1.本发明一种设备位置图像识别系统,属于每层掘进技术领域。
背景技术:
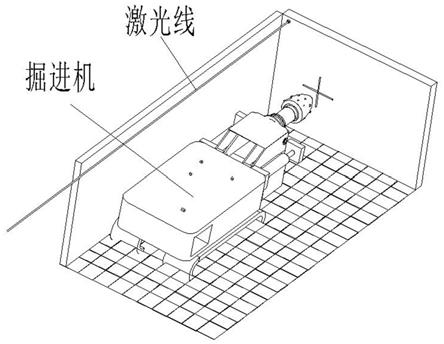
2.为使掘进机在矿井内行进时,能够按照理想路线,在限定区域内进行采煤,需对其行进方向进行引导。针对现有技术的不足,我们提供了一种确定标准线与掘进机工作点之间的坐标关系的方法,并研发了一款能实时显示坐标的装置,具备时刻精准测距的优点,实现掘进机航向精确对准。
技术实现要素:
3.本发明克服了现有技术存在的不足,提供了一种设备位置图像识别系统,能实时显示坐标的装置,具备时刻精准测距的优点,实现掘进机航向精确对准。
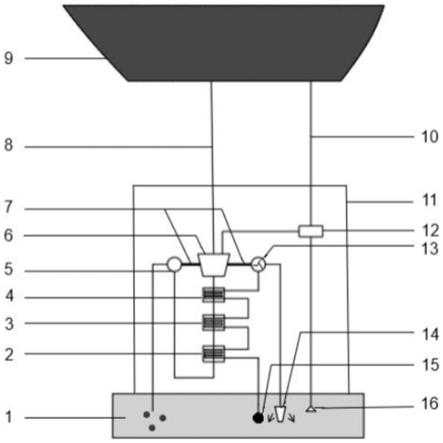
4.为了解决上述技术问题,本发明采用的技术方案为:设备位置图像识别系统,设巷道内的激光发射点为n,激光线沿巷道照射到采煤层的激光点为o,将激光线no作为标准线,指引掘进机行进方向,且将激光点o作为坐标原点,掘进机钻头在采煤层上掘进的点设为坐标x,建立激光点o与掘进机钻头x之间的实时坐标关系,就能根据坐标关系判断掘进机钻头是否在采煤层工作区域内进行作业,若掘进机出现偏移,掘进机钻头也会随之偏移,激光点o与掘进机钻头x之间的实时坐标关系出现变化,通过计算机对掘进机钻头进行及时调整,使得激光点o与掘进机钻头x之间的实时坐标关系回到初始设定值上;在掘进机机身上表面垂直于掘进方向上的两点e、f各安装一台摄像机,分别为1#摄像机和2#摄像机,且所述e、f的连线也垂直于掘进机掘进方向,设ef两点间的直线距离为s;1#摄像机和2#摄像机能通过自身底部设置的舵机进行转动,且1#摄像机和2#摄像机的转动轴线平行于掘进机掘进方向,使得1#摄像机和2#摄像机每转动一圈镜头的中心点焦点会与激光线no进行一次重合,1#摄像机和2#摄像机的镜头的中心点焦点与激光线no重合时进行拍照,设定1#摄像机和2#摄像机拍到激光线no的位置点为y点,则e、f和y点之间的连线构成一个三角形;所述1#摄像机和2#摄像机的舵机上均设置有角度传感器,且角度传感器能实时测定1#摄像机和2#摄像机与掘进机机身上表面之间的夹角,且夹角分别为α、β,根据ef两点间的直线距离为s以及1#摄像机和2#摄像机与掘进机机身上表面之间的夹角,利用三角函数得出1#摄像机e、2#摄像机f与激光线no之间的距离ey和fy,进而得到掘进机机身距离激光线no的垂直距离h以及掘进机机身中部距离激光线no的水平距离l;根据起始位置处得到的ey和fy值,在掘进机前进过程中若ey和fy值出现变化,则掘进机出现左右偏移,具体为,若ey和fy值同时增大,则掘进机朝远离激光线no的方向偏移,若ey和fy值同时减小,则掘进机朝靠近激光线no的方向偏移。
5.在所述掘进机侧面固定安装一台摄像机,标记为3#摄像机,3#摄像机能通过自身底部设置的舵机进行转动,且3#摄像机的转动轴线平行于掘进机掘进方向,使得3#摄像机
每转动一圈镜头的中心点焦点会与激光线no重合一次,在掘进机上设置有用于采集掘进机机身水平度的角度传感器,测得的角度标记为γ,同时在3#摄像机上安装镜筒,且在镜筒前镜面中心点上设置与掘进机掘进方向平行的基准参考线pq,在3#摄像机的镜头的中心点焦点与激光线no重合时进行拍照,设定3#摄像机拍到激光线no的位置点为x点,此时在成像的照片中会有基准参考线pq与激光线no之间的夹角即为γ,若基准参考线pq与激光线no重合(γ=0),则说明掘进机沿激光线no前进,掘进机钻头无需调整继续掘进,若基准参考线pq与激光线no出现夹角γ(γ>0),则说明掘进机出现倾斜,即地面有颠簸,此时计算机根据角度传感器采集的倾斜角度γ控制掘进机钻头做出对应调整。
6.为获取激光线no的清晰图像,在1#、2#摄像机上均安装镜筒,且镜筒前镜面上均设置瞄准点,以使1#、2#摄像机能精确瞄准激光线no,确保获取清晰图像。
7.所述激光线no沿巷道走向设置,或为水平线,或为斜线。
8.本发明与现有技术相比具有的有益效果是:本发明采用一条激光线作为标准线,指引掘进机行进方向,当掘进机在矿井内作业时,可以确定激光在采煤层投射点与掘进机钻头之间的实时坐标关系,根据坐标关系可判断掘进机钻头是否在工作区域内进行作业,如发生偏移则及时进行调整。
附图说明
9.图1为本发明的结构示意图。
10.图2为本发明中顶面摄像机获取的三角关系示意图。
11.图3为本发明中侧面摄像机获取的示意图。
具体实施方式
