检查装置
1.本技术是申请号为201711238042 .9、申请日为2017年11月30日、发明名称为“检查装置”的中国发明专利申请的分案申请。
技术领域
2.本发明涉及检查装置,前述检查装置具备检测体和使前述检测体移动的驱动部,将容纳容纳物的容纳容器作为检查对象。
背景技术:
3.该检查装置的以往例被记载于日本特开2009
‑
128338号公报(专利文献1)。在专利文献1的检查装置中,将线材盒作为检查对象的容纳容器,前述线材盒将玻璃基板作为容纳物容纳。并且,检查对象的线材盒为了将容纳的玻璃基板定位而具备多个线材。多个线材分别沿容器左右方向设置,多个线材以在容器上下方向及容器前后方向上排列的状态配置。
4.在专利文献1的检查装置中,以在容器前后方向上排列的状态具备投光部和受光部,将这样具备的投光部和受光部的组具备成用于分别检查线材的两端部的两组和用于检测线材的中央部的一组这三组。并且,由于使支承线材盒的升降台升降时的由于3组投光部及受光部而检测线材的时机的偏差,检测出线材挠曲,即检测出用于将容纳物定位的部件的歪斜。
5.但是,在容纳容器是作为专利文献1的检查装置的检查对象的线材盒的情况下,线材盒是重量物,为了使线材盒升降而使用的升降台的驱动部需要使用输出较大的驱动部,所以升降台的制造成本变高,由此,检查装置的制造成本变高。
6.此外,在容纳容器中,具备有取代多个线材而以悬臂状态支承于容器主体的多个棒状体。在这样的将多个棒状体以悬臂状态具备的容纳容器中,目前还未已知能够检测棒状体的歪斜的检查装置。
技术实现要素:
7.因此,希望实现一种检查装置,前述检查装置能够检测容纳容器具备的棒状体的歪斜,同时能够抑制制造成本。
8.鉴于上述情况,检查装置的技术特征为,前述检查装置具备检测体和使前述检测体移动的驱动部,把将容纳物容纳的容纳容器作为检查对象,其特征在于,前述容纳容器具备容器主体和多个棒状体,前述容器主体具有将前述容纳物容纳的容纳空间,前述多个棒状体被设置于前述容纳空间,将容纳于前述容纳空间的前述容纳物定位,多个前述棒状体分别被以沿着第1方向的姿势设置,并且以前述棒状体的作为一侧的端部的基端部固定于前述容器主体、作为另一侧的端部的末端部未被固定的悬臂状态被支承于前述容器主体,多个前述棒状体以分别在第2方向和第3方向上排列多个的状态配置,前述第2方向相对于前述第1方向正交,前述第3方向相对于前述第1方向及前述第2方向正交,前述驱动部使前述检测体向前述第3方向移动,前述检测体以将投光部和受光部在前述第2方向上排列的状
态具备投光部和受光部,前述投光部将在前述第3方向上具有宽度的带状的检测光向前述受光部投光,前述投光部和前述受光部以将前述容器主体载置于检查用的载置部的状态,配置于前述末端部通过前述投光部和前述受光部之间那样的前述第1方向的位置。
9.根据这些技术特征,容纳容器能够以借助多个棒状体定位的状态将容纳物容纳。并且,在这样的容纳容器中,有由于容纳的容纳物的载荷、棒状体的自重而在棒状体上发生歪斜的可能性,但能够通过借助检查装置进行检查来如下所述地检测棒状体的歪斜。
10.若将在棒状体上未发生歪斜的情况的棒状体的末端部的位置设为适当位置,则在棒状体上发生歪斜的情况下,棒状体的末端部的位置从适当位置偏离。并且,检测装置基于使检测体移动时的检测体的第3方向上的位置、带状的检测光的被棒状体隔断的位置,能够检测棒状体的末端部的第3方向上的位置,能够检测从棒状体的末端部的适当位置偏离的位置,即能够在棒状体上检测歪斜。
11.此外,借助驱动部使检测体在第3方向上移动来检测棒状体的末端部的位置,由此不需要使容纳容器移动。并且,检测体与容纳容器相比为轻量,所以与使容纳容器移动的情况相比,能够抑制检查装置的制造成本。
12.这样,能够提供一种检查装置,前述检查装置在能够检测容纳容器所具备的棒状体的歪斜的同时,能够抑制制造成本。
附图说明
13.图1是物品收纳设备的俯视图。
