1.本技术涉及用于海船的系统,并且更具体地涉及用于控制海船上的外围设备的系统以及此类外围设备本身。
背景技术:
2.美国专利第9927520号公开了一种检测海船的碰撞的方法,该方法包括使用距离传感器进行感测,以确定物体是否在海船的预定距离内,以及确定物体相对于海船的方向。该方法还包括在推进控制输入设备处接收推进控制输入,以及确定推进控制输入的执行是否将导致海船的任何部分朝向物体移动。然后,生成碰撞警告。
3.美国专利第10745091号公开了一种海船导航灯具,其包括光源和保持光源的隔断子壳体。隔断子壳体具有主框架,该主框架具有第一横向相对的侧面和第二横向相对的侧面;第一侧壁和第二侧壁,其分别从主框架的第一侧和第二侧突出;以及第一隔断表面和第二隔断表面,其分别位于第一侧壁和第二侧壁上。第一隔断表面和第二隔断表面被配置成提供从光源发出的光在指定可见弧度之外的实际隔断。海船导航灯具还包括保持隔断子壳体的主壳体。一种用于海船导航灯具的照明器子组件,其包括着色部件,该着色部件具有的颜色与从照明器子组件发出的光的颜色处于相同的颜色族。着色部件可以是透镜、滤光器盖、印刷电路板(pcb)和/或指示器(telltale)。
技术实现要素:
4.提供本发明内容,以介绍下面将在具体实施方式中进一步描述的概念的选择。本发明内容既不旨在标识所要求保护的主题的关键或必要特征,也不旨在用作帮助限制所要求保护的主题的范围。
5.本公开涉及一种用于海船的系统,该系统包括外围设备,该外围设备具有致动器,该致动器被配置成在缩回位置和伸出位置之间移动外围设备的一部分。第一串行总线被配置成将外围设备连接到其他外围设备。控制器可操作地连接到致动器,并且与第一串行总线进行信号通信。传感器经由第二串行总线耦合到控制器。控制器被配置成响应于来自传感器的信息来起动致动器,以将外围设备的一部分从伸出位置移动到缩回位置,并且从缩回位置移动到伸出位置。
6.根据本公开的另一示例,用于海船的外围设备包括可移动部分,该可移动部分被配置成远离外围设备的固定部分伸出或从外围设备的固定部分伸出,并且朝向固定部分缩回或缩回到固定部分中。外围设备的致动器被配置成伸出和缩回可移动部分。外围设备的控制器可操作地连接到致动器,并且被配置成响应于来自传感器的信息来起动致动器,以伸出和缩回外围设备的可移动部分。控制器包括用于经由串行总线从传感器接收信息的收发器。
附图说明
7.参考以下附图描述了用于海船的系统及其外围设备的示例。在所有附图中,使用相同的附图标记来指代相同的特征和相同的部件。
8.图1图示了根据本公开的海船的一个示例。
9.图2图示了根据本公开的用于海船的系统的示例。
10.图3图示了根据本公开的算法的用于控制外围设备中的致动器的控制器的一个示例。
11.图4a图示了处于伸出构型的用于海船的灯。
12.图4b图示了处于缩回构型的灯。
13.图5a图示了处于伸出构型的用于海船的防滑板。
14.图5b图示了处于缩回构型的防滑板。
15.图6a图示了处于伸出构型的用于海船的天线或灯的第一示例。
16.图6b图示了处于缩回构型的天线或灯的第一示例。
17.图7a图示了处于伸出构型的用于海船的天线或灯的第二示例。
18.图7b图示了处于缩回构型的天线或灯的第二示例。
具体实施方式
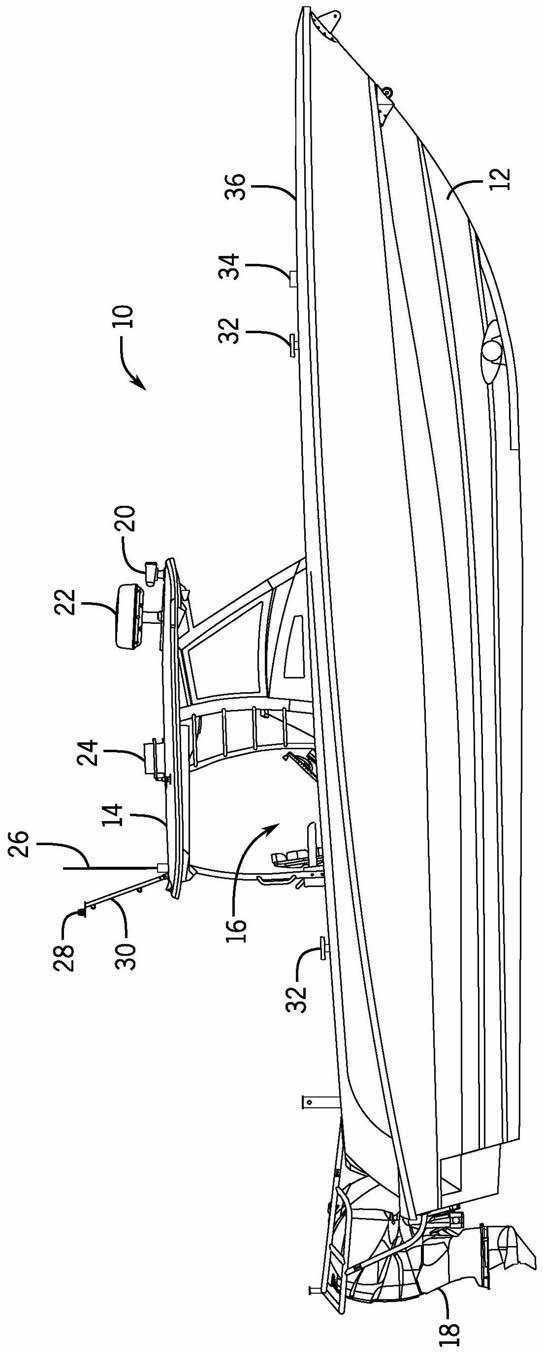
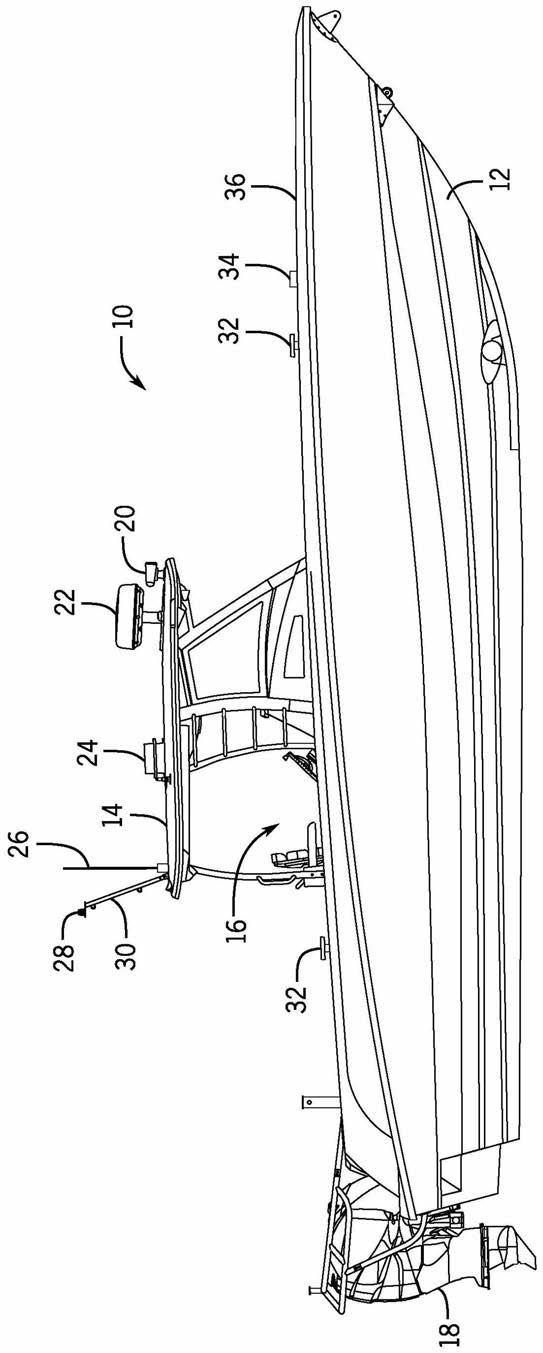
19.图1图示了海船10的一个示例,该海船10通常包括船体12和覆盖驾驶舱区域16的硬顶14。海船推进设备18(诸如例如此处所示的舷外电动机或发动机)被配置成通过水产生推力,以推动海船10。硬顶14支撑许多外围设备,所述外围设备包括摄像头20、接近传感器22(诸如此处所示的雷达)、导航传感器(诸如此处所示的全球定位系统接收器24)、超高频(vhf)天线26和由杆30支撑的全方位灯28。海船10上的其他外围设备包括在船舷(gunwale)36上的防滑板32和导航灯34(另一个设置在左舷上)。应该理解,海船10可配备有这些外围设备中的任何一个或全部,并且此类设备的尺寸、位置和/或数目可根据所论述的海船10、船东(owner)的偏好和/或政府法规而变化。下文将提供外围设备的更多细节。
20.现在转向图2,将描述根据本公开的系统38。系统38包括串行总线40,诸如使用nmea 2000(“n2k”)协议的控制器局域网(“can”)总线,该协议是用于海船应用的通信标准。在一个示例中,串行总线40是海船10上的主can总线,驾驶舱区域16中的舵控制模块和海船推进设备18中的发动机/电动机控制模块连接到该总线。
21.远程信息处理控制模块(“tcm”)42连接到串行总线40。tcm 42可经由任何适当的无线协议将来自位于若干外围设备46、50、66a
