1.本发明实施例涉及电网巡检技术领域,具体涉及一种面向输电杆塔精细化巡检的航线生成方法。
背景技术:
2.目前电网精细化巡检的航迹/线制作依据激光雷达数据,很大程度还是依靠人工手动规划生产,数据处理的工作量大,处理标准不统一,缺乏规范性,自动化程度低,生产的精细化巡检航迹/线数据缺乏统一的管理,无法满足现阶段在电网巡检安全运维中国家电网提出的实现智能化、自动化的巡检要求。
技术实现要素:
3.为此,本发明实施例提供一种面向输电杆塔精细化巡检的航线生成方法,以解决现有技术中由于电网巡检人工手动规划巡检路线不科学和自动化低的问题。
4.为了实现上述目的,本发明实施例提供如下技术方案:
5.根据本发明实施例公开的一种面向输电杆塔精细化巡检的航线生成方法,具体包括以下操作步骤:
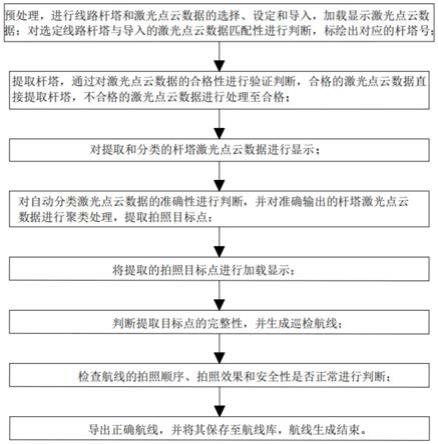
6.预处理,进行线路杆塔和激光点云数据的选择、设定和导入,加载显示激光点云数据;对选定线路杆塔与导入的激光点云数据匹配性进行判断,标绘出对应的杆塔号;
7.提取杆塔,通过对激光点云数据的合格性进行验证判断,合格的激光点云数据直接提取杆塔,不合格的激光点云数据进行处理至合格;
8.对提取和分类的杆塔激光点云数据进行显示;
9.对自动分类激光点云数据的准确性进行判断,并对准确输出的杆塔激光点云数据进行聚类处理,提取拍照目标点;
10.将提取的拍照目标点进行加载显示;
11.判断提取目标点的完整性,并生成巡检航线;
12.检查航线的拍照顺序、拍照效果和安全性是否正常进行判断;
13.导出正确航线,并将其保存至航线库,航线生成结束。
14.进一步地,预处理具体包括以下步骤:
15.web客户端用户在浏览器页面对需要进行巡检规划航线的线路杆塔进行选择,并选定激光点云数据“是否分类”和所属度带;
16.将线路杆塔信息、是否分类和所属度带及对应的激光点云数据通过http、websocket等通讯协议传送到网站服务器中进行处理;
17.网站服务器对传入的激光点云数据进行规范化处理,判断激光点云数据与所选定的线路塔杆是否匹配;如果匹配,则进行下一步;如不匹配,则返回到重新上传激光点云数据或者线路杆塔台账数据进行处理,直至匹配合格;
18.之后,网站服务器通过http、websocket等通讯协议将处理后的激光点云数据推向
web客户端;web客户端用户在浏览器页面的三维可视化界面自动加载展示的三维激光点云数据,并自动标绘对应的杆塔号。
19.进一步地,提取杆塔具体包括以下操作:
20.网站服务端对网站客户端展示的激光点云数据进行合格性验证;如果验证合格,则提取杆塔;如果验证不合格,则网站服务端通过对缺失部位的激光点云数据自动补全至合格,然后提取杆塔。
21.进一步地,激光点云数据的合格性验证为激光点云数据中杆塔本体和绝缘子串的结构的完整性进行验证;网站服务端通过人工智能模型的镜像法对缺失部位的激光点云数据自动补全至合格。
22.进一步地,对提取和分类的杆塔激光点云数据进行显示,具体包括以下操作:
23.网站服务端对上传的激光点云数据的分类与预处理中激光点云数据选定的“是否分类”的匹配性进行判断,并将判断结果推送到网站客户端中;
24.如果匹配,网站客户端将选择的激光点云数据和线路杆塔台账信息推送至网站服务端,网站服务端自动提取杆塔点云并通过人工智能模型对杆塔本体、导地线和绝缘子串进行自动分类处理,并将处理结果推送至网站客户端中;如果不匹配,网站客户端页面给出提示,点云分类情况和选择的“是否分类”不匹配,请重新操作,此轮提塔终止;重新选择“是否分类”或上传新的激光点云数据,直到相互匹配成功,再进行提塔;
25.网站客户端的三维窗口对已经提取和分类的杆塔激光点云数据进行显示。