14.图2是物品收纳设备的侧视图。
15.图3是容纳容器的立体图。
16.图4是检查部的俯视图。
17.图5是检查部的侧视图。
18.图6是检查部的后视图。
19.图7是表示支承操作机构的图。
20.图8是表示支承操作机构的图。
21.图9是检测部的立体图。
22.图10是表示检测体的检测状态的图。
23.图11是表示检测体的检测状态的图。
24.图12是表示检测体的检测状态的图。
具体实施方式
25.1.实施方式基于附图,对在容器收纳设备上采用检查装置的实施方式进行说明。
26.如图1及图2所示,在容器收纳设备具备收纳架2和堆垛起重机3,前述收纳架2收纳容纳容器1,前述堆垛起重机3作为搬运容纳容器1的搬运装置。
27.收纳架2将收纳容纳容器1的多个收纳部4以在上下方向z及架长边方向x上排列的状态具备。此外,收纳架2具备基板出入部5、容器出入部6、检查部7,前述基板出入部5用于使板状体b相对于容纳容器1出入,前述容器出入部6用于将未容纳有板状体b的容纳容器1
(以下有称作空的容纳容器1的情况)从收纳架2取出,前述检查部7用于检查空的容纳容器1。这样,被容纳于容纳容器1的容纳物是板状体b,详细地说,是被用于液晶电视等的玻璃基板。在物品收纳设备上设置有风扇过滤器单元8,收纳架2及堆垛起重机3被设置于空气(气体)从顶棚侧向地面侧向下方流动的空间。
28.接着,对容器容纳设备进行说明,但从上下方向z观察,将沿收纳架2的方向设为架长边方向x,将相对于该架长边方向x正交的方向设为架纵深方向y来说明。此外,在架纵深方向y上,将堆垛起重机3相对于收纳架2存在的一侧设为前侧y1,将与前侧y1相反的一侧设为后侧y2来说明。
29.〔堆垛起重机〕堆垛起重机3具备行进台车11、杆12、升降台13、移载装置14,前述行进台车11在形成于收纳架2的前侧y1的行进路径上沿架长边方向x行进,前述杆12立起设置于行进台车11,前述升降台13沿杆12被在上下方向z上引导,前述移载装置14被支承于升降台13,在收纳架2和自身之间移载容纳容器1。此外,在升降台13具备旋转装置(图中未示出),前述旋转装置使移载装置14绕沿上下方向z的轴心旋转,使移载装置14旋转180
°
,由此,移载装置14在与一对收纳架2的任意一个之间都能够移载容纳容器1。并且,堆垛起重机3通过行进台车11的行进、升降台13的升降、及移载装置14的出退及旋转,在收纳部4、基板出入部5、容器出入部6、检查部7之间搬运容纳容器1。另外,被搬运至容器出入部6的容纳容器1被从收纳架2向后方y2取出,该被取出的容纳容器1被洗涤装置(图中未示出)洗涤。被洗涤装置洗涤的洗涤后的容纳容器1返回容器出入部6。
30.在容器收纳设备中,容纳有板状体b的容纳容器1被收纳至收纳部4,该容纳容器1借助堆垛起重机3,被从收纳部4向基板出入部5搬运。在基板出入部5,被容纳于容纳容器1的板状体b1借助移载机器人16以1个单位取出,被载置于搬运输送机17,并且被搬运输送机17搬运来的板状体b借助移载机器人16以1个单位容纳于容纳容器1。基板出入部5的板状体b的出入结束的容纳容器1借助堆垛起重机3,被从基板出入部5向收纳部4搬运。
31.在相对于容纳容器1需要检查的情况下,该容纳容器1被堆垛起重机3向基板出入部5搬运,板状体b被移载机器人16全部取出后,被堆垛起重机3向检查部7搬运。此外,在相对于容纳容器1需要洗涤的情况下,该容纳容器1被堆垛起重机3向基板出入部5搬运,板状体b被移载机器人16全部取出后,被堆垛起重机3向容器出入部6搬运。此外,在相对于容纳容器1需要检查和洗涤二者的情况下,该容纳容器1被堆垛起重机3向基板出入部5搬运,板状体b被移载机器人16全部取出后,被堆垛起重机3向容器出入部6搬运,洗涤后的容纳容器1被堆垛起重机3从容器出入部6向检查部7搬运。另外,在需要相对于容纳容器1的检查和洗涤二者的情况下,也可以更换向容器出入部6和检查部7搬运的顺序。
