技术特征:
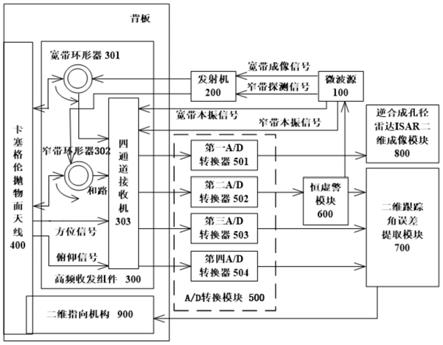
1.一种自主探测成像一体化雷达装置,其特征在于,包括:微波源(100),其用于生成窄带探测信号,宽带成像信号,窄带本振信号和宽带本振信号;发射机(200),其与所述微波源(100)连接,用于对接收到的所述窄带探测信号和所述宽带成像信号的功率进行放大处理;高频收发组件(300),其分别与所述微波源(100)和所述发射机(200)连接,用于传递其接收到所述发射机(200)所输出的所述窄带探测信号和所述宽带成像信号,并处理接收到的所述窄带本振信号和所述宽带本振信号;五喇叭馈源的卡塞格伦抛物面天线(400),其与所述高频收发组件(300)连接,用于发射所述高频收发组件(300)输出的所述窄带探测信号和所述宽带成像信号,以及接收相应的窄带回波信号和宽带回波信号;a/d转换模块(500),其与所述高频收发组件(300)连接,用于将所述高频收发组件(300)所反馈的信号转换为数字信号;恒虚警模块(600),其分别与所述a/d转换模块(500)和所述微波源(100)连接,用于根据接收到的所述数字信号获得目标的位置信息,以及用于控制所述微波源(100)产生所述宽带本振信号的时刻和输出所述探测窄带本振信号的时间;二维跟踪角误差提取模块(700),其分别与所述a/d转换模块(500)和所述恒虚警模块(600)连接,用于获得所述目标的跟踪角误差;逆合成孔径雷达isar二维成像模块(800),其与所述a/d转换模块(500)连接,用于获得所述目标的逆合成孔径雷达isar图像;二维指向机构(900),其分别与所述卡塞格伦抛物面天线(400)和所述二维跟踪角误差提取模块(700)连接,所述二维指向机构(900)根据所述跟踪角误差,控制所述卡塞格伦抛物面天线(400)稳定跟踪所述目标。2.如权利要求1所述的自主探测成像一体化雷达装置,其特征在于,所述五喇叭馈源的卡塞格伦抛物面天线(400),包括:波导转接板(401),其包含和差网络(4012)和宽带信号通道(4011),且与所述高频收发组件(300)连接;馈源中心喇叭(402),其通过所述宽带信号通道(4011)与所述高频接收组件(300)连接,用于发射接收到的所述宽带成像信号和接收对应的宽带回波信号;边缘四路喇叭(403),其通过所述和差网络(4012)与所述高频接收组件(500)连接,用于发射接收到的所述窄带探测信号和接收对应的窄带回波信号。3.如权利要求2所述的自主探测成像一体化雷达装置,其特征在于,所述高频收发组件(300)包括:宽带环形器(301),窄带环形器(302)和四通道接收机(303);所述四通道接收机(303)包含宽带接收通道(3031),窄带和路通道(3032)、窄带方位通道(3033)和窄带俯仰通道(3034);所述宽带环形器(301)分别与所述波导转接板(401)的所述宽带信号通道(4011),所述发射机(200)的宽带信号输出接口,以及所述四通道接收机(303)的宽带接收通道(3031)连接;所述窄带环形器(302),其分别与所述波导转接板(401)的所述和差网络(4012)的接
口,所述发射机(200)的窄带信号输出接口,以及所述四通道接收机(303)的所述窄带和路通道(3032)连接;所述四通道接收机(303)的所述窄带方位通道(3033)和所述窄带俯仰通道(3044)均与所述和差网络(4012)的接口连接;所述宽带接收通道(3031)还与所述微波源(100)的宽带本振输出接口连接,用于接收所述宽带本振信号;所述窄带和路通道(3032)、所述窄带方位通道(3033)和所述窄带俯仰通道(3034)还均与所述微波源(100)的窄带本振输出接口连接,用于接收所述窄带本振信号;所述宽带环形器(301)用于将从所述宽带输出接口接收到的所述宽带成像信号经过所述宽带信号通道(4011)传输至所述馈源中心喇叭(402)中;所述馈源中心喇叭(402)用于将接收到的所述宽带成像信号向外发射,并接收对应的宽带回波信号;所述宽带环形器(301)还用于将从所述宽带信号通道(4011)反馈的所述