‑
c上或其附近的无线传感器(未示出)的信息中继到云44。用户可从云44访问来自无线传感器的信息。数字切换模块(“dsm”)49也链接到串行总线40。dsm 49经由串行总线40从多功能显示器(“mfd”)或键盘51和/或从有线连接到dsm 49的一个或多个按钮或开关(未示出)接收输入。响应于所述输入,起动或停用dsm 49中的固态继电器,以控制有线连接到dsm 49的外围设备46。附加传感器(未示出)也可有线连接到dsm 49。来自有线传感器的信息经由dsm 49传输到串行总线40。通过串行总线40,感测到的信息可被中继到tcm 42并从那里被中继到云44。dsm 49减少了对手动地将海船10上的每个外围设备(例如外围设备46)和传感器有线连接到mfd或键盘51的需求,以便用户能够控制外围设备46或查看来自传感器的信息。相反,dsm 49可远离mfd或键盘51进行放置,
并且通过串行总线40连接到mfd或键盘51。dsm 49有线连接到外围设备(一个或多个)46和有线传感器(一个或多个),其可比距mfd或键盘51更靠近dsm 49进行放置。
22.系统38还包括其中集成有控制器的至少一个外围设备。在此,两个外围设备50、66a分别设置有控制器54、70a。系统38还包括连接到控制器54、70a的附加串行总线58。在一个示例中,串行总线58也可以是使用n2k协议的can总线。串行总线58通过网关或网桥60链接到串行总线40,这取决于两个串行总线40、58是否使用相同的协议。(注意,一些海船部件使用不同版本的nmea协议,且/或总线58可以是lin总线。)由于对串行总线40上的节点数目的限制,且/或为了解决对海船10的物理限制,可能需要附加串行总线58。此外,可能需要提供最初分离的串行总线58,以连接下文中提到的所有外围设备(例如,灯、防滑板、天线)作为改造的一部分,因为此类设备中的至少一些以前尚未连接到串行总线,而是硬线连接到掌舵开关或者连接到dsm 49。然后,此类改造串行总线58可通过网关或网桥60连接到海船10上的现有串行总线40,而不必干扰已经与之建立的连接。在另一个示例中,串行总线40和58是单个总线。注意,尽管仅示出两个外围设备50、66a连接到串行总线58,但是附加外围设备也可连接到串行总线58。
23.如将在下文中更全面地描述,每个外围设备的控制器54、70a被配置成控制外围设备50、66a中的开关。例如,外围设备50和/或66a可被编程为响应于天气条件、地理位置、一天中的时间、周围照明条件、船速和/或感测到的在海船10外部的物体的接近度而移动。此类信息可经由串行总线(一个或多个)40、58从适当的传感器被中继,如将在下文中描述。此类信息可附加地或另选地是从其他用户的先前经验中收集的云44中的信息,并且可经由tcm 42和串行总线40、58被传送到外围设备50、66a。此外,外围设备的控制器54、70a可被配置成在系统38启动时将外围设备50、66a分级。例如,外围设备的控制器54、70a可被编程为将外围设备50、66a移动到预定位置,将外围设备50、66a打开或关闭,或者运行一系列事件,以在系统38启动时和/或在用户输入命令时测试外围设备的功能。
24.在本示例中,外围设备50、66a中的至少一个(即其中的一个或两个)是主外围设备,并且系统38还包括至少一个从属外围设备66b、66c,其通过附加串行总线62连接到主外围设备66a。在此,附加串行总线62是本地互连网络(“lin”)总线,其通常比can总线更便宜。主外围设备66a中的控制器70a可被编程为响应于来自串行总线58上的其他外围设备50的信息、来自下文描述的传感器的信息和/或来自云44的信息(经由tcm 42和串行总线40、58)来控制主外围设备66a的功能和/或从属外围设备66b、66c的功能。将在下文中参考图3更全面地描述控制器70a。注意,外围设备50也可链接到从属外围设备(未示出),并且其控制器54可充当主控制器。每个主控制器54、70a可控制与其连接的从属外围设备,以响应于天气条件、地理位置、一天中的时间、周围照明条件、船速和/或感测到的在海船10外部的物体的接近度,且/或为了在启动或用户输入命令时将海船10分级的目的而移动。
25.注意,dsm 49不需要通过单独的导线连接到具有控制器54、70a的外围设备50、66a。相反地,这些“智能”外围设备50、66a基于它们的控制器自身的命令、经由串行总线40、58的来自mfd或键盘51的信号、经由串行总线58的来自彼此的信号或这些中的任何一个的组合来起动。dsm 49可另选地用于控制不能受益于“智能”功能(诸如喇叭或挡风玻璃清洗液)的外围设备46。外围设备50、66a具有与系统无关的体系结构,该体系结构确保外围设备与替代船只系统的兼容性,oem可选择将这些设备集成到替代船只系统中,因为每个设备与