32.〔容器〕接着,对容纳容器1进行说明。另外,在容器收纳设备,容纳容器1以容器前后方向d1(第1方向)沿架纵深方向y、容器左右方向d2(第2方向)沿架长边方向x、容器上下方向d3(第3方向)沿上下方向z的姿势,进行收纳、搬运。因此,在容纳容器1位于检查部7的状态下,容器前后方向d1与架纵深方向y为相同的方向,容器左右方向d2与架长边方向x为相同的方向,容器上下方向d3与上下方向z为相同的方向。此外,容器前后方向d1的前侧和架纵深方向y的前侧y1相同,容器前后方向d1的后侧和架纵深方向y的后侧y2相同。
33.如图3~图6所示,容纳容器1具备容器主体22和支承部23,前述容器主体22具有容纳板状体b的容纳空间21,前述支承部23将容纳于容纳空间21的板状体b从下方支承。容纳容器1以将支承部23在容器上下方向d3上排列的状态具备多个支承部23。并且,对于容纳容器1,板状体b以沿着容器前后方向d1及容器左右方向d2的姿势容纳于容纳空间21。
34.容器主体22具备上框26、与该上框26相比在容器上下方向d3上位于下方的下框27、位于上框26和下框27之间而固定于上框26及下框27的中间框28。上框26、下框27及中间框28分别组合构成棒状的框材。
35.上框26由上外框26a和上内框26b构成,前述上外框26a在容器上下方向d3上观察形成为矩形,前述上内框26b在被上外框26a包围的空间以格子状具备,固定于上外框26a。下框27由下外框27a和下内框27b构成,前述下外框27a在容器上下方向d3上观察形成为矩形,前述下内框27b在被下外框27a包围的空间以格子状具备,固定于下外框27a。
36.中间框28由前框28a、右框28b、左框28c构成,前述前框28a相对于容纳空间21位于容器前后方向d1的前侧,前述右框28b相对于容纳空间21位于容器左右方向d2的右侧,前述左框28c相对于容纳空间21位于容器左右方向d2的左侧。前框28a由固定于上外框26a及下外框27a而在容器上下方向d3上延伸的一根框材构成,以在容器左右方向d2上排列的状态具备多个(在本实施方式中为3根)。右框28b及左框28c分别由在容器上下方向d3上延伸的一根框材构成,以在容器前后方向d1上排列的状态具备多个(在本实施方式中为5根)。
37.相对于容纳空间21,在容器前后方向d1的后侧不具备中间框28。由此,容纳容器1相对于容纳空间21在作为容器前后方向d1的一侧的后侧,形成有相对于容纳空间21使板状体b出入的出入口29。
38.在多个前框28a的每一个上,以在容器上下方向d3上排列的状态连结有多个(在本实施方式中为3根)第1棒状体23a,多个第1棒状体23a以在容器左右方向d2及容器上下方向d3上排列多个的状态配置。第1棒状体23a的每一个被以沿着容器前后方向d1的姿势设置,并且以作为第1棒状体23a的前侧的端部(一侧的端部)的基端部被固定于容器主体22的前框28a、作为后侧的端部(另一侧的端部)的末端部未被固定的悬臂状态被支承于容器主体22。多个第1棒状体23a的每一个形成为从基端部越向末端部侧越细的形状。多个第1棒状体23a的每一个为,其末端部位于比容器主体22的后端靠前方的位置,在容器前后方向d1上,位于和位于最后方的第2棒状体23b、第3棒状体23c相同的位置。另外,多个第1棒状体23a相当于被配置于容纳空间21来将容纳于容纳空间21的板状体b定位的棒状体。
39.在多个右框28b的每一个上,以在容器上下方向d3上排列的状态连结有多个(在本实施方式中为5根)第2棒状体23b,多个第2棒状体23b以在容器前后方向d1及容器上下方向d3上排列多个的状态配置。多个第2棒状体23b分别以沿容器左右方向d2的姿势设置,以第2棒状体23b的右侧的端部即基端部固定于容器主体22的右框28b、左侧的端部即末端部未固定的悬臂状态被支承于容器主体22。
