62、二次转印带63、以及二次转印清洁部64一体地移动的压接/分离机构65,使得二次转印带63(二次转印辊176)相对于中间转印带174压接、分离。压接/分离机构65可以采用已知的结构,作为本发明,对于其结构不作特别限定。
113.图3(a)表示二次转印带63(二次转印辊176)相对于中间转印带174分离的状态,图3(b)表示二次转印带63(二次转印辊176)相对于中间转印带174压接的状态。
114.图4是与图像形成装置1中的中间转印带174以及二次转印带63的控制相关的电路框图。
115.控制部10进行驱动中间转印带174、二次转印带63、以及压接/分离机构65的驱动马达等的控制。
116.如图4所示,中间转印驱动马达41a能够被控制地连接于控制部10,并对使中间转印带174旋转的中间转印驱动辊41进行旋转驱动。中间转印驱动辊41经由中间转印驱动传递机构41b连接于中间转印驱动马达41a的驱动轴。
117.中间转印驱动马达41a由dc无刷马达构成。控制部10将控制中间转印驱动马达41a的速度、转矩的pwm(pulse width modulation,脉冲宽度调制)信号作为转矩指令值发送至中间转印驱动马达41a。中间转印驱动马达41a基于从控制部10发送的转矩指令值进行驱
动,并通过该驱动使中间转印驱动辊41旋转。
118.在中间转印驱动马达41a安装有未图示的旋转传感器。旋转传感器检测中间转印驱动马达41a的转速(每单位时间的转速,即旋转速度),并将检测结果作为中间转印带174的速度信息反馈给控制部10。另外,旋转传感器可以使用霍尔元件等已知的旋转传感器,作为本发明不限于特定的旋转传感器。
119.此外,二次转印驱动马达61a能够被控制地连接于控制部10,并对使二次转印带63旋转的二次转印驱动辊61进行旋转驱动。所述二次转印驱动辊61经由二次转印驱动传递机构61b连接于二次转印驱动马达61a的驱动轴。
120.二次转印驱动马达61a由dc无刷马达构成。控制部10将控制二次转印驱动马达61a的速度、转矩的pwm信号作为转矩指令值发送至二次转印驱动马达61a。二次转印驱动马达61a基于从控制部10发送的转矩指令值进行驱动,通过该驱动对二次转印驱动辊61进行旋转驱动,从而使二次转印带63旋转。
121.在二次转印驱动马达61a安装有未图示的旋转传感器。旋转传感器检测二次转印驱动马达61a的转速(每单位时间的转速,即旋转速度),并将检测结果作为二次转印带63的速度信息反馈给控制部10。另外,旋转传感器可以使用霍尔元件等已知的旋转传感器,作为本发明,不限于特定的旋转传感器。
122.进一步地,压接/分离马达65a能够被控制地连接于控制部10。压接/分离机构65经由压接/分离传递机构65b而连接于压接/分离马达65a的驱动轴。通过压接/分离马达65a、压接/分离传递机构65b、以及压接/分离机构65,使二次转印带63以相对于中间转印带174压接、分离的方式移动。
123.在压接/分离机构65安装有检测二次转印辊176等的位置的位置传感器。位置传感器检测二次转印辊176等的位置,并将检测结果作为压接/分离信息发送至控制部10。
124.控制部10将对基于压接/分离机构65的压接/分离动作进行控制的动作指令值发送至压接/分离马达65a。
125.接下来,对由控制部10进行的中间转印带174以及二次转印带63的控制动作进行说明。
126.在控制部10中,伴随图像形成装置1的图像形成动作,使中间转印带174以规定的速度(目标速度)恒速旋转。对于中间转印带174的速度控制而言,将包含pwm信号的转矩指令值发送至中间转印驱动马达41a以获得目标速度,使中间转印驱动辊41恒速旋转。与获得上述目标速度的pwm信号相关的信息预先存储于存储部11,在控制部10中,从存储部11中读取该信息而生成pwm信号。
127.此外,通过未图示的旋转传感器检测中间转印驱动马达41a的转速,并将检测结果作为中间转印带174的速度信息反馈给控制部10。控制部10判定所反馈的速度信息是否落入设定范围内,在落入设定范围内的情况下,转矩指令值保持不变。在低于设定范围的情况下,生成与增加后的转矩指令值对应的pwm信号并驱动控制中间转印驱动马达41a,在高于设定范围的情况下,生成与减少后的转矩指令值对应的pwm信号并驱动控制中间转印驱动马达41a以使马达41a的速度成为设定范围内的速度。由此,进行恒速控制使得中间转印带174以恒定速度旋转。