宽带回波信号传输至所述宽带接收通道(3031)内;所述宽带接收通道(3031)用于将接收到的所述宽带回波信号与所述宽带本振信号进行去调谐处理,得到中频模拟宽带回波信号,并将所述中频模拟宽带回波信号输入至所述a/d转换模块(500)中;所述窄带环形器(302)用于将接收到的所述窄带探测信号经过所述和差网络(4012)的接口传输至所述边缘四路喇叭(403)中,所述边缘四路喇叭(403)用于将接收到的所述窄带探测信号向外辐射并接收对应的窄带回波信号;所述和差网络(4012)还用于根据接收到的所述窄带回波信号生成和路信号,方位信号和俯仰信号;所述窄带环形器(302)还用于将所述和路信号传输至窄带和路通道(3032)中;所述窄带和路通道(3032)用于将接收到的所述和路信号与所述窄带本振信号进行下变频处理,获得中频模拟和路信号,并将其输入至所述a/d转换模块(500)中;所述窄带方位通道(3033)用于接收所述方位信号,并将所述方位信号与接收到的所述窄带本振信号进行所述下变频处理,获得对应的中频模拟方位信号,并将所述中频模拟方位信号输入至所述a/d转换模块(500)中;所述窄带俯仰通道(3034)用于接收所述俯仰信号,并将所述俯仰信号与接收到的所述窄带本振信号进行所述下变频处理,获得对应的中频模拟俯仰信号,还将所述中频模拟俯仰信号输入至所述a/d转换模块(500)中。4.如权利要求3所述的自主探测成像一体化雷达装置,其特征在于,所述a/d转换模块(500)包括:第一a/d转换器(501),其分别与所述宽带接收通道(3031)和所述逆合成孔径雷达isar二维成像模块(800)连接,所述第一a/d转换器(501)用于对接收到的所述中频模拟宽带回波信号进行采样,使其转换成数字成像信号,并将所述数字成像信号输入至所述逆合成孔径雷达isar二维成像模块(800)中;第二a/d转换器(502),其分别与所述窄带和路通道(3032)和所述恒虚警模块(600)连接,所述第二a/d转换器(502)用于对接收到的所述中频模拟和路信号进行采样,使其转换
成数字和路信号,并将所述数字和路信号输入至所述恒虚警模块(600)中;第三a/d转换器(503),其分别与所述窄带方位通道(3033)和所述二维跟踪角误差提取模块(700)连接,所述第三a/d转换器(503)用于对所述中频模拟方位信号进行采样,使其转换成数字方位信号,并将所述数字方位信号输入至所述二维跟踪角误差提取模块(700)中;第四a/d转换器(504),其分别与所述窄带俯仰通道(3034)和所述二维跟踪角误差提取模块(700)连接,所述第四a/d转换器(504)用于对所述中频模拟俯仰信号进行采样,使其转换成数字俯仰信号,并将所述数字俯仰信号输入至所述二维跟踪角误差提取模块(700)中。5.如权利要求4所述的自主探测成像一体化雷达装置,其特征在于,所述恒虚警模块(600)用于根据在多个帧周期内接收存储的数字和路信号,分别计算获得每一所述帧周期的目标位置与和路信号;所述恒虚警模块(600)还用于控制所述微波源(100)在每一所述帧周期内产生所述宽带本振信号的时刻和输出所述探测窄带本振信号的时间。6.如权利要求5所述的自主探测成像一体化雷达装置,其特征在于,所述二维跟踪角误差提取模块(700)用于接收一帧所述数字俯仰路信号,一帧所述数字方位路信号,来自所述恒虚警模块(600)的目标位置及和路信号;所述二维跟踪角误差提取模块(700)还用于根据接收到的所述目标位置,并结合一帧所述数字俯仰路信号和一帧所述数字方位路信号获得目标俯仰信号和目标方位信号;根据所述目标俯仰信号与所述和路信号的比值,形成俯仰向跟踪角误差;根据所述目标方位信号与所述和路信号的比值,形成方位向跟踪角误差;所述二维指向机构(900)用于根据接收到的所述俯仰向跟踪角误差和所述方位向跟踪角误差控制卡塞格伦抛物面天线(400)稳定跟踪目标;当卡塞格伦抛物面天线(400)稳定跟踪目标后发出成像指令后,所述逆合成孔径雷达isar二维成像模块(800)用于对接收到的所述数字成像信号进行距离维fft处理,得到回波数据;对所述回波数据进行平动补偿,得到补偿数据,所述平动补偿包括包络对齐和初相校正补偿;对所述补偿数据进行方位维fft处理,得到所述逆合成孔径雷达isar二维图像。