40.在多个左框28c的每一个上,以在容器上下方向d3上排列的状态连结有多个(在本实施方式中为5根)第3棒状体23c,多个第3棒状体23c以在容器前后方向d1及容器上下方向d3排列多个的状态配置。多个第3棒状体23c的每一个以沿容器左右方向d2的姿势设置,并且以第3棒状体23c的左侧的端部即基端部固定于容器主体22的左框28c、右侧的端部即末端部未固定的悬臂状态被支承于容器主体22。
41.并且,在容纳空间21的容器左右方向d2的中央部,形成有配置多个第1棒状体23a的区域(配置区域e)。在容纳空间21的比中央部靠右侧,形成有配置多个第2棒状体23b的区域。在容纳空间21的比中央部靠左侧,形成有配置多个第3棒状体23c的区域。
42.多个支承部23的每一个由以相同高度具备的多个(在本实施方式中为3根)第1棒状体23a、多个(在本实施方式中为5根)第2棒状体23b及多个(在本实施方式中为5根)第3棒状体23c构成。这样,多个支承部23的每一个包括在容器左右方向d2上排列成一列的多个第1棒状体23a。并且,将以相同的高度具备的多个(在本实施方式中为3根)第1棒状体23a、多个(在本实施方式中为5根)第2棒状体23b及多个(在本实施方式中为5根)第3棒状体23c,在容器上下方向d3上排列多个,由此以在上下方向z上排列的状态具备多个支承部23。
43.支承部23借助多个第1棒状体23a将板状体b的容器左右方向d2的中央部从下方支承,并将板状体b的容器左右方向d2的右侧部(位于与中央部相比在容器左右方向d2上靠右侧的位置的部分)用多个第2棒状体23b从下方支承,将板状体b的容器左右方向d2的左侧部(位于与中央部相比在容器左右方向d2上靠左侧的位置的部分)用多个第3棒状体23c从下方支承。并且,构成为,通过这样地借助支承部23将板状体b从下方支承,将容纳于容纳空间21的板状体b借助支承部23(特别是多个第1棒状体23a)定位。
44.〔检查部〕如图5及图6所示,检查部7具备将容纳容器1从下方支承的支承台31、用于检查容纳容器1的检查装置19。检查部7和容器出入部6设置于在架长边方向x上一台堆垛起重机3行进的范围内,以能够借助一台堆垛起重机3直接搬运的位置关系设置。在本实施方式中,在相同的收纳架2具备检查部7和容器出入部6,检查部7和容器出入部6在架长边方向x上相邻。另外,支承台31相当于检查用的载置部。
45.在支承台31处具备对中装置32。该对中装置32为,在载置于支承台31的容纳容器1的上下方向z上观察的位置为从适当位置(图4所示的位置)在水平方向(架长边方向x及架纵深方向y)上位置偏离的情况下,使该容纳容器1向适当位置移动。
46.对中装置32具备多个支承容纳容器1并且对容纳容器1的侧面进行推压操作的支承操作机构33。在本实施方式中,对中装置32具备4个支承操作机构33。即,对中装置32具备从架长边方向x的右侧对容纳容器1的侧面进行推压操作的支承操作机构33、从架长边方向x的左侧对容纳容器1的侧面进行推压操作的支承操作机构33、从架纵深方向y的前侧对容纳容器1的侧面进行推压操作的支承操作机构33、从架纵深方向y的后侧对容纳容器1的侧面进行推压操作的支承操作机构33。
47.如图7及图8所示,支承操作机构33具备固定于支承台31的基部36、将容纳容器1从下方支承的容器支承部37、对容纳容器1的侧面进行推压操作的推压部38、使容器支承部37和推压部38联动的联动部39。容器支承部37被沿上下方向z移动自如地支承于基部36。推压部38以相对于位于检查部7的容纳容器1远近移动的方式,被沿水平方向(架长边方向x或架纵深方向y)移动自如地支承于基部36。并且,联动部39使容器支承部37和推压部38联动,使得随着容器支承部37向下方移动,推压部38向相对于容纳容器1接近的一侧移动,随着容器支承部37向上方移动,推压部38向相对于容纳容器1远离的一侧移动。
48.对支承操作机构33的各结构加以说明。
49.联动部39被绕沿水平方向的摆动轴心摆动自如地支承于基部36。容器支承部37由