128.另一方面,在二次转印带63与中间转印带174压接的情况下和分离的情况下进行
不同的旋转控制。
129.控制部1当检测到二次转印带63相对于中间转印带174处于分离状态时,使二次转印带63以规定的速度(目标速度)恒速旋转。即,将包含pwm信号的转矩指令值发送至二次转印驱动马达61a以获得目标速度,并使二次转印驱动辊61以恒速旋转。与获得上述目标速度的pwm信号相关的信息预先存储于存储部11,控制部10从存储部11中读取该信息并生成pwm信号。
130.另外,关于二次转印带63相对于中间转印带174是否处于分离、压接状态,能够使用对二次转印带63、伴随压接/分离动作而与二次转印带63一同移动的二次转印辊176等部件的位置进行检测的位置传感器,并基于该传感器的检测结果来判定二次转印带63的分离、压接状态。
131.此外,通过未图示的旋转传感器检测二次转印驱动马达61a的旋转,并将检测结果作为二次转印带63的速度信息反馈给控制部10。控制部10判定所反馈的速度信息是否落入预先设定的速度范围内,在落入设定范围内的情况下,转矩指令值保持不变。在低于设定范围的情况下,生成与增加后的转矩指令值对应的pwm信号并驱动控制二次转印驱动马达61a,在高于设定范围的情况下,生成与减少后的转矩指令值对应的pwm信号并驱动控制二次转印驱动马达61a以使马达61a的速度成为设定范围内的速度。由此,进行恒速控制使得二次转印带63以恒定速度旋转。
132.另外,在对二次转印带63进行恒速控制时,检测二次转印驱动马达61a中的驱动转矩作为恒速时驱动转矩。为了进行二次转印驱动马达61a中的驱动转矩的检测,可以将转矩检测器连接于二次转印驱动马达61a,并使用该转矩检测器的测量结果。作为该转矩检测器,还存在使转矩检测器介于二次转印驱动马达61a与二次转印驱动辊61之间并根据其扭转量等检测驱动转矩的转矩检测器。此外,在如上述那样使用pwm信号的装置中,控制部10能够在恒速控制时对成为转矩指令值的pwm信号本身进行分析以进行转矩检测。另外,在恒速时驱动转矩的检测中,期望采用变动偏差较小的值,例如采用规定时间内检测到的转矩值的平均值等。此外,若恒速时驱动转矩的检测时间落入能够检测的时间内,则能够任意地设定,不需要在整个能够检测的时间进行检测。
133.以上,对二次转印带63与中间转印带174分离的状态下的驱动控制进行了上述说明,下面,对二次转印带63与中间转印带174压接的状态下的驱动控制进行说明。
134.在二次转印带63压接于中间转印带174的状态下,控制部10根据在二次转印带63的恒速控制时检测到的二次转印驱动马达61a的恒速时驱动转矩,进行恒转矩控制使得二次转印驱动马达61a的驱动转矩恒定。即,在恒转矩控制中,控制部10基于pwm信号与转矩指令值之间的关系来生成与恒速时驱动转矩对应的pwm信号并驱动二次转印驱动马达61a。在恒转矩控制中,即使在二次转印带63与中间转印带174的抵接部上走纸时,也将二次转印驱动马达61a控制为恒定转矩,因此能够良好地进行图像形成而无需对中间转印带174侧施加转矩变动。
135.接下来,基于图5的流程图对基于控制部10的中间转印带174以及二次转印带63的控制过程进行说明。
136.首先,在二次转印带63相对于中间转印带174分离的状态下,如上述那样,控制部10根据反馈对中间转印驱动马达41a以及二次转印驱动马达61a进行恒速控制,使得中间转
印带174以及二次转印带63成为恒定速度(步骤s1)。
137.控制部10基于存储部11中存储的(设定的)、和与中间转印带174的目标速度对应的pwm信号相关的信息,使中间转印驱动马达41a旋转。此外,基于存储部11中存储的(设定的)、和与二次转印带63的目标速度对应的pwm信号相关的信息使二次转印驱动马达61a旋转。
138.此外,控制部10在对二次转印驱动马达61a进行恒速控制的期间,基于pwm信号检测二次转印驱动马达61a的驱动转矩。计算所检测到的驱动转矩的平均转矩值,作为恒速时驱动转矩。恒速时驱动转矩的决定可以通过中间值等其它适当的方法来决定,作为本发明,不限于特定的方法。