其自身的内部控制器54、70a“即插即用”。设备制造商可确保将来与给定船只系统的兼容性,即使当需要维修或更换时也是如此。此外,因为每个外围设备50、66a在边缘处进行计算,因此如果api网络在海船10上出故障,则系统38仍然可安全地运行。对于仅中央数字切换模块类型的布置,情况并不一定如此。
26.仍然参考图2,外围设备66a具有致动器68a,该致动器68a被配置成在缩回位置和伸出位置之间移动外围设备66a的一部分。控制器70a可操作地连接到致动器68a,并且如上所述,与串行总线62进行信号通信,该串行总线62被配置成将外围设备66a连接到相同类型的其他外围设备66b、66c。在该示例中,控制器70a位于外围设备66a上,或者位于外围设备66a中;然而,控制器可与外围设备66a分离,诸如在单独的壳体或模块中,并且经由串行总线58或62可操作地连接到致动器68a。至少一个传感器(例如,导航传感器74、接近传感器76、图像传感器78和/或船速传感器80)经由另一串行总线耦合到控制器70a。在所示的示例中,传感器74、76、78、80经由串行总线58、网关或网桥60和串行总线40耦合到控制器70a。在其他示例中,传感器74、76、78、80连接到与外围设备50、66a相同的总线58。在其他示例中,传感器74、76、78、80中的一些传感器连接到总线58,而另一些传感器连接到串行总线40。
27.在所示的示例中,外围设备66b、66c是与外围设备66a相同的类型(例如,所有外围设备66a
‑
c均是灯),并且每个均包括经由串行总线62耦合到控制器70a的致动器68b、68c。因此,控制器70a充当主控制器,并且控制所有外围设备的致动器68a、68b、68c。同时,外围设备50可以是与外围设备66a
‑
c不同的类型(例如,防滑板),并且其控制器54可控制其致动器52和在海船10上的其他防滑板中的致动器,其控制器54经由另一串行总线(未示出)连接到这些致动器。
28.导航传感器74可以是任何类型的导航传感器,其能够确定海船10在纬度和经度上的全球位置,任选地除了船只的航向、俯仰、横滚和偏航以外。例如,导航传感器74可以是如图1中的24所示的gps接收器。在其他示例中,导航传感器74可以是但不限于任何类型的gnss设备、差分gps、配备有惯性测量单元(imu)的gps、姿态和航向参考系统(ahrs)或gps辅助惯性导航系统。此类设备在本领域中是众所周知的,并且因此在此将不进一步进行描述。为本目的而工作的导航传感器74的一个示例是由威斯康星州(wisconsin)韦迪拉克郡(fond du lac)的水星海事公司(mercury marine)提供的零件编号8m0105389gps/imu kit。
29.接近传感器76可以是任何类型的接近传感器,其适合于确定外部物体相对于海船10的接近度。例如,接近传感器76可以是如图1中的22所示的雷达。在其他示例中,接近传感器76可以是声呐、激光、激光雷达、超声波或红外传感器。此类设备在本领域中是众所周知的,并且因此在此将不进一步进行描述。为本目的而工作的雷达单元的一个示例是英国费勒姆(fareham,united kingdom)的雷松公司(raymarine)提供的quantum 2。尽管如将在下面显而易见的那样,将接近传感器76定位在海船10的硬顶14上将具有特别的优点,但是接近传感器76可位于海船10上适合于感测海船10外部的物体的任何位置。相同或不同类型的多个接近传感器可设置在海船10上的不同位置处,以便感测到海船10的前方、上方、侧面和后面的物体。
30.图像传感器78是能够检测在海船10外部的物体的任何图像传感器,并且因此也可放置在海船10的硬顶14上或船首处。图像传感器78可以是电荷耦合器件(ccd)或有源像素
传感器(cmos),并且可以是红外或近红外摄像头的一部分。在另一个示例中,图像传感器78是作为热夜视摄像头的一部分的微测辐射热计图像传感器。含有图像传感器78的摄像头(例如,图1的摄像头20)可以是可枢转的和/或可旋转的,以便聚焦在感兴趣的外部物体上。具有为本目的而工作的图像传感器的摄像头的示例是由俄勒冈州威尔逊维尔(wilsonville,oregon)的菲力尔公司(flir systems)提供的m364c和m364
‑
lr。
31.船速传感器80是能够确定海船10的速度的任何传感器。船速传感器80可以是皮托管传感器(pitot tube sensor)、桨轮传感器(paddle wheel sensor)、超声波速度传感器或电磁速度传感器。在另一个示例中,来自导航传感器74的随时间变化的地理位置的各种读数可用于计算海船在地面上的速度。该计算可在导航传感器74本身中完成或通过外部控制器来完成。为本目的而工作的船速传感器80的一个示例是由新罕布什尔州米尔福德(milford,new hampshire)的艾尔玛公司(airmar)提供的零件编号31