26.进一步地,对自动分类激光点云数据的准确性进行判断,并对准确输出的杆塔激光点云数据进行聚类处理,提取拍照目标点,具体包括以下操作:网站客户端对网站服务端自动分类的激光点云数据的准确性进行判断;如果不准确,网站客户端进行手动修改杆塔激光点云数据分类至正确;如果准确,网站客户端将已经提取杆塔激光点云数据推送至网站服务端进行聚类处理,并提取拍照目标点。
27.进一步地,将提取的拍照目标点进行加载显示,具体包括以下操作:网站服务端将提取的拍照目标点推送至网站客户端进行加载显示。
28.进一步地,判断提取目标点的完整性,并生成巡检航线,具体包括以下操作:
29.对提取的目标点的完整性进行判断;如果判断完整,网站客户端对旋翼无人机类型、云台信息、安全碰撞检测距离进行配置,并将这些信息推送至网站服务端;如果判断不完整,网站客户端手动添加拍照目标点直至完整;
30.网站客户端将完整的拍照目标点信息推送至网站服务端,并生成精细化巡检航线;
31.网站服务端将提生成的精细化巡检航线信息推送至网站服务端进行加载,并对未通过安全碰撞检测的航线给出提示。
32.进一步地,检查航线的拍照顺序、拍照效果和安全性是否正常进行判断,具体包括以下操作:通过网站客户端判断航线拍照顺序、拍照效果和安全性是否正常;如果判断正常,则导出航线,并将其保存至航线库;如果判断不正常,网站客户端对航线进行修改,将相关信息发送至网站服务端,重新生成符合国网规范要求的航线再进行导出,并保存至航线库。
33.本发明实施例具有如下优点:
34.本发明通过高精度三维点云数据,依据国家电网公司对架空输电线路多旋翼无人机精细化巡检的要求,从巡检的拍摄内容、拍摄顺序、拍摄照片效果、安全要求等出发,以高效的空间几何算法为支撑,通过大数据分析,结合人工智能(ai)算法,设计出了一种面向输电杆塔精细化巡检的web端航线生成方法,进而实现电网精细化巡检航迹/线的智能化、自动化生产,降低人工成本,提高作业效率,提升电网运维的科学发展。
附图说明
35.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
36.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
37.图1为本发明实施例提供的面向输电杆塔精细化巡检的航线生成方法的流程图;
38.图2为本发明实施例提供的预处理的详细操作步骤流程图;
39.图3为本发明实施例提供的提取杆塔的详细操作步骤流程图;
40.图4为本发明实施例提供的显示杆塔激光点云的步骤流程图;
41.图5为本发明实施例提供的激光点云准确性的步骤流程图;
42.图6为本发明实施例提供的激光点云完整性判断和生成巡检航线的步骤流程图;
43.图7为本发明实施例提供的航线判断步骤的流程图;
44.图8为本发明实施例提供的激光点云数据补全方法的流程图。
具体实施方式
45.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
46.结合图1所示,本发明具体公开了一种面向输电杆塔精细化巡检的航线生成方法,具体包括以下操作步骤:
47.预处理,进行线路杆塔和激光点云数据的选择、设定和导入,加载显示点云数据;对选定线路杆塔与导入的激光点云数据匹配性进行判断,标绘出对应的杆塔号;
48.提取杆塔,通过对激光点云数据的合格性进行验证判断,合格的激光点云数据直接提取杆塔,不合格的激光点云数据进行处理至合格;
49.对提取和分类的杆塔激光点云数据进行显示;
50.对自动分类激光点云数据的准确性进行判断,并对准确输出的杆塔激光点云数据进行聚类处理,提取拍照目标点;
51.将提取的拍照目标点进行加载显示;
52.判断提取目标点的完整性,并生成巡检航线;
53.检查航线的拍照顺序、拍照效果和安全性是否正常进行判断;
54.导出正确航线,并将其保存至航线库,航线生成结束。