139.接着,控制部10启动用于将二次转印带63压接至中间转印带174的压接/分离马达65a(步骤s2)。
140.当压接完成时(步骤s3,是(yes)),控制部10持续进行中间转印驱动马达41a的恒速控制,并且基于上述检测到的恒速时驱动转矩对二次转印驱动马达61a进行恒转矩控制(步骤s4)。
141.另外,虽未图示,但在使二次转印带63从中间转印带174分离时,对于二次转印驱动马达61a,控制部10从恒转矩控制切换为上述的基于恒定速度的恒速控制。
142.此外,上述从分离至压接的切换,例如可以伴随图像形成的开始而进行。此外,从压接至分离的切换,可以伴随作业以及预约作业的结束而进行。因此,上述二次转印驱动马达61a的恒速时驱动转矩的检测、以及与恒速时驱动转矩相应的二次转印驱动马达61a的恒转矩控制,例如可以在从一系列作业的结束至开始的每一次进行,能够调整恒转矩控制中的转矩值,同时以适当的转矩值进行旋转控制。例如,即使在二次转印驱动马达61a中的负荷转矩由于二次转印清洁部64的清洁刮刀64a的磨损等而发生变动的情况下,也能够进行与该变动相应的转矩调整。
143.此外,在上述中,对伴随一系列作业的结束、开始而进行恒速时驱动转矩的检测、与恒速时驱动转矩相应的二次转印驱动马达61a的恒转矩控制进行了说明,但是在一系列作业的持续时间较长的情况下(例如达到十小时以上的情况下),会考虑负荷转矩的变动风险,因此,还能够在作业期间等暂时性地使二次转印带63从中间转印带174分离,在对驱动二次转印带63的二次转印驱动马达61a进行恒速控制并进行恒速时驱动转矩的检测之后,再次使二次转印带63压接于中间转印带174,并通过修正后的转矩对二次转印驱动马达61a进行恒转矩控制。由此,即使在连续进行作业的情况下也能够根据负荷转矩的变动适当地进行二次转印带63的控制。
144.这里,例如,图3(a)所示的中间转印驱动辊41、二次转印驱动辊61存在外形公差。在将作为中间转印驱动辊41的驱动源的中间转印驱动马达41a的旋转速度(转速)设为恒定时,在中间转印驱动辊41的外形增大0.1%的情况下,中间转印带174的表面速度加快0.1%。同样地,在将作为二次转印驱动辊61的驱动源的二次转印驱动马达61a的旋转速度设为恒定时,在二次转印驱动辊61的外形增大0.1%的情况下,二次转印带63的表面速度加快0.1%。该辊的外形公差作为偏差而产生,因此在部件更换时或由于机器差异而产生。
145.另一方面,如图3(b)所示,在将中间转印带174与二次转印带63压接的情况下,需要在使中间转印带174与二次转印带63的表面速度差尽可能地小的状态下进行压接。但是,
如上述那样,当由于外形公差而导致中间转印带174与二次转印带63的表面速度存在差异时,中间转印带174的驱动力与二次转印带63的驱动力产生差异,在将图像转印至纸张时会产生转印偏差,导致加工质量劣化。
146.因此,在本实施方式中,例如在出厂时、在进行部件更换(会影响中间转印带174、二次转印带63的表面速度的中间转印驱动辊41、二次转印驱动辊61、中间转印带174、二次转印带63、以及二次转印辊176等部件的更换)时,控制部10执行图6所示的目标速度设定处理a,将二次转印带63的表面速度与中间转印带174的表面速度一致的二次转印带63的驱动速度设定为二次转印带63的目标速度。
147.在目标速度设定处理a中,首先,控制部10在使二次转印带63从中间转印带174分离的状态下,以二次转印带63的表面速度比中间转印带174的表面速度慢的目标速度1(相当于第一速度)驱动二次转印驱动马达61a,进行恒速控制(步骤s11)。
148.接着,控制部10获取对分离状态下的二次转印驱动马达61a进行恒速控制的期间的、二次转印驱动马达61a的转速(例如,恒速控制过程中检测到的每单位时间的转速的平均值。设为速度1。)作为分离时的二次转印带63的速度信息。此外,获取对二次转印驱动马达61a进行恒速控制期间的、二次转印驱动马达61a的恒速时驱动转矩(步骤s12)。