被旋转自如地支承于联动部39的辊体构成,经由联动部39支承于基部36。推压部38由旋转自如地支承于联动部39的辊体构成,经由联动部39支承于基部36。并且,联动部39绕摆动轴心摆动,由此姿势改变成待机姿势(参照图7)和支承姿势(参照图8)。联动部39借助施力部件(图中未示出),被从支承姿势向待机姿势施力,在支承台31未将容纳容器1支承的状态下,联动部39呈待机姿势。这样在联动部39呈待机姿势的状态下,如图7所示,容器支承部37位于上方位置,推压部38位于离开位置。
50.并且,如图8所示,在检查部7处在支承台31支承有容纳容器1的状态下,将该容纳容器1的高度作为支承高度,在容纳容器1借助堆垛起重机3搬运至检查部7的情况下,堆垛起重机3在以比支承高度高的搬运高度(参照图7)支承的状态下,使容纳容器1向架纵深方向y的后侧移动后,使容纳容器1从搬运高度下降至支承高度。这样,使容纳容器1从搬运高度下降至支承高度,由此由于容纳容器1的载荷,容器支承部37从上方位置向下方位置移动,并且借助位于下方位置的容器支承部37,容纳容器1被在支承高度支承。
51.并且,这样随着容器支承部37移动至下方位置,推压部38从离开位置(参照图7)向接近位置(参照图8)移动。容纳容器1从搬运高度下降至支承高度时,在容纳容器1的上下方向z上观察的位置在水平方向上从适当位置偏离的情况下,借助向接近位置移动的推压部38,容纳容器1的侧面被进行推压操作,容纳容器1的位置被修正至适当位置。
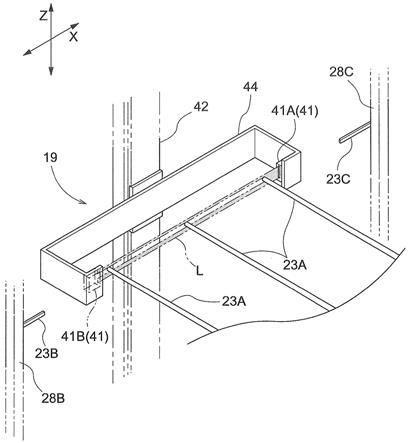
52.〔检查装置〕如图4、图6及图9所示,检查装置19具备检测体41、将检测体41在上下方向z上引导的引导体42、使该检测体41移动的驱动部43、控制驱动部43的控制部h(参照图5),将容纳板状体b的容纳容器1作为检查对象。并且,控制部h基于检测体41的检测信息判定在第1棒状体23a是否发生歪斜。
53.检测体41以将投光部41a和受光部41b在架长边方向x(容器左右方向d2)上排列的状态具备投光部41a和受光部41b。并且,投光部41a将在上下方向z(容器上下方向d3)上具有宽度的带状的检测光l向受光部41b投光。投光部41a和受光部41b连结于共同的连结体44,相对位置固定。驱动部43使检测体41在上下方向z上移动。并且,控制部h根据表示投光部41a及受光部41b的高度的信息、受光部41b接受的检测光l的信息,判断在容纳容器1具备的多个第1棒状体23a是否产生歪斜。另外,在控制部h上,储存有表示将容纳容器1载置于支承台31的状态的在上下方向z上排列的多个第1棒状体23a的每一个的高度的高度信息、表示第1棒状体23a的上下方向z的粗细的粗细信息。
54.接着,关于检测体41加以说明,但在说明检测体41和容纳容器1的位置关系的情况下,在没有特别说明的情况下,将容纳容器1被支承于支承台31的状态作为前提来说明。并且,将架长边方向x的一侧(右侧)作为第1侧x1,将其相反的一侧(左侧)作为第2侧x2,在架长边方向x上,将以相同高度装备于容纳容器1的多个第1棒状体23a的从位于最靠第1侧x1的第1棒状体23a至位于最靠第2侧x2的第1棒状体23a的范围设为配置区域e。
55.并且,投光部41a相对于配置区域e位于第2侧x2,受光部41b相对于配置区域e位于第1侧x1。这样,投光部41a和受光部41b配置于,包括被包括于支承部23的多个第1棒状体23a的配置区域e的架长边方向x(容器左右方向d2)的外侧。
56.此外,在使投光部41a及受光部41b升降至与第1棒状体23a对应的高度的状态下,投光部41a和受光部41b在使容纳容器1载置于支承台31的状态下,在投光部41a和受光部
41b之间配置于供第1棒状体23a的末端部通过的那样的第1方向的架纵深方向y的位置。因此,在使投光部41a及受光部41b升降至与第1棒状体23a对应的高度的状态下,从投光部41a投光的带状的检测光l被第1棒状体23a的末端部部分地隔断。