12.如图1、图2和图3所示,本发明设备位置图像识别系统,设巷道内的激光发射点为n,激光线沿巷道照射到采煤层的激光点为o,将激光线no作为标准线,指引掘进机行进方向,且将激光点o作为坐标原点,掘进机钻头在采煤层上掘进的点设为坐标x,建立激光点o与掘进机钻头x之间的实时坐标关系,就能根据坐标关系判断掘进机钻头是否在采煤层工作区域内进行作业,若掘进机出现偏移,掘进机钻头也会随之偏移,激光点o与掘进机钻头x之间的实时坐标关系出现变化,通过计算机对掘进机钻头进行及时调整,使得激光点o与掘进机钻头x之间的实时坐标关系回到初始设定值上;在掘进机机身上表面垂直于掘进方向上的两点e、f各安装一台摄像机,分别为1#摄像机和2#摄像机,且所述e、f的连线也垂直于掘进机掘进方向,设ef两点间的直线距离为s;1#摄像机和2#摄像机能通过自身底部设置的舵机进行转动,且1#摄像机和2#摄像机的转动轴线平行于掘进机掘进方向,使得1#摄像机和2#摄像机每转动一圈镜头的中心点焦点会与激光线no进行一次重合,1#摄像机和2#摄像机的镜头的中心点焦点与激光线no重合时进行拍照,设定1#摄像机和2#摄像机拍到激光线no的位置点为y点,则e、f和y点之间的连线构成一个三角形;所述1#摄像机和2#摄像机的舵机上均设置有角度传感器,且角度传感器能实时测定1#摄像机和2#摄像机与掘进机机身上表面之间的夹角,且夹角分别为α、β,根据ef两点间的直线距离为s以及1#摄像机和2#摄像机与掘进机机身上表面之间的夹角,利用三角函数
得出1#摄像机e、2#摄像机f与激光线no之间的距离ey和fy,进而得到掘进机机身距离激光线no的垂直距离h以及掘进机机身中部距离激光线no的水平距离l;根据起始位置处得到的ey和fy值,在掘进机前进过程中若ey和fy值出现变化,则掘进机出现左右偏移,具体为,若ey和fy值同时增大,则掘进机朝远离激光线no的方向偏移,若ey和fy值同时减小,则掘进机朝靠近激光线no的方向偏移。
13.在所述掘进机侧面固定安装一台摄像机,标记为3#摄像机,3#摄像机能通过自身底部设置的舵机进行转动,且3#摄像机的转动轴线平行于掘进机掘进方向,使得3#摄像机每转动一圈镜头的中心点焦点会与激光线no重合一次,在掘进机上设置有用于采集掘进机机身水平度的角度传感器,测得的角度标记为γ,同时在3#摄像机上安装镜筒,且在镜筒前镜面中心点上设置与掘进机掘进方向平行的基准参考线pq,在3#摄像机的镜头的中心点焦点与激光线no重合时进行拍照,设定3#摄像机拍到激光线no的位置点为x点,此时在成像的照片中会有基准参考线pq与激光线no之间的夹角即为γ,若基准参考线pq与激光线no重合(γ=0),则说明掘进机沿激光线no前进,掘进机钻头无需调整继续掘进,若基准参考线pq与激光线no出现夹角γ(γ>0),则说明掘进机出现倾斜,即地面有颠簸,此时计算机根据角度传感器采集的倾斜角度γ控制掘进机钻头做出对应调整。
14.为获取激光线no的清晰图像,在1#、2#摄像机上均安装镜筒,且镜筒前镜面上均设置瞄准点,以使1#、2#摄像机能精确瞄准激光线no,确保获取清晰图像。
15.所述激光线no沿巷道走向设置,或为水平线,或为斜线。
16.关于掘进机机身是否倾斜、偏离的判断:若地面平整,在设定好掘进机机身与瞄准激光线no的距离后,若掘进机直线前进,则h和l均不变。
17.若地面平整,掘进机出现偏移时,h不变,l变大或变小,变大说明掘进机向外偏移,变小则说明掘进机向内偏移。
18.若h出现变化,则说明掘进机所处地面不平整,h变大,则说明地面高于基准水平面,即地面凸起来了,反之,地面凹下去了。
19.且根据侧面3#摄像机拍的的照片结合角度传感器获得的倾斜角度γ,得到具体的倾斜值,然后通过计算机对掘进机钻头进行及时调整,使得激光点o与掘进机钻头x之间的实时坐标关系回到初始设定值上。
20.本发明通过在顶面和侧面设置的摄像机,并将摄像机捕捉到的瞄准激光线no图片反馈给计算机,通过计算机确定激光点o与掘进机钻头x之间的实时坐标关系,然后根据掘进机钻头x的实时坐标值,判断掘进机四个方向上的偏移,然后根据具体偏移值,控制掘进机钻头进行调整,确保其在既定采煤层工作区域内进行作业。
21.本发明采用一条激光线作为标准线,指引掘进机行进方向,当掘进机在矿井内作业时,可以确定激光在采煤层投射点与掘进机钻头之间的实时坐标关系,根据坐标关系可判断掘进机钻头是否在工作区域内进行作业,如发生偏移则及时进行调整。
22.上面结合实施例对本发明的实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。