149.接着,控制部10通过压接/分离机构65使二次转印带63压接于中间转印带174(步骤s13),并基于步骤s12中获取的恒速时驱动转矩,对二次转印驱动马达61a进行恒转矩控制(步骤s14),获取进行恒转矩控制期间的、二次转印驱动马达61a的转速(例如,在恒转矩控制过程中检测到的每单位时间的转速的平均值。设为速度2。)作为压接时的二次转印带63的速度信息(步骤s15)。
150.图7(a)是表示步骤s11至步骤s15中的二次转印驱动马达61a的转速的时间变化的曲线图。由于恒速控制时的目标速度1是二次转印带63的表面速度比中间转印带174的表面速度慢的速度,因此当使二次转印带63压接于中间转印带174时,二次转印带63的表面速度会随着中间转印带174的表面速度而变快,从而二次转印驱动马达61a的旋转速度变快。即,二次转印驱动马达61a的转速增加。
151.接着,控制部10通过压接/分离机构65使二次转印带63从中间转印带174分离(步骤s16),以二次转印带63的表面速度比中间转印带174的表面速度快的目标速度2(相当于第一速度)驱动二次转印驱动马达61a,进行恒速控制(步骤s17)。
152.控制部10获取分离状态下对二次转印驱动马达61a进行恒速控制期间的、二次转印驱动马达61a的转速(例如,在恒速控制过程中检测到的每单位时间的转速的平均值。设为速度3。)作为分离时的二次转印带63的速度信息。此外,获取对二次转印驱动马达61a进行恒速控制的期间的、二次转印驱动马达61a的恒速时驱动转矩(步骤s18)。
153.接着,控制部10通过压接/分离机构65使二次转印带63压接于中间转印带174(步骤s19),并基于步骤s18中获取的恒速时驱动转矩对二次转印驱动马达61a进行恒转矩控制(步骤s20),获取进行恒转矩控制期间的、二次转印驱动马达61a的转速(例如,在恒转矩控制过程中检测到的每单位时间的转速的平均值。设为速度4。)(步骤s21)。
154.图7(b)是表示步骤s17至步骤s21中的二次转印驱动马达61a的转速的时间变化的曲线图。由于恒速控制时的目标速度2是二次转印带63的表面速度比中间转印带174的表面速度快的速度,因此当使二次转印带63压接于中间转印带174时,二次转印带63的表面速度
会随着中间转印带174的表面速度而变慢,从而二次转印驱动马达61a的旋转速度变慢。即,二次转印驱动马达61a的转速减少。
155.然后,控制部10基于获取的速度1至速度4,确定二次转印带63的表面速度与中间转印带174的表面速度一致的二次转印带63的驱动速度(二次转印驱动马达61a的转速),并将和与确定后的驱动速度对应的pwm信号相关的信息作为二次转印带63的恒速控制时的目标速度的设定信息存储(设定)至存储部11(步骤s23),并结束旋转速度设定处理a。
156.在步骤s23中,控制部10根据以下的线性插补公式(式1)计算二次转印带63的目标速度。
157.目标速度=速度2
‑
|速度2
‑
速度1|
×
(速度2
‑
速度4)/((速度4
‑
速度3)
‑
(速度2
‑
速度1))
……
(式1)
158.图7(c)是将图7(a)和图7(b)的曲线图重叠表示的图。例如,若将(式1)中的(速度2
‑
速度1)设为a、将(速度3
‑
速度4)设为b、将(速度4
‑
速度2)设为c,则将速度2与d=c
×
a/(a b)相加而得的值作为目标速度进行计算。
159.这样,根据目标速度设定处理a,能够抑制进行压接的中间转印带174与二次转印带63的表面速度差,因此,能够抑制例如转印偏差等图像形成装置中的加工质量的劣化。
160.在上述的目标速度设定处理a中,由于仅获取分离时和压接时的两次二次转印带63的速度变化即可,因此,能够以二次转印带63的速度信息的较少的测量次数进行精度较高的目标速度的计算。此外,通过使用二次转印带63比中间转印带174快的速度和慢的速度的双方来计算目标速度,从而能够进行考虑了压接时发生的中间转印带174与二次转印带63的滑动量的目标速度的计算。
161.<第二实施方式>
162.接下来,对本发明的第二实施方式进行说明。
163.第二实施方式中的图像形成装置1的结构、以及中间转印带174和二次转印辊176的控制过程与第一实施方式中说明的相同,因此引用该说明。在第二实施方式中,用于设定二次转印带63的目标速度的处理与第一实施方式不同。在第二实施方式中,在出厂时、在进行部件更换时,控制部10执行如图8所示的目标速度处理b。下面,参照图8对目标速度处理b进行说明。