57.此外,投光部41a在架长边方向x上位于第1棒状体23a和第3棒状体23c之间,受光部41b在架长边方向x上位于第1棒状体23a和第2棒状体23b之间。即,投光部41a和受光部41b位于第2棒状体23b和第3棒状体23c之间,同时相对于多个第1棒状体23a的配置区域e在架长边方向x上配置于外侧。因此,投光部41a、受光部41b能够在不与第1棒状体23a、第2棒状体23b及第3棒状体23c干涉的情况下在上下方向z上移动。
58.接着,对控制部h执行的检查控制进行说明。
59.在控制部h执行检查控制前,检测体41位于待机高度(图5所示的高度)。该待机高度是比搬运高度的容纳容器1的下框27高的高度,且位于支承高度的容纳容器1的比上框26低的高度。并且,控制部h若被存在与否传感器(图中未示出)检测出载置于支承台31,则执行检查控制。
60.通过检查控制,从待机高度下降至开始高度后,上升至结束高度,其后下降至待机高度。开始高度为,与在上下方向z上排列的多个第1棒状体23a的位于最下方的第1棒状体23a对应的高度。在检测体41位于开始高度的状态下,位于最下方的适当姿势的第1棒状体23a的末端部位于检测光l的上下方向z的中央部。结束高度是与在上下方向z上排列的多个第1棒状体23a的位于最上方的第1棒状体23a对应的高度。在检测体41位于结束高度的状态下,位于最上方的适当姿势的第1棒状体23a的末端部位于检测光l的上下方向z的中央部。
61.并且,通过检查控制,分别在沿上下方向z排列的多个第1棒状体23a的设定高度,确认受光部41b的检测光l的受光状态,关于设置于各设定高度的多个第1棒状体23a,判断在第1棒状体23a处是否发生歪斜。具体地,例如,关于在上下方向z上排列的多个第1棒状体23a的位于最下方的5根第1棒状体23a,在使检测体41位于与位于最下方的5根第1棒状体23a对应的高度(开始高度)的状态下,确认受光部41b的检测光l的受光状态。此时,受光部41b未接受到检测光l的上下方向z的范围如图10所示,为对第1棒状体23a的上下方向z的宽度加上允许偏离量的宽度以下,并且未接受到检测光l的上下方向z的位置为被预先设定的位置的情况下,判断成在位于最下方的5根第1棒状体23a上未产生歪斜。此外,受光部41b未接受到检测光l的上下方向z的范围如图11、图12所示,比在第1棒状体23a的上下方向z的宽度上加上允许偏离量的宽度大的情况、未接受到检测光l的上下方向z的位置在上下方向z上从预先设定的位置偏离的情况下,判断成在位于最下方的5根第1棒状体23a上产生歪斜。将这样的判断与使检测体41从开始高度上升至结束高度对应,相对于在上下方向z上排列的多个第1棒状体23a进行。
62.2.其他实施方式接着,对检查装置的其他实施方式进行说明。
63.(1)在上述实施方式中,将容器主体22组合构成为框材,但容器主体22的结构也可以适当改变。具体地,例如,也可以构成为,在将框材组合的容器主体22的左右的侧面、上表面及下表面具备板材,使容器主体22横倒的筒状。此外,在这样地构成为使容器主体22横倒的筒状的情况下,也可以构成为,以堵塞容器主体22的前表面的方式安装风扇过滤器单元,将被风扇过滤器单元洁净化的外气吸入至容纳空间21。
64.(2)在上述实施方式中,将投光部41a和受光部41b在使容纳容器1支承于支承台31的状态下,配置于从出入口29向容纳空间21内进入的位置,但也可以适当改变投光部41a和受光部41b的配置。具体地,也可以是,例如,将投光部41a和受光部41b配置成相对于容器主体22位于容器左右方向d2的外侧,使投光部41a从容纳空间21的外部向受光部41b投射检测光l,受光部41b在容纳空间21的外部接受通过容纳空间21的检测光l。
