技术特征:
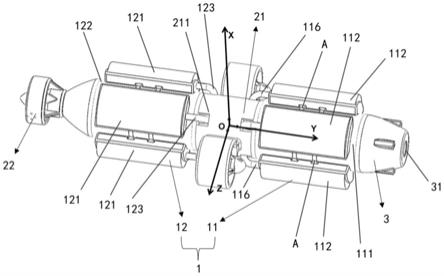
1.一种基于变体积辅助驱动的水下机器人,其特征在于,包括:变体积辅助驱动模块,包括第一变体积筒仓、至少两个第一变体积单元以及至少两个第一气囊,所述第一气囊固定于所述第一变体积筒仓外侧,所述第一变体积筒仓具有第一容纳空间,所述第一容纳空间具有至少两个第一容纳子空间,每一所述第一变体积单元包括第一微型推杆电机、第一推杆、第一推板以及第一导气管,所述第一微型推杆电机、所述第一推杆以及所述第一推板收容于第一容纳子空间,所述第一推杆与所述第一推板固定,一所述第一导气管对应连通一个所述第一容纳子空间以及一个所述第一气囊;主控系统,与所述第一微型推杆电机电性连接,控制所述第一微型推杆电机驱动所述第一推杆以带动所述第一推板进行伸缩运动并通过所述第一导气管对所述第一气囊的体积进行调整。2.根据权利要求1所述基于变体积辅助驱动的水下机器人,其特征在于:所述基于变体积辅助驱动的水下机器人包括四个所述第一气囊以及四个所述第一变体积单元,所述第一容纳空间具有四个第一容纳子空间,每一所述第一容纳子空间收容一所述第一变体积单元,所述第一容纳子空间之间通过隔板分隔,四个所述第一气囊环绕所述第一变体积筒仓外侧设置,所述第一气囊之间通过固定骨骼固定。3.根据权利要求2所述基于变体积辅助驱动的水下机器人,其特征在于:所述第一变体积筒仓包括主体、第一封盖以及第二封盖;所述主体包括所述第一容纳空间,所述第一封盖固定于所述主体的一端,所述第二封盖固定于所述主体的另一端,所述第一封盖设置有若干个第一通孔,所述第一封盖以及所述第二封盖均设置有嵌入槽口,所述第一通孔与所述第一导气管对应设置,所述隔板设置于所述嵌入槽口以独立分隔每一所述第一容纳子空间。4.根据权利要求1
‑
3任一项所述基于变体积辅助驱动的水下机器人,其特征在于:所述第一推板为密封橡胶推板,当所述第一推板伸长至最大距离所述第一容纳子空间以及所述第一气囊封闭。5.根据权利要求1所述基于变体积辅助驱动的水下机器人,其特征在于:所述基于变体积辅助驱动的水下机器人还包括推进模块,所述推进模块包括转向旋翼模块,所述转向旋翼模块包括转向旋翼固定框架、第一转向旋翼以及第二转向旋翼,所述转向旋翼固定框架与所述变体积辅助驱动模块固定,所述转向旋翼固定框架包括至少一槽孔,所述槽孔供所述第一导气管通过,所述第一转向旋翼以及所述第二转向旋翼对称设置于所述转向旋翼固定框架的左右两侧;所述第一转向旋翼以及所述第二转向旋翼与所述主控系统连接。6.根据权利要求5所述基于变体积辅助驱动的水下机器人,其特征在于:所述基于变体积辅助驱动的水下机器人还包括头部视觉系统,所述推进模块还包括尾部推进器,所述头部视觉系统设置于所述变体积辅助驱动模块的前侧,所述尾部推进器设置于所述变体积辅助驱动模块的后侧,所述头部视觉系统包括摄像头、探照灯模块以及传感器模块,所述摄像头、所述探照灯模块以及所述传感器模块与所述主控系统连接;所述主控系统用于根据基于变体积辅助驱动的水下机器人在水中深度控制所述探照灯模块的亮度,以及根据所述摄像头以及所述传感器模块获取的环境数据,调整所述第一气囊的体积以进行姿态调整。7.一种控制方法,其特征在于,应用于如权利要求1
‑
6任一项所述基于变体积辅助驱动的水下机器人,包括:
获取实时数据;所述实时数据包括环境数据和/或气压数据,所述气压数据包括每一第一气囊的气压值;主控系统根据所述实时数据对第一微型推杆电机以及推进模块进行控制。8.根据权利要求7所述控制方法,其特征在于:所述根据所述实时数据对第一微型推杆电机以及推进模块进行控制,包括:当其中一第一气囊的气压值变化异常,控制该第一气囊对应的第一微型推杆电机进行控制以使第一推板伸长至最大距离,封闭该第一气囊以及该第一气囊对应的第一容纳子空间,对其余的第一气囊的体积进行调整以使水下机器人朝向水面,并控制推进模块全速运转;或者,当所述环境数据包括接近水下机器人的目标对象,控制推进模块减速运转,并控制第一微型推杆电机对第一气囊的体积进行调整,当水下机器人调整至朝向空旷区域,控制推进模块加速运转。9.根据权利要求7所述控制方法,其特征在于:所述环境数据包括目标图像数据,所述控制方法还包括:当水中深度出现变化,对探照灯模块的亮度进行调整;所述亮度的大小与所述水中深度呈正比;在亮度调整后获取原始图像数据,对所述原始图像数据进行上色以及去雾处理,得到目标图像数据。10.根据权利要求7所述控制方法,其特征在于:所述根据所述实时数据对第一微型推杆电机进行控制,包括:将所述环境数据输入深度确定性策略梯度模型,确定水下机器人的最优姿态;对第一微型推杆电机进行控制以使水下机器人调整为最优姿态。
技术总结
本发明公开了一种基于变体积辅助驱动的水下机器人及控制方法,本发明通过设置变体积辅助驱动模块以及主控系统,变体积辅助驱动模块包括第一变体积筒仓、至少两个第一变体积单元以及至少两个第一气囊,第一变体积筒仓具有第一容纳空间,第一容纳空间具有至少两个第一容纳子空间,每一第一变体积单元包括第一微型推杆电机、第一推杆、第一推板以及第一导气管,第一微型推杆电机、第一推杆以及第一推板收容于第一容纳子空间,第一推杆与第一推板固定,一第一导气管对应连通一个第一容纳子空间以及一个第一气囊;通过第一气囊的体积变化即可以为水下机器人提供浮力,降低了控制水下机器人沉浮的能量消耗,本发明可广泛应用于机器人领域。领域。领域。
技术研发人员:刘爱荣 梁家乔 陈俊达 傅继阳 陈炳聪 谢文高 张怡孝
受保护的技术使用者:广州大学
技术研发日:2021.09.24
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。