55.本发明通过高精度三维点云数据,依据国家电网公司对架空输电线路多旋翼无人机精细化巡检的要求,从巡检的拍摄内容、拍摄顺序、拍摄照片效果、安全要求等出发,以高效的空间几何算法为支撑,通过大数据分析,结合人工智能(ai)算法,设计出了一种面向输电杆塔精细化巡检的航线生成方法,进而实现电网精细化巡检航迹/线的智能化、自动化生产,降低人工成本,提高作业效率,提升电网运维的科学发展。
56.结合图2所示,本发明实施例一具体公开了一种面向输电杆塔精细化巡检的航线生成方法,其中预处理具体包括以下步骤:
57.s101、web客户端用户在浏览器页面对需要进行巡检规划航线的线路杆塔进行选择,并选定激光点云数据“是否分类”和所属度带;
58.s102、将线路杆塔信息、是否分类和所属度带及对应的激光点云数据通过http、websocket等通讯协议等传送到网站服务器中进行处理;
59.s103、网站服务器对传入的激光点云数据进行规范化处理,判断激光点云数据与所选定的线路塔杆是否匹配;如果匹配,则进行下一步;如不匹配,则返回到重新上传激光点云数据或者线路杆塔台账数据进行处理,直至匹配合格;
60.s104、之后,网站服务器通过http、websocket等通讯协议,将处理后的激光点云数据推向网站web客户端;web客户端用户在浏览器页面的三维可视化界面自动加载展示的三维激光点云数据,并自动标绘对应的杆塔号。
61.s105、网站服务端的三维可视化界面自动加载展示的维激光点云数据,并自动标绘对应的杆塔号。
62.结合图3所示,本发明实施例二具体公开了一种面向输电杆塔精细化巡检的航线生成方法,其中提取杆塔具体包括以下步骤:网站服务端对网站客户端展示的激光点云数据进行合格性验证;如果验证合格,则提取杆塔;如果验证不合格,则网站服务端通过对缺失部位的激光点云数据自动补全至合格,然后提取杆塔。
63.结合图4所示,本发明实施例三具体公开了一种面向输电杆塔精细化巡检的航线生成方法,其中对提取和分类的杆塔激光点云数据进行显示,具体包括以下操作:
64.s201、网站服务端对上传的激光点云数据的分类与预处理中激光点云数据选定的“是否分类”的匹配性进行判断,并将判断结果推送到网站客户端中;
65.s202、如果匹配,网站客户端将上传的激光点云数据和线路杆塔台账信息推送至网站服务端,网站服务端自动提取杆塔点云并通过人工智能模型对杆塔本体、导地线和绝缘子串进行自动分类处理,并将处理结果推送至网站客户端中;如果不匹配,网站客户端页面给出提示,点云分类情况和选择的“是否分类”不匹配,请重新操作,此轮提塔终止;重新选择“是否分类”或上传新的激光点云数据,直到相互匹配成功,再进行提塔;
66.s203、网站客户端的三维窗口对已经提取和分类的杆塔激光点云数据进行显示。
67.结合图5所示,本发明实施例四具体公开了一种面向输电杆塔精细化巡检的航线生成方法,对自动分类激光点云数据的准确性进行判断,并对准确输出的杆塔激光点云数据进行聚类处理,提取拍照目标点,具体包括以下操作:
68.网站客户端对网站服务端自动分类的激光点云数据的准确性进行判断;如果不准确,网站客户端进行手动修改杆塔激光点云数据分类至正确;如果准确,网站客户端将已经提取杆塔激光点云数据推送至网站服务端进行聚类处理,并提取拍照目标点。
69.将提取的拍照目标点进行加载显示,具体包括以下操作:网站服务端将提取的拍照目标点推送至网站客户端进行加载显示。网站服务端将提取的拍照目标点推送至网站客户端进行加载显示。
70.结合图6所示,本发明实施例五具体公开了一种面向输电杆塔精细化巡检的航线生成方法,判断提取目标点的完整性,并生成巡检航线,具体包括以下操作:
71.s301、对提取的目标点的完整性进行判断;如果判断完整,网站客户端对旋翼无人机类型、云台信息、安全碰撞检测距离进行配置,并将这些信息推送至网站服务端;如果判断不完整,网站客户端手动添加拍照目标点直至完整;