‑
606
‑6‑
01。
32.通过研究和开发,本发明人已经认识到,为海船10上的外围设备中的至少一些设置内置控制器允许外围设备提供迄今为止海船外围设备无法实现的高级功能。此外,本发明人认识到,为此类外围设备的控制器提供来自一个或多个各种传感器的信息可以是有益的,因为它允许自动化此类外围设备的高级功能。例如,参考图2,外围设备66a中的控制器70a被配置成响应于来自传感器(一个或多个)74、76、78和/或80的信息来起动致动器68a,以将外围设备66a的一部分从伸出位置移动到缩回位置,并且从缩回位置移动到伸出位置。在以下参考图4
‑
7描述的示例中,外围设备是天线、灯、防滑板或摄像头,尽管如对于本领域普通技术人员将是显而易见的,其他外围设备可以类似的方式被致动。
33.图4a和图4b示出了其中外围设备66a是灯86的示例。例如,灯86可以是导航灯(例如,旨在指示海船10的特定侧面的红色或绿色的灯,诸如图1中所示的灯34)。在另一个示例中,灯86是全方位灯、桅灯或船尾灯。灯86包括固定部分88和可移动部分90。固定部分88可以是凹入到船舷36、硬顶14或海船10的其他表面中的壳体。可移动部分90可以是灯86的照明器部分,诸如灯引擎、透镜、滤光器以及支撑或容纳它们的任何部件。在灯86是侧灯的一个示例中,可移动部分90基本上类似于美国专利第10745091号中描述的设备,该专利通过引用并入本文。如图4b中所示,固定壳体88具有凹口92,其中可移动部分90可缩回到凹口92中。如图4a中所示,从缩回位置,可移动部分90可从固定部分88伸出。可移动部分90的此类缩回和伸出由致动器68a提供,该致动器68a可以是电动机(步进电动机或伺服电动机)、机电致动器、气动致动器或液压致动器,并且取决于可移动部分90是被设计成直接地相对于固定部分88上下移动还是枢转/旋转进入和离开固定部分88,该致动器68a可以是线性的或旋转的。如果致动器68a是电动机或机电致动器,则其电流和电压由控制器70a直接地控制。如果致动器68a是气动或液压致动器,则控制器70a控制电动阀的打开和关闭,以调节致动器68a中的空气或流体。
34.控制器70a可被配置成响应于许多不同输入来致动致动器68a,以伸出或缩回灯86的可移动部分90。如上所述,那些输入中的一个可以是经由串行总线(一个或多个)40和/或58的来自传感器74、76、78、80中的一个的信息。例如,导航传感器74可将一天中的时间的信息提供给控制器70a,该控制器70a可被配置成在黄昏临近时将可移动部分90从壳体88伸出,并且在日出后将可移动部分90缩回到固定部分88中。在其他示例中,周围光传感器被设置成与串行总线40和/或58连接,或者位于灯86上并直接地连接到控制器70a,并且控制器
70a被配置成当周围照明条件较暗时伸出可移动部分90,并且当周围光线较亮时缩回可移动部分90。在一些情况下,导航传感器74还将地理位置提供给控制器70a,该控制器70a被配置成如果海船10处于水体的中间,或者如果海船10被锚定在已知的船坞或码头的位置之外(除了要求一天中的时间介于黄昏或黎明之间或周围光线较暗以外),则伸出可移动部分90。控制器70a可响应于船只的gps位置在预定时间段内未发生变化来确定海船10被锚定。在一些示例中,甚至可能不需要将海船10“开启”,以使可移动部分90从壳体88伸出并开启,并且控制器70a可被配置成“唤醒(wake)”系统38,并且当黄昏临近或在暗周围光线下时,响应于海船10的静止时间超过预定时间段来伸出并打开灯86的可移动部分90。这可帮助船东自动遵守照明规则,甚至当船东不在海船10上时。
35.控制器70a可被配置成每当灯86的可移动部分90从固定部分88伸出时打开灯86(图4a),并且每当灯86的可移动部分90缩回到固定部分88中的凹口92中时关闭灯86(图4b)。
36.同样如图4a和图4b中所示,灯86包括在灯86的可移动部分90和致动器68a之间的脱离式接头94。脱离式接头94可以是铰链,当超过给定阈值的力横向地施加到可移动部分90时,该铰链允许灯86的可移动部分90相对于固定部分88枢转。在另一个示例中,脱离式接头94可以是在可移动部分90和致动器68a的输出轴67之间的设备的一部分,该部分比可移动部分90和输出轴67更易碎,使得更易碎的脱离式接头94将代替不太易碎的输出轴67断裂。在又一示例中,脱离式接头94可以是球窝式接头,其中连接到可移动部分90的球或承窝中的一个比连接到致动器68a的输出轴67的球或承窝中的另一个更可弯曲或可断裂。在所有情况下,脱离式接头94被配置成使得如果灯86的可移动部分90受到如由脱离式接头94的设计所指示的高于预定阈值的力的冲击,则可移动部分90将枢转或者部分地或完全地脱离灯86的固定部分(诸如固定部分88和致动器68a)。因此,如果可移动部分90受到冲击,则灯86的可能更昂贵且更难以替换的各部分将保持未受损。然后,可将新的可移动部分90安装在致动器68a的输出轴67上。
