1.本发明涉及消防用机器人领域,具体的说是一种消防灭火机器人。
背景技术:
2.传统的消防灭火机器人在灭火时喷射头只是在纵向高度和单侧方向上进行移动喷射灭火,占用空间大,不能进行 360
°
旋转式工作,灵活度不够,特别是在缺乏水源的地区,更是难以灭火,灭火效果一般,适应性不强。
技术实现要素:
3.针对现有技术的不足,本发明的目的在于提供一种能够在有限的空间范围内提高灭火效率,能根据火情来装填不同的灭火剂,可以达到更好的灭火效果。同时在没有水源的地方,也可以灭火的消防灭火机器人。
4.为了实现上述目的,本发明采用如下技术方案;一种消防灭火机器人,包括行走装置和车体,所述行走装置上在安装有车体,所述车体上装有第一旋转装置,所述车体上装有灭火剂储存罐,所述车体上装有水泵装置,所述车体上装有电源装置,所述车体上装有加压装置,所述车体上设置有摄像头。
5.进一步的,所述支架一上连接有连接管,所述支架一上安装有第二旋转装置,所述连接管上连接有水源连接管二,所述连接管上连接有支架二,所述支架二上安装有有第二旋转装置,所述水源连接管二上连接有水源喷射头,所述水源喷射头上连接有支架三,所述支架三上安装有第二旋转装置,所述支架三和所述支架二之间连接有动臂。
6.进一步的,所述第三旋转装置上连接有支臂一,所述支臂一上连接有支臂二,所述支臂二上安装有动力装置,所述动力装置上连接有切割装置。
7.进一步的,所述水泵装置上安装安装有水源接头。
8.进一步的,所述灭火剂储存罐上安装有遥控阀门,所述遥控阀门上安装有灭火剂输送管,所述灭火剂输送管上安装有灭火剂喷射头。
9.进一步的,所述电源装置为所述第一旋转装置、所述第二旋转装置、所述水泵装置、所述加压泵、所述遥控阀门以及所述摄像头提供能源。
10.进一步的,所述第一旋转装置的最大旋转角度为360
°
,所述第二旋转装置的最大旋转角度为90
°
。
11.进一步的,所述加压装置与所述水泵的连接方式为法兰连接。
12.进一步的,所述遥控阀门为电动遥控球阀。
13.本发明的有益效果是:本发明通过在车体上设置有第一旋转装置和第二旋转装置,第一旋转装置使得灭火装置能够360
°
旋转,第二旋转装置使得灭火装置能够改变高度和改变喷射角度。通过第一旋转装置和第二旋转装置之间的灵活组合,使得消防机器人能够在有限的空间范围内提高灭火效率,同时根据火情来装填不同的灭火剂,可以达到更好的灭火效果。同时在没有水
源的地方,也可以灭火,提高了该灭火机器人的适用性。此外,安装有可以灵活运动的带锯片切割装置,可以根据情况来切除前方的障碍物,方便避开障碍物前进。
附图说明
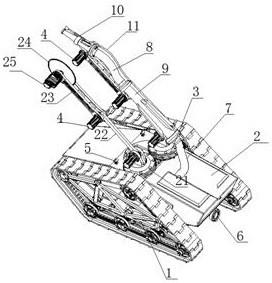
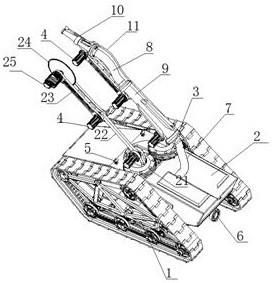
14.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍:图1为本发明立体结构示意图;图2为本发明第一局部示意图;图3为本发明第二局部示意图;图4为本发明第三局部示意图;附图标号为:1
‑
行走装置、2
‑
车体、3
‑
第一旋转装置、4
‑
第二旋转装置、5
‑
摄像头、6
‑
水源接头、7
‑
水源连接管一、8
‑
水源连接管二、9
‑
连接管、10
‑
水源喷射头、11
‑
灭火剂输送管、12
‑
灭火剂喷射头、13
‑
灭火剂储存罐、14
‑
水泵装置、15
‑
电源装置、16
‑
1支架一、16
‑
2支架二、16
‑
3支架三、17
‑
加压泵、18
‑
遥控阀门、19
‑
灭火剂输送管、20
‑
动臂、21
‑
第三旋转装置、22
‑
支臂一、23
‑
支臂二、24
‑
切割装置、25
‑
动力装置。
具体实施方式
15.下面参照附图说明本发明的具体实施方式。
16.参阅附图1—图4所示:一种消防灭火机器人,包括行走装置1、车体2,行走装置1上安装有车体2,车体2上装有第一旋转装置3,车体2上装有灭火剂储存罐13,灭火剂储存罐13可以根据火情来装填不同的灭火剂,可以达到更好的灭火效果。