164.在目标速度设定处理b中,首先,控制部10将第一速度(二次转印驱动马达61a的每单位时间的转速)n(n)设定为二次转印带63的驱动速度(步骤s31)。也可以将n(n)设定为任意的速度。
165.接着,在使二次转印带63从中间转印带174分离的状态下,控制部10将n(n)设为目标值,对二次转印驱动马达61a进行恒速控制(步骤s32)。
166.接着,控制部10获取对二次转印驱动马达61a进行恒速控制期间的、二次转印驱动马达61a的恒速时驱动转矩(步骤s33)。
167.接着,控制部10通过压接/分离机构65将二次转印带63压接于中间转印带174(步骤s34),并基于步骤s33中获取的恒速时驱动转矩对二次转印驱动马达61a进行恒转矩控制(步骤s35),获取进行恒转矩控制的期间的、二次转印驱动马达61a的转速(例如,恒转矩控制过程中检测到的每单位时间的转速的平均值)作为压接时的二次转印带63的速度信息,并设为n(n 1)(步骤s36)。
168.接着,控制部10判断n(n)与n(n 1)的速度差(|1
‑
n(n)/n(n 1)|)是否小于规定的阈值(这里,为0.1)(步骤s37)。
169.在判断为n(n)与n(n 1)的速度差不小于规定的阈值的情况下(步骤s37;否(no)),控制部10将n(n 1)设定为n(n)(步骤s38),并返回步骤s32,反复执行步骤s32至步骤s37。
170.通过反复执行步骤s32至步骤s37,从而能够使二次转印带63的表面速度与中间转印带174的表面速度大致一致。
171.在判断为n(n)与n(n 1)的速度差小于规定的阈值的情况下(步骤s37;yes(是)),控制部10将和与n(n 1)对应的pwm信号相关的信息作为二次转印带63的恒速控制时的目标速度的设定信息而存储(设定)至存储部11(步骤s39),并结束目标速度设定处理b。
172.这样,根据目标速度设定处理b,能够抑制进行压接的中间转印带174与二次转印带63的表面速度差,因此,能够抑制例如转印偏差等图像形成装置中的加工质量的劣化。
173.根据上述的目标速度设定处理b,具有即使在处理过程中发生了速度变动,目标速度的计算精度也不会恶化的优点。
174.此外,有时在处理过程中发生由负荷变动、噪声引起的速度变动,从而导致检测速度的可靠性降低。在第一实施方式中,在发生了上述的速度变动的情况下,根据基于线性插补进行计算的话会产生较大的误差,但在本方式中不容易产生较大的误差。
175.以上,基于上述实施方式对本发明进行了说明,但上述实施方式中的描述是本发明的图像形成装置的优选的一例,不限于此。
176.例如,在上述第一实施方式以及第二实施方式中,列举将本发明的第一旋转部件设为中间转印带174、将第二旋转部件设为二次转印带63的例子进行了说明,但本发明能够应用于在图像形成装置中的其它进行压接旋转的第一旋转部件和第二旋转部件中使第二旋转部件的表面速度与第一旋转部件的表面速度一致的情况下的第二旋转部件的目标速度的设定。例如,能够应用于将第一旋转部件设为感光体172、将第二旋转部件设为中间转印带174,使中间转印带174的表面速度与感光体172的表面速度一致的情况。此外,还能够应用于将第一旋转部件设为定影上部件181、定影下部件182,使定影下部件182的表面速度与定影上部件181的表面速度一致的情况。此外,还能够应用于将不进行中间转印的图像形成装置中的感光体设为第一旋转部件、将压接于感光体的转印体(转印辊等)设为第二旋转部件,使转印体的表面速度与感光体的表面速度一致的情况。此外,还能够应用于将不经由二次转印带而使二次转印辊直接压接于中间转印带的图像形成装置中的中间转印带设为第一旋转部件、将二次转印辊设为第二旋转部件,使二次转印辊的表面速度与中间转印带的表面速度一致的情况。
177.此外,在不脱离本发明的主旨的范围内能够对上述实施方式所示的结构、构造、控制内容、以及顺序等具体的细节进行适当的变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。