37.触敏检测器96还可设置成与控制器70a通信。控制器70a可被配置成当致动器68a正在伸出灯86的可移动部分90时,响应于触敏检测器96检测到接触来控制致动器68a,以缩回灯86的可移动部分90。例如,触敏检测器96可包括可压缩的层状体,其具有连接到每个相应层的导电体。当主体未被压缩时,其各层(且因此导电体)不接触,并且致动器68a响应于来自导航传感器74或周围光传感器的信息而根据来自控制器70a的输入,将灯86的可移动部分90从固定部分88伸出。然而,如果外部物体接触一层,则该层和其上的导电体朝向另一层上的导电体压缩。响应于由此产生的输入到控制器70a的电流变化,控制器70a控制致动器68a停止伸出可移动部分90,并且反转方向以缩回可移动部分90。以这种方式,如果存在障碍物,则可移动部分90将不会完全地伸出,从而保护灯86免受损坏,并且如果与人接触,则保护人免受伤害。可使用其他已知的触敏传感器(诸如车辆自动窗上的那些),包括“非接触”电容传感器,该电容传感器具有由非导电层分隔的分层或同轴导电元件。
38.图5a和图5b示出了另一个示例,其中外围设备66a是防滑板186。防滑板186具有可移动部分190,该可移动部分190从固定部分188中的凹口192伸出和缩回,该固定部分188被配置成安装在海船10的船舷36中。致动器168a通过脱离式接头194耦合到可移动部分190。注意,脱离式接头194在防滑板186中特别有用,因为如果在防滑板186仍然通过绳索附接到
系泊处(mooring)的同时,海船10从系泊处加速离开,则绳索将防滑板186的可移动部分190从其固定部分188拉开,而不是将整个设备从船舷36拉出。触敏检测器196位于可移动部分190的顶端处。致动器168a、脱离式接头194、可移动部分190和触敏检测器196的功能基本上均类似于图4a和图4b的灯86中的对应部件,并且将不再进行描述。
39.控制器170a被配置成响应于来自传感器的信息来起动致动器168a,以将防滑板186的可移动部分190从图5a中所示的伸出位置移动到图5b中所示的缩回位置,并且从缩回位置移动到伸出位置。在一个示例中,传感器是导航传感器74,并且控制器170a被配置成响应于导航传感器74感测到海船10处于码头或船坞的地理位置来起动致动器168a,以伸出防滑板186的可移动部分190。例如,如果海船的当前地理位置是在船坞/码头的已知地理位置的阈值距离内或在给定的地理围栏区域内,则控制器170a可起动致动器168a,以升高防滑板168,其中给定的地理围栏区域可被存储在控制器170a中、mfd中或连接到串行总线40或58的图表绘图仪中。控制器170a还可要求导航传感器74先前报告海船10在到达船坞/码头的地理区域之前处于开阔水域中,和/或海船10在起动致动器168a以伸出防滑板186的可移动部分190之前在超过预定时间段(例如,两分钟)的时间内已经在船坞/码头的区域内。在另一个示例中,传感器是船速传感器80,并且控制器170a被配置成响应于船速传感器80感测到海船10的速度高于预定阈值速度来起动致动器168a,以将防滑板186的可移动部分190缩回到固定部分188中的凹口192中(参考图5b)。例如,阈值速度可以是10mph。当海船10正在以此类速度运行时,假定操作员不意在将海船10立即停靠,并且因此不需要防滑板186。
40.在一些示例中,防滑板186包括灯198。在该示例中,灯198被示出在防滑板186的可移动部分190的下侧上,以在划船者将缠绕绳索的区域中提供光;然而,灯可设置在可移动部分190的顶部上、在可移动部分190的顶部和底部上或在其侧面上。控制器170a可被配置成每当防滑板186的可移动部分190从固定部分188伸出时打开灯198(图5a),并且每当防滑板186的可移动部分190缩回到固定部分188中的凹口192中时关闭灯198(图5b)。在其他示例中,控制器170a可使用来自导航传感器74的一天中的时间的信息或来自周围光传感器的周围光读数来确定灯198应该是打开还是关闭,从而假设当做出此类确定时,防滑板186的可移动部分190从固定部分188伸出。在其他示例中,控制器170a可被配置成根据如由导航传感器74确定的海船10的地理位置来改变灯198的颜色,或者打开或关闭灯198中的一个或多个灯/光引擎。例如,如果海船10处于开阔水域中,则控制器170a可被配置成将灯198控制为除了红色或绿色以外的任何颜色,用于导航指示。当海船10处于码头或船坞的地理位置时,控制器170a可被配置成将灯198控制为包括红色或绿色的任何颜色。类似于现有的带灯的杯托,这可为海船10上的人提供视觉上的兴趣。