72.s302、网站客户端将提取的拍照目标点信息推送至网站服务端,并生成精细化巡检航线;
73.s303、网站服务端将提生成的精细化巡检航线信息推送至网站服务端进行加载,并对未通过安全碰撞检测的航线给出提示。
74.结合图7所示,本发明实施例六具体公开了一种面向输电杆塔精细化巡检的航线生成方法,判断提取目标点的完整性,并生成巡检航线,具体包括以下操作:
75.s401、对提取的目标点的完整性进行判断;如果判断完整,网站客户端对旋翼无人机类型、云台信息、安全碰撞检测距离进行配置,并将这些信息推送至网站服务端;如果判断不完整,网站客户端手动添加拍照目标点直至完整;
76.s402、网站客户端将提取的拍照目标点信息推送至网站服务端,并生成精细化巡检航线;
77.s403、网站服务端将提生成的精细化巡检航线信息推送至网站服务端进行加载,并对未通过安全碰撞检测的航线给出提示。
78.检查航线的拍照顺序、拍照效果和安全性是否正常进行判断,具体包括以下操作:通过网站客户端判断航线拍照顺序、拍照效果和安全性是否正常;如果判断正常,则导出航线,并将其保存至航线库;如果判断不正常,网站客户端对航线进行修改,将相关信息发送至网站服务端,重新生成符合国网规范要求的航线再进行导出,并保存至航线库。
79.结合图8所示,本发明具体实施例七还公开了一种基于生成对抗网站的输电线路杆塔点云自动补全方法,能够对采集到的杆塔点云数据中存在的稀疏以及部分缺失情况进行补全,进而提升精细化巡检航线制作的效率和质量。
80.该方法具体包括以下步骤:
81.激光点云数据的准备:将采集的激光点云数据分为两部分:训练激光点云数据和测试激光点云数据。对采集的激光点云数据以每个点为中心计算点密度,取半径4米范围内且点密度大于64的点云数据为完整数据,作为训练激光点云数据,用于训练集使用;其余数据为稀疏激光点云数据,作为测试激光点云数据,用于测试集使用;对完整激光点云数据进行随机抽稀,部分删除等处理,得到对应的稀疏激光点云数据,两者一起构成训练集;
82.生成器模型进行处理:生成器模型采用编码
‑
解码结构。解码过程使用kpconvnet网站进行抽稀的同时提取局部特征。解码过程对局部点密度小于阈值的区域进行补全激光
点云。编码器为五层结构,每层间通过最远点采样算法进行下采样,并通过核心点卷积进行特征提取。解码器为五层结构,每层采样点与编码器相同。对采样点周围点密度小于阈值的部分,进行点云补全。并通过两层感知机进行特征变换后输入下一层解码器。
83.判别器模型进行处理:判别器模型采用kpconvnet网站,结构与生成器编码部分相同,用于对输入点云数据完整性进行判断。
84.损失函数的计算:损失使用wasserstein距离来计算。wasserstein距离可以很好的处理两个分布没有重叠的情况,在损失计算方面,更加平滑。
85.训练优化模型:训练模型时,将训练集中抽稀(或部分删除)的点云数据输入生成器模型,得到补全的点云数据;将生成器生成的补全点云数据与对应的完整点云数据输入判别器,计算损失。通过梯度下降算法,优化模型参数。
86.结束:训练完毕后,固定模型参数,将稀疏点云输入生成器模型即可得到对应的补全激光点云。
87.本发明通过高精度三维点云数据,依据国家电网公司对架空输电线路多旋翼无人机精细化巡检的要求,从巡检的拍摄内容、拍摄顺序、拍摄照片效果、安全要求等出发,以高效的空间几何算法为支撑,通过大数据分析,结合人工智能(ai)算法,设计出了一种面向输电杆塔精细化巡检的航线生成方法,进而实现电网精细化巡检航迹/线的智能化、自动化生产,降低人工成本,提高作业效率,提升电网运维的科学发展。
88.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。