65.(3)在上述实施方式中,将投光部41a和受光部41b连结于共同的连结体44,借助单一的驱动部43,使投光部41a和受光部41b一体地在容器上下方向d3上移动,但也可以是,作为驱动部43,具备使投光部41a沿容器上下方向d3移动的驱动部43和使受光部41b沿容器上下方向d3移动的驱动部43,使投光部41a和受光部41b分别向容器上下方向d3移动。
66.(4)在上述实施方式中,设置成,利用借助堆垛起重机3将容纳容器1向支承台31搬运时的动作,投光部41a和受光部41b从出入口29向容纳空间21进入,但也可以是,具备使投光部41a和受光部41b沿容器前后方向d1移动的第2驱动部,在容纳容器1被支承于支承台31的状态下,借助第2驱动部使投光部41a和受光部41b沿容器前后方向d1移动,投光部41a及受光部41b相对于容纳空间21向容器前后方向d1的后侧的位置(容纳空间21的外部的位置)移动,投光部41a及受光部41b相对于容纳空间21向容器前后方向d1的前侧的位置(向容纳空间21进入的位置)移动。
67.(5)在上述实施方式中,将支承部23由多个第1棒状体23a、多个第2棒状体23b、多个第3棒状体23c构成,但也可以仅将支承部23由多个第1棒状体23a构成,也可以仅将支承部23由多个第1棒状体23a、多个第2棒状体23b或多个第3棒状体23c的某一方构成。
68.此外,在容纳容器1具备包括第1棒状体23a的支承部23,但也可以在容纳容器1不具备包括第1棒状体23a的支承部23。具体地,也可以是,在容纳容器1的底面具备支承板,在该支承板上,将板状体b以沿着容器前后方向d1及容器上下方向d3的姿势(纵向姿势)容纳,借助相对于该板状体b位于容器左右方向d2的两侧的多个第1棒状体23a,将板状体b的容器左右方向d2处的位置定位。
69.(6)在上述实施方式中,将第1方向设为容器前后方向d1,将第2方向设为容器左右方向d2,将第3方向设为容器上下方向d3,但也可以适当改变这些方向的关系。具体地,例如,也可以将第1方向设为容器上下方向d3,将多个第1棒状体23a的每一个以沿着容器上下方向d3的姿势设置,此外,也可以将第2方向作为容器上下方向d3,将投光部41a和受光部41b以在容器上下方向d3上排列的状态具备。
70.(7)在上述实施方式中,将容纳于容纳容器1的容纳物设为板状体b,但容纳于容纳容器1的容纳物也可以是晶片等其他板状体,此外,容纳物的形状也可以是箱状或圆柱状等其他形状。
71.(8)另外,上述各实施方式所公开的结构,只要不产生矛盾,就也能够与其他实施方式所公开的结构组合来应用。关于该其他结构,在本说明书中公开的实施方式在所有的方面都仅是例示。因此,在不脱离本发明的宗旨的范围内,能够适当地进行各种的改变。
72.3.上述实施方式的概要以下,在上述说明的检查装置的概要进行说明。
73.一种检查装置,前述检查装置具备检测体和使前述检测体移动的驱动部,把将容纳物容纳的容纳容器作为检查对象,其特征在于,前述容纳容器具备容器主体和多个棒状
体,前述容器主体具有将前述容纳物容纳的容纳空间,前述多个棒状体被设置于前述容纳空间,将容纳于前述容纳空间的前述容纳物定位,多个前述棒状体分别被以沿着第1方向的姿势设置,并且以前述棒状体的作为一侧的端部的基端部固定于前述容器主体、作为另一侧的端部的末端部未被固定的悬臂状态被支承于前述容器主体,多个前述棒状体以分别在第2方向和第3方向上排列多个的状态配置,前述第2方向相对于前述第1方向正交,前述第3方向相对于前述第1方向及前述第2方向正交,前述驱动部使前述检测体向前述第3方向移动,前述检测体以将投光部和受光部在前述第2方向上排列的状态具备投光部和受光部,前述投光部将在前述第3方向上具有宽度的带状的检测光向前述受光部投光,前述投光部和前述受光部以将前述容器主体载置于检查用的载置部的状态,配置于前述末端部通过前述投光部和前述受光部之间那样的前述第1方向的位置。