41.图6a和图6b示出了一个示例,其中外围设备66a是天线、桅灯或全方位灯286,它们是通常安装在硬顶14或其他高架表面(吊桥、船顶等)上的外围设备。天线/灯286包括可移动部分,其由伸缩式可移动部分290a、290b和290c构成。在其中外围设备是天线的示例中,可移动部分290a
‑
c是天线本身。尽管此处未示出细节,但是如果外围设备是全方位灯,则可移动部分290a
‑
c是支撑杆,并且灯可安装在最上部的可移动部分290a的顶部处。致动器268a通过脱离式接头294耦合到可移动部分290a
‑
c。致动器268a可以是上面相对于图4a和图4b在此所述的致动器中的任何一种。然而,在该示例中,致动器268a可特别是伸缩式线性致动器,诸如刚性带或链致动器。在最上部的可移动部分290a的顶部处的脱离式接头294和
触敏检测器296的功能基本上类似于本文上面描述的对应部分,并且将不再进行描述。
42.控制器270a被配置成响应于来自传感器的信息来起动致动器268a,以将天线/灯286的伸缩式可移动部分290a
‑
c从伸出位置(图6a)移动到缩回位置(图6b),并且从缩回位置移动到伸出位置。在一个示例中,传感器是接近传感器76,并且控制器270a被配置成响应于接近传感器76感测到海船10的前方和上方的障碍物来起动致动器268a,以缩回天线/灯286的可移动部分290a
‑
c。在另一个示例中,传感器是图像传感器78,并且控制器270a被配置成响应于图像传感器78感测到海船10的前方和上方的障碍物来起动致动器268a,以缩回天线/灯286的可移动部分290a
‑
c。在又一个示例中,传感器是导航传感器74,并且控制器270a被配置成响应于导航传感器74感测到海船10处于低架空障碍物的地理位置(如由例如地理围栏所指示)来起动致动器268a,以缩回天线/灯286的可移动部分290a
‑
c,这些地理位置可被存储在控制器170a中、mfd中或连接到串行总线40或58的图表绘图仪中。因此,天线/灯286可在海船10在高架障碍物下方经过之前降低,否则可由于其在海船10的硬顶14或其他升高表面上的高度和位置而接触和损坏天线/灯286。值得注意的是,一些vhf天线可高达18英尺,尽管如果在海船10的升高部分上,则甚至更典型的8英尺天线容易受到损坏。
43.注意,尽管图6b中的示例示出了可移动部分290a和290b缩回到天线/灯286的部分290c中,但是在另一个示例中,部分290c也可缩回到天线/灯286的固定部分288中的凹口292中,该凹口292可安装在海船10的硬顶14或其他表面上或之中。
44.图7a和图7b示出了另一个示例,其中外围设备66a是天线或灯386。然而,在该示例中,天线/灯386通过相对于其固定部分388枢转其可移动部分390而可缩回。如果外围设备是天线,则可移动部分390可以是天线本身。如果外围设备是全方位灯,则可移动部分390可以是其上安装有灯的杆。触敏检测器396、脱离式接头394、致动器368a和控制器370a的功能均基本上与相对于其对应部分在上下文描述的功能相同,尽管致动器368a可特别地是适合于提供所提及的枢转运动的旋转致动器。相对于控制器370a响应于来自海船10上的传感器74、76、78的信息而采取的行动,控制器370a可被配置成与图6a和图6b的控制器270a相同。
45.在又一个示例中,外围设备是摄像头20。摄像头20可以是在如图4a和图4b中所示的固定部分88中的凹口92内部可缩回的,或者可位于分别如图6a、图6b和图7a、图7b中所示的杆状可移动部分290a、390的顶部上。在此类实施例中,传感器可以是导航传感器74(诸如gps接收器24)。当导航传感器74感测到海船10处于码头或船坞的地理位置时,摄像头20可从凹口92伸出并打开,并且然后用作自动对接策略或类似自动化或部分自动化操纵策略的一部分。摄像头20可响应于导航传感器74确定海船10不再靠近码头而被自动地关闭和缩回。类似地,当外围设备是摄像头20时,传感器可以是在操纵杆内部的传感器。响应于操纵杆的致动,摄像头20可从凹口92伸出并打开,并且然后用作半自动化操纵策略的一部分,该策略防止海船10与其他船或码头相撞。摄像头20可响应于传感器确定操纵杆在预定时间段内尚未被操纵而被自动地关闭和缩回。
46.注意,图1中所示的摄像头20、图4a和图4b中所示的灯86、图5a和图5b中所示的防滑板186以及图6a