7.一种如权利要求1~7中任意一项所述的自主探测成像一体化雷达装置的使用方法,其特征在于,包括:步骤s1、根据在多个帧周期内接收存储的数字和路信号,分别计算获得每一所述帧周期的目标位置与和路信号,并控制产生所述宽带本振信号的产生时刻和输出所述探测窄带本振信号的输出时间;步骤s2、根据每一所述帧周期的所述目标位置、所述和路信号、所述数字俯仰信号以及所述数字方位信号,分别计算获得每一所述帧周期的俯仰向跟踪角误差和方位向跟踪角误差;步骤s3、根据每一所述帧周期的所述俯仰向跟踪角误差和所述方位向跟踪角误差稳定跟踪目标;步骤s4、当稳定跟踪所述目标后发出成像指令,接收并处理数字成像信号,然后输出所述目标的逆合成孔径雷达isar二维图像。
8.如权利要求7所述的自主探测成像一体化雷达装置的使用方法,其特征在于,所述步骤s1,包括:步骤s11、根据预先设置好的空域进行空域二维搜索;步骤s12、在搜索过程中,接收并存储帧周期内的一帧所述数字和路信号;步骤s13、在一帧所述数字和路信号中找到并剔除所述数字和路信号的功率的最大值;步骤s14、对剔除最大值后的其它所述数字和路信号的功率求平方和的均值,得到噪声平均功率,并将最大值的平方除以噪声平均功率得到目标信噪比;步骤s15、将所述目标信噪比与预先设定的截获准则的信噪比进行比较;步骤s16、当所述目标信噪比大于所述截获准则的信噪比,记录输出所述目标位置以及所述和路信号,控制产生所述宽带本振信号的时刻和输出所述窄带本振信号的时间,结束当前帧周期数据流程,等待下一帧周期数据接收存储后再重复所述步骤s13
‑
步骤s15;步骤s17、当所述目标信噪比小于或等于所述截获准则的信噪比时,结束当前帧周期数据流程,等待下一帧周期数据接收存储后再重复所述步骤s13
‑
步骤s15。9.如权利要求8所述的自主探测成像一体化雷达装置的使用方法,其特征在于,每一所述帧周期内,所述步骤s2,包括:步骤s21、接收并存储帧周期内的一帧所述数字俯仰信号、一帧所述数字方位信号、所述目标位置以及所述和路信号;步骤s22、根据所述目标位置,并结合一帧所述数字俯仰信号和一帧所述数字方位信号,获得目标俯仰信号和目标方位信号;步骤s23、根据所述目标俯仰信号与所述和路信号的比值,形成并输出所述俯仰向跟踪角误差;步骤s24、根据所述目标方位信号与所述和路信号的比值,形成并输出所述方位向跟踪角误差。10.如权利要求9所述的自主探测成像一体化雷达装置的使用方法,其特征在于,所述步骤s4,包括:步骤s41、当稳定跟踪所述目标后发出成像指令,接收存储所述数字成像信号;步骤s42、对所述数字成像信号进行距离维fft处理,得到回波数据;步骤s43、对所述回波数据进行平动补偿,得到补偿数据,所述平动补偿包括包络对齐和初相校正补偿;步骤s44、对所述补偿数据进行方位维fft处理,得到所述逆合成孔径雷达isar二维图像。
技术总结
本发明公开了一种自主探测成像一体化雷达装置,包括:微波源,其用于生成窄带探测信号,宽带成像信号,窄带本振信号和宽带本振信号;发射机,其用于对接收到的窄带探测信号和宽带成像信号的功率进行放大处理;高频收发组件,其分别与微波源和发射机连接;五喇叭馈源的卡塞格伦抛物面天线,其与高频收发组件连接;A/D转换模块,其用于将高频收发组件所反馈的信号转换为数字信号;恒虚警模块,其用于根据接收到的数字信号获得目标的位置信息;二维跟踪角误差提取模块,其用于获得目标的跟踪角误差;逆合成孔径雷达ISAR二维成像模块其用于获得目标的逆合成孔径雷达ISAR图像;二维指向机构,其根据跟踪角误差,控制卡塞格伦抛物面天线稳定跟踪目标。天线稳定跟踪目标。天线稳定跟踪目标。
技术研发人员:高媛 江利中 李鸿志 李雁斌 李鸣 魏颖 高林星
受保护的技术使用者:上海无线电设备研究所
技术研发日:2021.09.22
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。