74.根据这样的结构,容纳容器能够以借助多个棒状体定位的状态将容纳物容纳。并且,在这样的容纳容器中,有由于容纳的容纳物的载荷、棒状体的自重而在棒状体上发生歪斜的可能性,但能够通过借助检查装置进行检查来如下所述地检测棒状体的歪斜。
75.若将在棒状体上未发生歪斜的情况的棒状体的末端部的位置设为适当位置,则在棒状体上发生歪斜的情况下,棒状体的末端部的位置从适当位置偏离。并且,检测装置基于使检测体移动时的检测体的第3方向上的位置、带状的检测光的被棒状体隔断的位置,能够检测棒状体的末端部的第3方向上的位置,能够检测从棒状体的末端部的适当位置偏离的位置,即能够检测棒状体的歪斜。
76.此外,借助驱动部使检测体在第3方向上移动来检测棒状体的末端部的位置,由此不需要使容纳容器移动。并且,检测体与容纳容器相比为小型且轻量,所以与使容纳容器移动的情况相比,能够抑制检查装置的制造成本。
77.这样,能够提供一种检查装置,前述检查装置在能够检测容纳容器所具备的棒状体的歪斜的同时,能够抑制制造成本。
78.这里,优选的是,将前述第1方向设为容器前后方向,将前述第2方向设为容器左右方向,将前述第3方向设为容器上下方向,前述容纳物是以沿前述容器前后方向及前述容器左右方向的姿势容纳于前述容纳空间的板状体,前述容纳容器以将支承部在前述容器上下方向上排列的状态具备多个支承部,前述支承部将容纳于前述容纳空间的前述板状体从下方支承,多个前述支承部分别包括在前述容器左右方向上排列成一列的多个前述棒状体,前述投光部和前述受光部相对于前述支承部的每一个所包括的多个前述棒状体的配置区域,配置于前述容器左右方向的外侧。
79.根据该方案,使多个支承部分别支承板状体,由此能够在容纳容器上将多个板状体以在容器上下方向上排列的状态容纳。并且,通过这样地容纳板状体,板状体被在容器左右方向上排列成一列的棒状体从下方支承。棒状体由于板状体的载荷、棒状体的自重,有棒状体以棒状体的末端部向下方下降的方式歪斜的可能性,但能够通过借助检查装置检查来检测棒状体的歪斜。
80.投光部和受光部被相对于支承部的每一个所包括的多个棒状体的配置区域配置于容器左右方向的外侧,所以借助投光部和受光部,能够将一个支承部所包括的多个棒状体的末端部的位置汇总来检测。因此,不需要具备多个投光部和受光部的组,所以能够抑制检测部的成本。
81.此外,优选的是,前述投光部和前述受光部连结于共同的连结体,相对位置被固定。
82.根据该方案,投光部和受光部借助连结体,相对位置被固定,所以借助驱动部使投光部和受光部沿第3方向移动的情况下,投光部和受光部的相对的位置不会偏离。因此,能够避免,投光部和受光部在第3方向上相对地偏离而在棒状体的检测上产生误差。
83.此外,优选的是,前述容纳容器相对于前述容纳空间,在前述第1方向的一侧,形成使前述容纳物相对于前述容纳空间出入的出入口,前述投光部和前述受光部在使前述容纳容器载置于前述载置部的状态下,配置于从前述出入口进入至前述容纳空间内的位置。
84.根据该方案,在使容纳容器载置于载置部的状态下,在第2方向上,投光部和受光部位于容器主体的内侧。因此,例如,在第2方向上,在投光部和受光部位于容器主体的外侧的情况下,需要考虑容纳容器的形状、检测部的设置位置,使得从投光部投射的检测光不与容器主体干涉,但通过在第2方向上使投光部和受光部位于容器主体的内侧,不需要如上所述地考虑容纳容器的形状、检测部的设置位置。
85.产业上的可利用性本发明的技术能够利用于把将容纳物容纳的容纳容器作为检查对象的检查装置。
86.附图标记说明1:容纳容器19:检查装置21:容纳空间22:容器主体23:支承部23a:第1棒状体(棒状体)29:出入口31:支承台(载置部)41:检测体41a:投光部41b:受光部43:驱动部b:板状体(容纳物)d1:容器前后方向(第1方向)d2:容器左右方向(第2方向)d3:容器上下方向(第3方向)e:配置区域。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。