‑
7b中所示的灯或天线286、386均包括控制器。在一些示例中,每个控制器70a、170a、270a、370a被配置成通过经由串行总线的信号通信,控制相同类型的附加外围设备的可移动部分。再次参考图2,摄像头20、灯86、防滑板186和天线/灯286、386中的每一个中的控制器可充当主控制器,该主控制器经由串行总线62控制相同类型的其他外围设备。
也就是说,如果图4a和图4b的灯86中的控制器70a基于上面提到的标准中的任何一个(例如,周围照明条件)确定灯86的可移动部分90应该伸出并打开,则控制器70a可命令其他外围设备66b、66c中(即在其他灯中)的致动器68b、68c也伸出并打开。图5a和图5b的防滑板186也是如此,其可具有控制许多其他防滑板中的致动器的主控制器170a,以及图6a和图6b或图7a和图7b的天线或灯286、386,其可具有分别控制许多其他天线或灯中的致动器的主控制器270a、370a。在其他示例中,海船10上的每个摄像头、灯、防滑板或天线设置有其自身的控制器70a,该控制器70a响应于经由串行总线40和/或58向其提供的信息来起动致动器68a。
47.在其他示例中,摄像头20、灯86、灯286、灯386、防滑板186以及天线286、天线386可响应于操作员输入而可伸出和可缩回。例如,操作员可利用mfd或键盘51、遥控器、智能设备上的应用或其他输入设备,其可耦合到串行总线40、58中的一个,或者其可与控制器70a无线地通信。控制器70a可被配置成响应于此类操作员输入来起动致动器68a,以伸出或缩回外围设备的可移动部分。
48.在其他示例中,摄像头20、灯86、灯286、灯386、防滑板186以及天线286、天线386可响应于经由tcm 42检索的来自云44的信息而可伸出和可缩回。例如,可使用用于地理区域的天气数据来确定是否应该伸出并打开灯。可使用关于具有低架空障碍物的区域的来自其他划船者的众包(crowd
‑
sourced)信息来创建地理围栏,在该围栏中需要缩回天线或灯来避免对其造成损坏。此外,划船者可能能够使用mfd或键盘51或“智能”设备应用来输入这种类型的数据,用于由其他划船者检索和使用。例如,用户可选择标记低架空障碍物的位置,用于由控制天线或全方位灯的控制器进行稍后检索,或者用户可选择标记私人船坞的位置,用于由控制防滑板的控制器进行稍后检索。这些位置可被存储在控制器的存储系统中、云44中或mfd的存储器中。
49.在以上示例中的每一个中,控制器70a、170a、270a、370a可要求在起动致动器68a、168a、268a、368a以伸出外围设备66a的可移动部分之前,缩回外围设备66a。类似地,控制器70a、170a、270a、370a可要求在起动致动器68a、168a、268a、368a以缩回外围设备66a的可移动部分之前,伸出外围设备66a。例如,控制器70a、170a、270a、370a可将其先前的致动方向存储在其存储系统中,或者可被编程为读取其中的开关的状态。在其他示例中,控制器70a、170a、270a、370a将响应于来自上述传感器的信息、响应于来自云44的信息和/或响应于操作员输入而不管外围设备的伸出或缩回状态来起动致动器68a、168a、268a、368a,以伸出或缩回可移动部分90、190、290、390,在这种情况下,使用限位开关来防止致动器68a、168a、268a、368a在一个方向或另一个方向上进一步移动。
50.因此,本公开设想了一种用于海船的外围设备66a(诸如摄像头20、灯86、灯286、灯386、防滑板186或天线286、天线386),该外围设备66a包括可移动部分90、190、290a
‑
c、390,所述可移动部分被配置成远离其固定部分88、188、288、388伸出或从其固定部分88、188、288、388伸出,并且朝向固定部分88、188、288、388缩回或缩回到固定部分88、188、288、388中。外围设备包括致动器68a、168a、268a、368a,所述致动器被配置成伸出和缩回可移动部分90、190、290a
‑
c、390。外围设备包括控制器70a、170a、270a、370a,所述控制器可操作地连接到致动器68a、168a、268a、368a,并且被配置成响应于来自传感器(诸如导航传感器74、接近传感器76、图像传感器78、船速传感器80或周围光传感器)的信息;响应于来自云44的信
息;和/或响应于操作员输入而起动致动器68a、168a、268a、368a,以伸出和缩回外围设备的可移动部分90、190、290a
‑
c、390。