17.车体2上装有水泵装置14,车体2上装有电源装置15,车体2上装有加压装置17,车体2上设置有摄像头5,摄像头5能用于观察火场周围环境。
18.第一旋转装置3上连接有支架一16
‑
1,支架一16
‑
1上连接有连接管9,支架一16
‑
1上安装有第二旋转装置4,连接管9上连接有水源连接管二8,连接管9上连接有支架二16
‑
2,支架二上16
‑
2安装有有第二旋转装置4,水源连接管二8上连接有水源喷射头10,水源喷射头10上连接有支架三16
‑
3,支架三16
‑
3上安装有第二旋转装置4,支架三16
‑
3和支架二16
‑
2之间连接有动臂20。
19.第一旋转装置3的最大旋转角度为360
°
,第二旋转装置4的最大旋转角度为90
°
,通过第一旋转装置3和第二旋转装置4之间的灵活组合,使得消防机器人能够在有限的空间范围内提高灭火效率。
20.第三旋转装置21上连接有支臂一22,支臂一22上连接有支臂二23,所支臂二23上安装有动力装置25,动力装置25上连接有切割装置24。
21.水泵装置14上安装有水源接头6。
22.灭火剂储存罐13上安装有遥控阀门18,,遥控阀门18可以采用电动遥控球阀,遥控阀门18上安装有灭火剂输送管11,通过遥控阀门18来控制灭火剂的流动,灭火剂输送管11上安装有灭火剂喷射头12。
23.电源装置15为第一旋转装置3、第二旋转装置4、水泵装置14、加压装置17以及摄像
头5提供能源。
24.加压装置17与水泵装置14的连接方式可以采用法兰连接。
25.上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
技术特征:
1.一种消防灭火机器人,包括行走装置和车体,其特征在于:所述行走装置上在安装有车体,所述车体上装有第一旋转装置,所述车体上装有灭火剂储存罐,所述车体上装有水泵装置,所述车体上装有电源装置,所述车体上装有加压装置,所述车体上设置有摄像头。2.根据权利要求1所述的一种消防灭火机器人,其特征在于:所述第一旋转装置上连接有支架一,所述支架一上连接有连接管,所述支架一上安装有第二旋转装置,所述连接管上连接有水源连接管二,所述连接管上连接有支架二,所述支架二上安装有有第二旋转装置,所述水源连接管二上连接有水源喷射头,所述水源喷射头上连接有支架三,所述支架三上安装有第二旋转装置,所述支架三和所述支架二之间连接有动臂。3.根据权利要求1所述的一种消防灭火机器人,其特征在于:所述第三旋转装置上连接有支臂一,所述支臂一上连接有支臂二,所述支臂二上安装有动力装置,所述动力装置上连接有切割装置。4.根据权利要求1所述的一种消防灭火机器人,其特征在于:所述水泵装置上安装安装有水源接头。5.根据权利要求1所述的一种消防灭火机器人,其特征在于:所述灭火剂储存罐上安装有遥控阀门,所述遥控阀门上安装有灭火剂输送管,所述灭火剂输送管上安装有灭火剂喷射头。6.根据权利要求1所述的一种消防灭火机器人,其特征在于:所述电源装置为所述第一旋转装置、所述第二旋转装置、所述水泵装置、所述加压泵、所述遥控阀门以及所述摄像头提供能源。7.根据权利要求1所述的一种消防灭火机器人,其特征在于:所述第一旋转装置的最大旋转角度为360
°
,所述第二旋转装置的最大旋转角度为90
°
。8.根据权利要求1所述的一种消防灭火机器人,其特征在于:所述加压装置与所述水泵的连接方式为法兰连接。9.根据权利要求5所述的一种消防灭火机器人,其特征在于:所述遥控阀门为电动遥控球阀。
技术总结
本发明公开了一种消防灭火机器人,该灭火机器人设置有车体,车体上设置有第一旋转装置和第二旋转装置,第一旋转装置使得灭火装置能够360
技术研发人员:张盖旭 孙永剑 朱立勇
受保护的技术使用者:浙江理工大学
技术研发日:2021.10.12
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。