51.现在参考图3,控制器70a、170a、270a、370a包括用于经由串行总线40和/或58从传感器74、76、78、80接收信息的至少一个收发器。例如,同样简要地参考图2,控制器70a、170a、270a、370a具有总线接口402,该总线接口402是用于与can串行总线58通信的can收发器。如果控制器70a、170a、270a、370a充当主控制器以控制相同类型的其他外围设备66b、66c中的致动器68b、68c,则控制器70a、170a、270a、370a还包括第二总线接口404,该第二总线接口404是用于与lin串行总线62通信的lin收发器。
52.控制器70a、170a、270a、370a还包括处理系统406和存储系统408。处理系统406包括一个或多个处理器,每个处理器可以是微处理器、通用中央处理单元、专用处理器、微控制器或任何其他类型的基于逻辑的设备。处理系统406还可包括从存储系统408检索和执行软件的电路。处理系统406可用单个处理设备来实施,但是也可被分布在协作执行程序指令的多个处理设备或子系统上。存储系统408可包括可由处理系统406读取并能够存储软件的任何存储介质或一组存储介质。存储系统408可包括以用于存储信息(诸如计算机可读指令、包括此类指令的程序模块、数据结构等)的任何方法或技术实施的易失性和非易失性、可移动和不可移动的介质。存储系统408可作为单个存储设备实现,但是也可在多个存储设备或子系统上实施。存储介质的示例包括随机存取存储器、只读存储器、光盘、闪存、虚拟存储器和非虚拟存储器,或者可用于存储所需信息并可由指令执行系统访问的任何其他介质,以及其变型的任何组合。存储介质可与处理系统406一起被局部地容纳,或者可被分布,诸如分布在一个或多个网络服务器上,诸如在云计算应用程序和系统中。在一些实施方式中,存储介质是非暂时性存储介质。在一些实施方式中,存储介质的至少一部分可以是暂时性的。
53.控制器70a、170a、270a、370a还包括输入/输出接口410,该输入/输出接口410与处理系统406之间来回传递信息和命令。响应于处理系统406执行存储在设备移动模块412中的指令,处理系统406经由i/o接口410将命令中继到致动器68a、168a、268a、368a,所述致动器控制可移动部分90、190、290a
‑
c、390相对于固定部分88、188、288、388的移动。其他输入和/或输出设备也可连接到i/o接口410,并且本文示出和论述的示例不是限制性的。控制器70a、170a、270a、370a还包括上述收发器/总线接口402,控制器70a、170a、270a、370a通过该收发器/总线接口402与总线58进行信号通信,控制器70a、170a、270a、370a通过该收发器/总线接口402可提供有来自传感器74、76、78、80和连接到串行总线(一个或多个)40或58的任何操作员输入设备的信息。
54.设备移动模块412是一组软件指令,该组软件指令是可执行的,以相对于固定部分88、188、288、388移动可移动部分90、190、290a
‑
c、390。设备移动模块412可以是一组软件指令,该组软件指令被存储在存储系统408内并可由处理系统406执行,以如本文所述运行,以便如上所述,响应于信息(诸如一天中的时间、周围光线、地理位置、高架障碍物和/或船速)来移动可移动部分90、190、290a
‑
c、390。如相对于图2所述,可从海船10上的各种传感器74、76、78、80确定信息,所述传感器可经由串行总线(一个或多个)40和/或58和总线接口402与控制器70a、170a、270a、370a通信。在另一个示例中,控制器70a、170a、270a、370a包括能够双向无线通信的无线收发器(未示出),并且传感器和设备与控制器70a、170a、270a、370a无
线地通信。可用于此目的的示例性无线协议包括但不限于低功耗蓝牙(bluetooth low energy)(ble)、ant和zigbee。
55.本领域普通技术人员知道,来自导航传感器和船速传感器的信息通常已经在许多海船上很容易获得,并且此类传感器已经连接到主要的nmea主干,以便向mfd和发动机/电动机控制单元提供信息。此外,越来越多的海船配备有接近传感器和/或摄像头,它们也连接到主要的nmea主干并提供用于操纵海船10的信息,包括根据自治或半自治对接算法。因此,可使用此类现有的传感器来向海船10上的上述外围设备提供信息,以便增强其功能,确保船符合当地法规,且/或增强船本身的美观性。外围设备本身不需要传感器来获取此类信息,从而降低了制造复杂性和消费者的成本。同时,通过使用具有主控制器的一个外围设备来控制相同类型的其他外围设备中的致动器,可实现复杂性和成本的进一步降低。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。